Предлагаемое изобретение относится к области машиностроения, а именно к станкостроению, и предназначено для использования в тяжелых крупногабаритных металлорежущих станках.
В настоящее время зубчато-реечные приводы подачи для тяжелых станков известны. Примером может служить привод подачи, описанный в книге «Станочное оборудование автоматизированного производства. В 2 томах. Том 1. М.: Изд-во «Станкин», 1993» на стр. 217 и изображенный на рис. 5.59. Данный и аналогичные ему приводы строятся, как правило, на прямозубых зубчато-реечных механических передачах, обладают достаточно большой нагрузочной способностью, но не всегда достаточной точностью обеспечения перемещения рабочего органа станка.
Из известных приводов, построенных на зубчато-реечных передачах наиболее близким к предлагаемому является привод подачи по авторскому свидетельству СССР SU 500010 A1, B23Q5/00, от 25.01.1976. Он содержит корпус, в котором жестко закреплены двигатель и линейный актуатор, косозубую рейку, выполненную с возможностью установки на станине станка, первую и вторую косозубые шестерни, находящиеся в зацеплении с упомянутой рейкой, и круговой датчик перемещения рабочего органа станка, при этом выходной шток линейного актуатора соединен с валом второй шестерни с возможностью его вращения относительно оси штока. Однако несмотря на то, что указанный привод весьма близок к предлагаемому по решаемой технической проблеме, средствам ее решения и совокупности существенных признаков, проблема не всегда достаточной точности отсчета перемещения рабочего органа станка при его использовании остается.
В развитие решения, защищенного упомянутым авторским свидетельством как прототипом, предлагаемое техническое решение проблемы достигается за счет того, что зубчато-реечный привод подачи рабочего органа тяжелого крупногабаритного металлорежущего станка, содержащий корпус, в котором жестко закреплены двигатель и линейный актуатор, косозубую рейку, выполненную с возможностью установки на станине станка, первую и вторую косозубые шестерни, находящиеся в зацеплении с упомянутой рейкой, и круговой датчик перемещения рабочего органа станка, при этом выходной шток линейного актуатора соединен с валом второй шестерни с возможностью его вращения относительно оси штока, отличается от прототипа тем, что он снабжен блоком управления двигателя с соединенным с ним задатчиком перемещения рабочего органа станка, и блоком управления линейного актуатора с соединенным с ним программатором погрешности передачи «первая шестерня - круговой датчик перемещения», причем выход упомянутого датчика соединен с блоком управления двигателя, а вал упомянутого датчика жестко соединен с валом второй шестерни, при этом один конец вала первой шестерни соединен с двигателем, а другой его конец выполнен с возможностью соединения с рабочим органом станка.
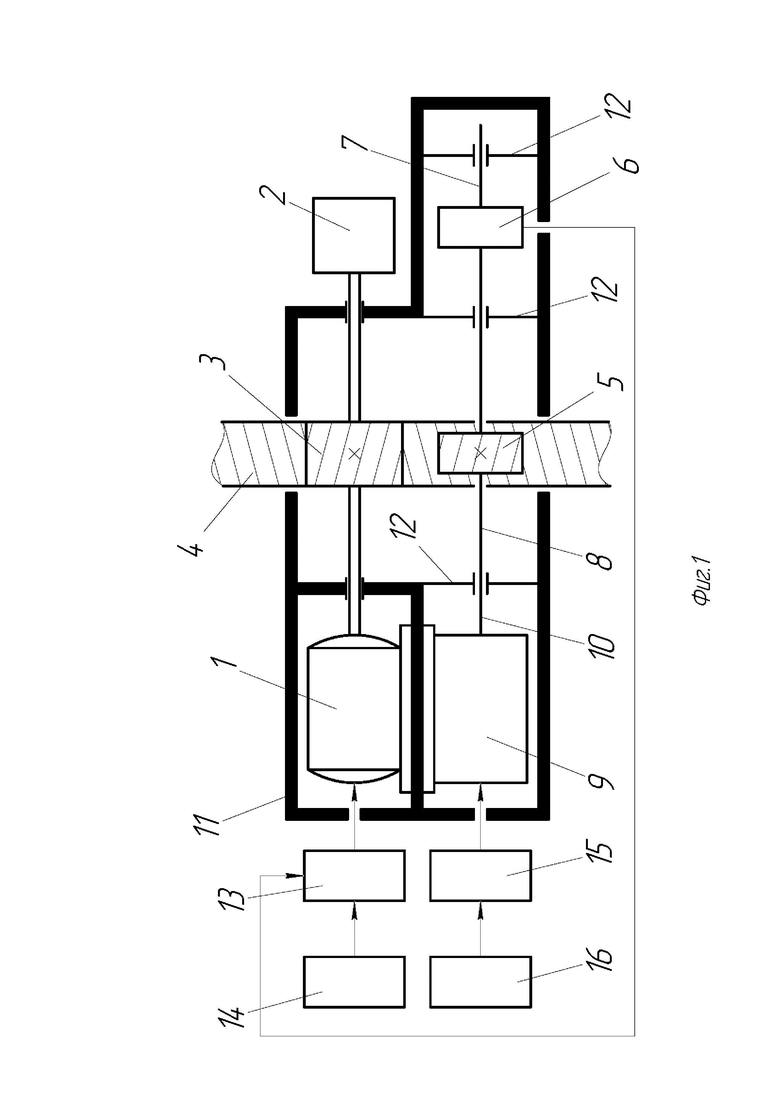
На фиг. 1 показана схема предлагаемого привода подачи. Она содержит двигатель 1, связанный с рабочим органом 2 станка через первую шестерню 3, находящуюся в зацеплении с рейкой 4, вторую шестерню 5, находящуюся в зацеплении с той же рейкой 4 (связанный так, что один конец вала шестерни 3 соединен с двигателем 1, а другой его конец выполнен с возможностью соединения с рабочим органом 2), круговой датчик 6 перемещения рабочего органа станка, вал 7 которого жестко соединен с валом 8 второй шестерни, линейный актуатор 9, выходной шток 10 которого соединен с валом 8 второй шестерни с возможностью вращения последнего относительно оси штока 10, при этом двигатель 1 и актуатор 9 жестко закреплены в корпусе привода, вторая шестерня и датчик установлены в корпусе 11 на подвеске 12 с возможностью осевого смещения, шестерни 3 и 5 и рейка 4 выполнены косозубыми, двигатель 1 снабжен блоком управления 13, соединенным с задатчиком 14 перемещения рабочего органа и выходом датчика, а актуатор 9 снабжен блоком управления 15, соединенным с программатором 16 погрешности передачи «первая шестерня 3 - датчик 6».
При использовании предлагаемого привода подачи вначале расчетом или экспериментально определяется погрешность  передачи «первая шестерня 3 - датчик 6» и с помощью программатора 16 вводится в блок управления актуатором 15. Затем задатчиком 14 в блок управления 13 двигателем 1 вводится числовое значение
передачи «первая шестерня 3 - датчик 6» и с помощью программатора 16 вводится в блок управления актуатором 15. Затем задатчиком 14 в блок управления 13 двигателем 1 вводится числовое значение  требуемой величины перемещения рабочего органа 2. Двигатель 1 вращается и через шестерню 3 сообщает движение подачи корпусу 11 и рабочему органу относительно неподвижной рейки 4 (она, как отмечалось, выполнена с возможностью установки на станине станка). Шестерня 5 при этом обкатывается по рейке 4 и сообщает вращение датчику 6. Датчик выдает сигнал о перемещении корпуса 11 и рабочего органа 2, поступающий в блок управления 13 двигателем 1. В общем случае этот сигнал равен
требуемой величины перемещения рабочего органа 2. Двигатель 1 вращается и через шестерню 3 сообщает движение подачи корпусу 11 и рабочему органу относительно неподвижной рейки 4 (она, как отмечалось, выполнена с возможностью установки на станине станка). Шестерня 5 при этом обкатывается по рейке 4 и сообщает вращение датчику 6. Датчик выдает сигнал о перемещении корпуса 11 и рабочего органа 2, поступающий в блок управления 13 двигателем 1. В общем случае этот сигнал равен  где
где - составляющая, характеризующая теоретическое перемещение рабочего органа, а - его погрешность, обусловленная кинематической погрешностью передачи «шестерня 3 - датчик 6». Сигнал от датчика 6 поступает в блок управления 13 двигателем 1, где сравнивается с и далее отрабатывается двигателем 1 в следящем режиме (по принципу управления по отклонению). Но составляющая при этом поступает в блок управления 15 линейным актуатором 9 и заставляет его шток 10 смещаться в осевом направлении. Поскольку рейка 4 и зубчатое колесо 5 косозубые, последнее в дополнение к основному вращение получает доворот, обусловленный скольжением зубьев колеса по зубьям рейки, как по наклонной поверхности. Этот доворот передается валу 7 датчика 6 и сигнал от датчика корректируется на величину
- составляющая, характеризующая теоретическое перемещение рабочего органа, а - его погрешность, обусловленная кинематической погрешностью передачи «шестерня 3 - датчик 6». Сигнал от датчика 6 поступает в блок управления 13 двигателем 1, где сравнивается с и далее отрабатывается двигателем 1 в следящем режиме (по принципу управления по отклонению). Но составляющая при этом поступает в блок управления 15 линейным актуатором 9 и заставляет его шток 10 смещаться в осевом направлении. Поскольку рейка 4 и зубчатое колесо 5 косозубые, последнее в дополнение к основному вращение получает доворот, обусловленный скольжением зубьев колеса по зубьям рейки, как по наклонной поверхности. Этот доворот передается валу 7 датчика 6 и сигнал от датчика корректируется на величину 
Так как элементы привода в целом составляют следящую систему, он работает, постоянно стремясь обеспечить  . В соответствии с этим техническим результатом предложения является повышение точности зубчато-реечного привода подачи.
. В соответствии с этим техническим результатом предложения является повышение точности зубчато-реечного привода подачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчато-реечный привод подачи металлорежущего станка с ЧПУ | 2020 |
|
RU2764105C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Устройство для измерения линейных перемещений подвижного органа станка | 1986 |
|
SU1705021A1 |
| Устройство для измерения перемещений | 1986 |
|
SU1373531A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |
| Линейный реечный привод штангового глубинного насоса для добычи нефти (варианты) | 2019 |
|
RU2720609C1 |
| Силовой стол | 1976 |
|
SU891227A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Устройство для перемещения листового материала к обрабатывающей машине | 1988 |
|
SU1556801A1 |
Изобретение относится к области станкостроения и может быть использовано в приводе подачи рабочего органа тяжелых крупногабаритных металлорежущих станков для обработки крупногабаритных и длинномерных деталей. Привод подачи содержит корпус, в котором жестко закреплены двигатель и линейный актуатор, косозубую рейку, выполненную с возможностью установки на станине станка, первую и вторую косозубые шестерни, находящиеся в зацеплении с упомянутой рейкой, и круговой датчик перемещения рабочего органа станка, причем выходной шток линейного актуатора соединен с валом второй шестерни с возможностью его вращения относительно оси штока. При этом привод снабжен блоком управления двигателем с соединенным с ним задатчиком перемещения рабочего органа станка и блоком управления линейным актуатором с соединенным с ним программатором погрешности передачи «первая шестерня - круговой датчик перемещения». Использование изобретения позволяет повысить точность работы привода подачи. 1 ил.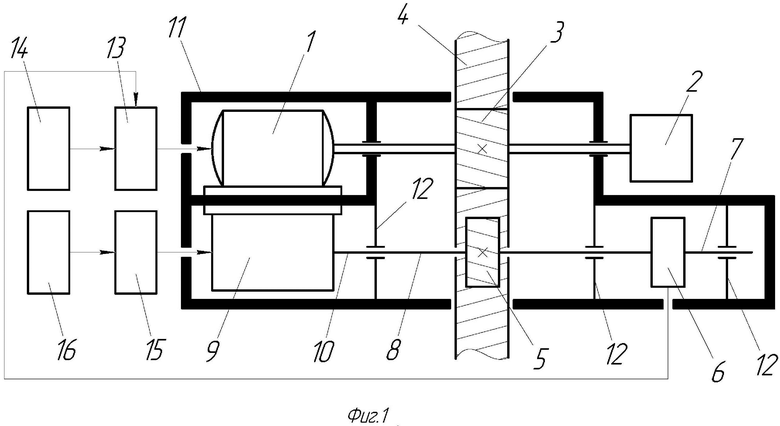
Зубчато-реечный привод подачи рабочего органа тяжелого крупногабаритного металлорежущего станка, содержащий корпус, в котором жестко закреплены двигатель и линейный актуатор, косозубую рейку, выполненную с возможностью установки на станине станка, первую и вторую косозубые шестерни, находящиеся в зацеплении с упомянутой рейкой, и круговой датчик перемещения рабочего органа станка, при этом выходной шток линейного актуатора соединен с валом второй шестерни с возможностью его вращения относительно оси штока, отличающийся тем, что он снабжен блоком управления двигателем с соединенным с ним задатчиком перемещения рабочего органа станка и блоком управления линейным актуатором с соединенным с ним программатором погрешности передачи «первая шестерня - круговой датчик перемещения», причем выход упомянутого датчика соединен с блоком управления двигателя, а вал упомянутого датчика жестко соединен с валом второй шестерни, при этом один конец вала первой шестерни соединен с двигателем, а другой его конец выполнен с возможностью соединения с рабочим органом станка.
| Следящий привод подач рабочих органов | 1974 |
|
SU500010A1 |
| Линейный шаговый привод | 1973 |
|
SU477820A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Механизм привода тяжелого станка | 1988 |
|
SU1604551A1 |
| Способ соединения пайкой стали с алюминием | 1959 |
|
SU125115A1 |
| US 5305227 A, 19.04.1994 | |||
| CN 102814690 A, 12.12.2012 | |||
| CN 106862982 A, 20.06.2017. | |||

