АР- 1;/ ре-.; - зп . - глб;.ритоа
J НМЛ Я.;Л.П :; С Ч pilC .liVI- МОЛОГ -i . KM/. РО.Ч- ОЛНОС СИ Л ЛГ-МСП /) -ЛЛСЙ бол1. ШИ.Х И СЛО. фОрМЫ И f-.ORLiil kiНИС ПЛДСУИОС Г И 3:1
ПЫНОГ. Л
ни ивзаи;;л пс р ори;ю. элемон гoi:
КИС.:. LiX ПрИ СП ОС
СКг-м
КИ ,
CTfv.
Gjic-ммй, Агатом;) ; иче- (мни;-: сс/;,-. I а г р :: а i i;; HJ станЯ - Г paxCilOpTHHM уСГрОЙь ТраНГ.П - ГГГНПе уСТрОНС .,,) Ви ЛОЛ:;о;о и г..-де диух lyya-ir 5 Ь, рлспоJ C. . .. .: FiCp К J i ОЙ ПЛОСКОСТИ,
05р;-; Г чГ . л-- 9 уст ьтли- вэ.;---1 г.л нл nc:v-.;:oTi-iyio oany n;i; .;v3O - мог о ка1-;:о;-; т-:,;л« fi-.cr.r: iiopo; vrn pa
МЫ О (ЧПрТШ ЛЬНОО n) iiC.;-t .:tWf ДСТЛЛЬ ,ОЗЬ Гц1 : 1СЯ МП ЦИЛИ(-:/ рМ1 еСКИХ П, |ЛЬц.чх 7 iiiv,hti ::n 11/ганги, умироясь в огра- ничйт елЬпые упоры В. /,-лее перемещпстс. н-п iuar fv,-:MO направляющих пл.гшок 3 и поплЛ --т г) зому при- способлснин. Цилиндр /1 с помощью рымсчгос-) 24, 5, тяги .8 поворачи:-злет и л л ы. П р и о т ом п р о у и; и Не-1, р а с п ол ож е н - мне на толкателях 1, сжимаются, обеспечивал предварительный прижим лета- леи к бозопым планка.. Лалее ,вклю- чаются (и; .нь:е мехг Н ,змы 17, ксто- |)ые зажимают деталь. 1 з.п.ф-лы. 8 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Приспособление для автоматического и периодического продвигания бумажной ленты в адресопечатающей машине | 1924 |
|
SU1366A1 |
| Автоматическая линия | 1985 |
|
SU1355455A1 |
| Вертикальный давильно-отрезной полуавтомат | 1982 |
|
SU1082520A1 |
| Устройство для запрессовки и обрезки ладков в грифе музыкального инструмента | 1985 |
|
SU1307471A1 |
| Автоматическая линия для обработки вертикально расположенных плоских деталей | 1984 |
|
SU1199591A1 |
| Загрузочно-разгрузочное устройство | 1989 |
|
SU1636166A1 |
| Приспособление к токарному станку | 1986 |
|
SU1373571A1 |
| Способ ориентации деталей с внутренними полостями и устройство для его осуществления | 1989 |
|
SU1645223A1 |
| Устройство для изготовления полых деталей из полосового и ленточного материала | 1983 |
|
SU1204302A1 |
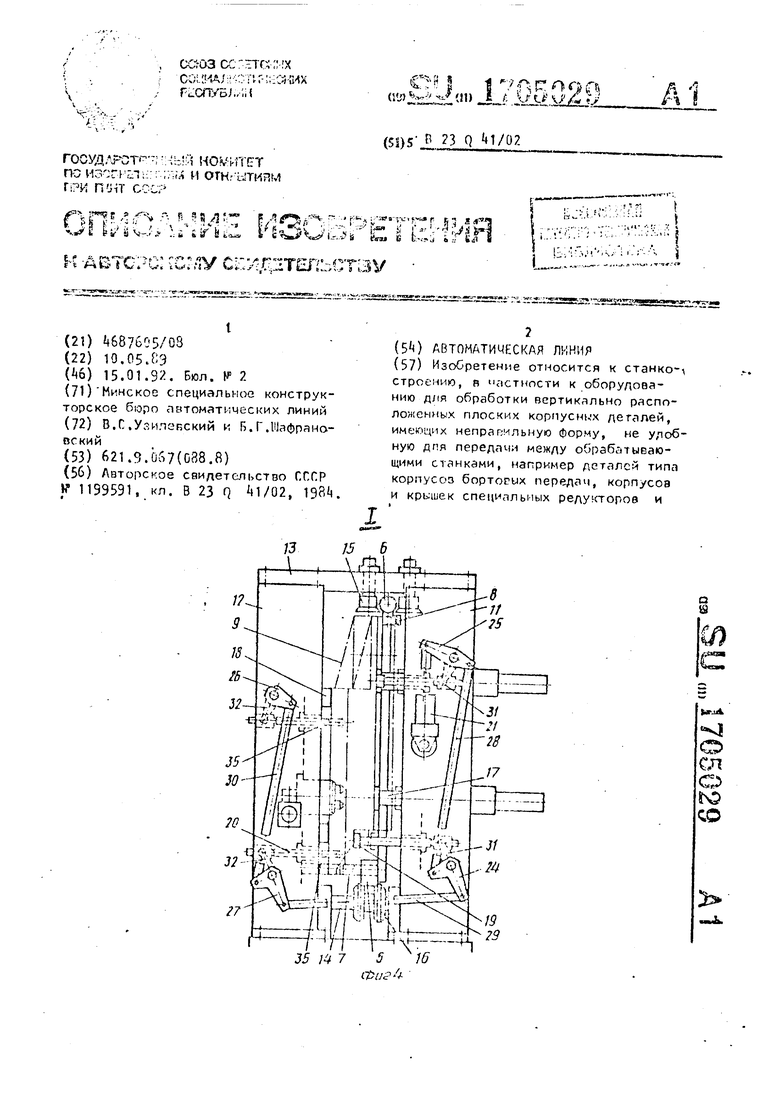
Изобретение отног.птся к стгшко- строению, R частности к оборудованию для обработки г;срт 1кгпльно расг.оло- исминх плоских корпусных деталей, непра;:и; 1ьну-о форму, не удобную для ойто.г п;чсс сой пзредаии между обрабатипзппмни станками, напри мер, д-.тглс;м т:-;ма стенок корпусов бо топнх передач, icopiiycoa и кр : ; :ек спе реду|-п opo s и др.
Цель изо5окто;- 1-:п - расширение тех -юяогичвскг.-й пог-.,- о,чости r-ici счет обрг.Оо-j ки детаген больших г айзритоо и c. iONiMofi формы и гогышзниз наде:кно- сти ;: счет выкоса i з зоны резания пер j/i/rij- ..ix эломенто.1: замнмных при- спосоогсник.
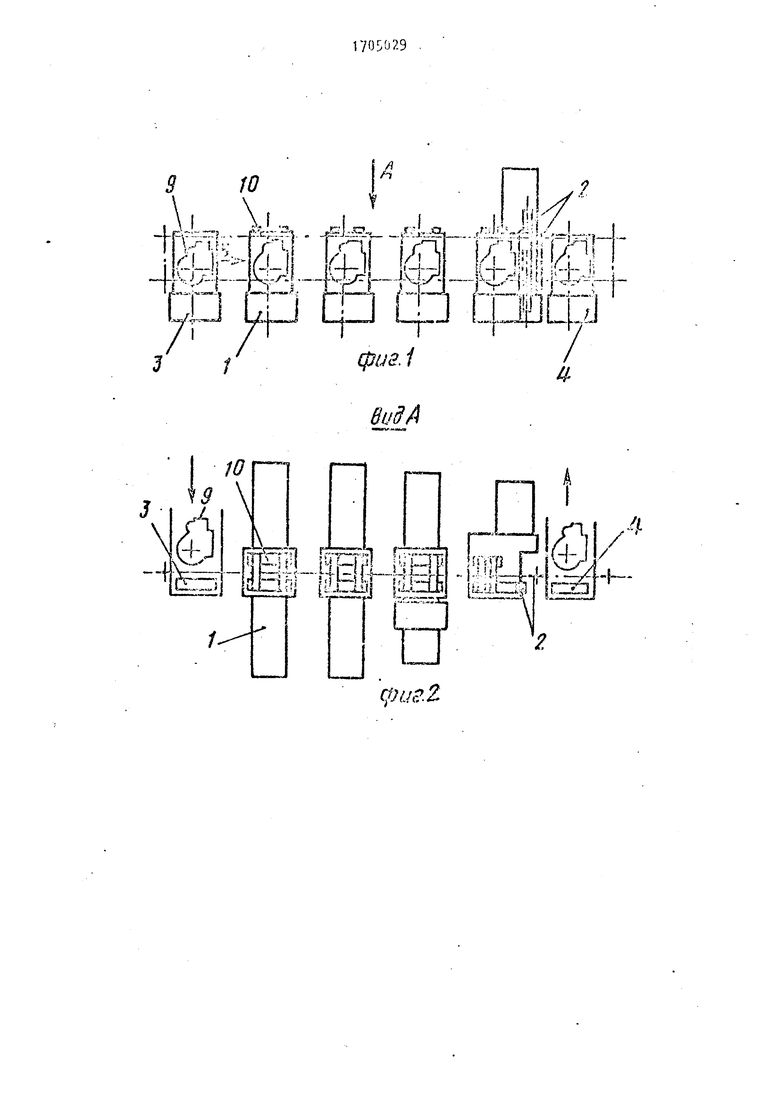
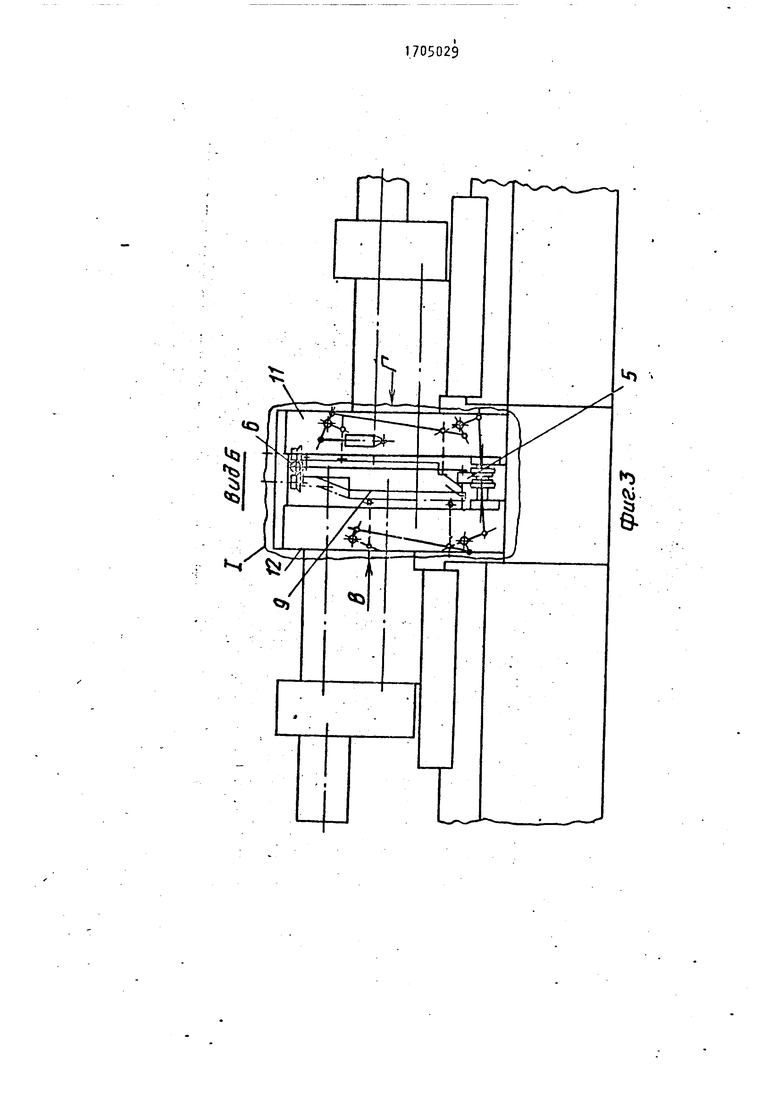
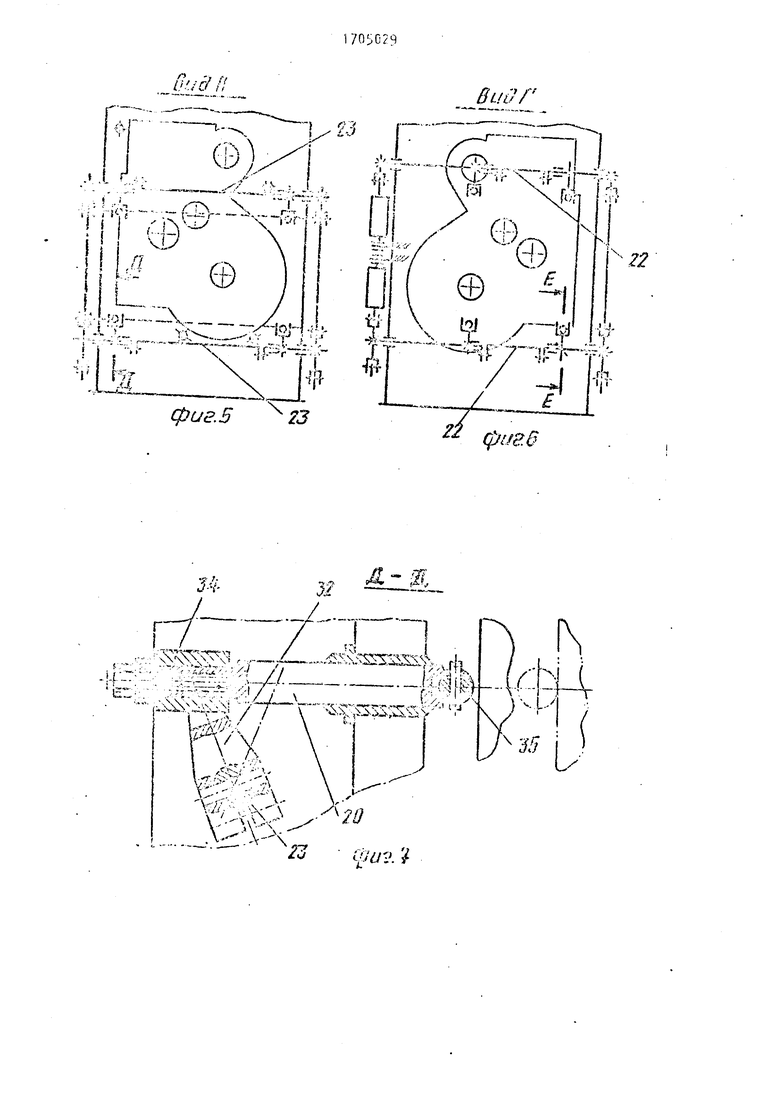
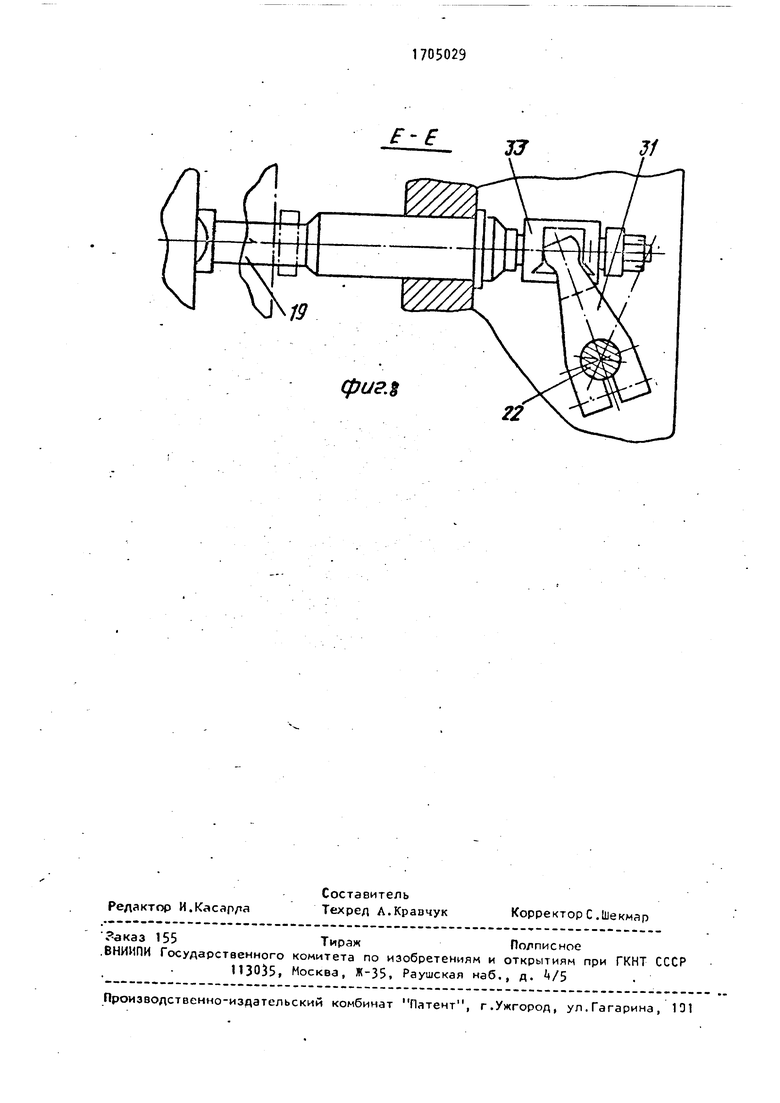
фиг, 1 по клз-ча аитоиати - р-скпя лин:1я . ( , н- фиг,2 - А на ф -т.Т: па Ф:г, 3 RM на (;;иг. i , на фиг, t - улел I нп фиг.З; на t,:r, S - п-:,1 П н фчг. Ъ на (,.tr, ь }:ид Г пг; ф:1г,3; а иг.7 IJ33DC3 на (.-;; г. f;, на фиг. 8 - ра:-; р в з Г. - i н a PV i г, (-.
Лгтсмагиис скпя /ч- мия содс|.у--т агр М .-i гныс C ii.i-:i .:i 1. между с. транспорт1-1:м устрсйстгом 2,
Загрузс.: : 3 ПЗГРУЗО1 Н .- Й (
i c .HTC - - .п оли, г н с; -: : 4t) 3 о Риде попорет.-:i:x ргм. Т( г.;-.спорт ыос уст- г.гист-ю 2 г;ьлс:- 3 и f,.
:i ,-i.
.. -. ::T4 ;.. мл Я Л э , Ч :- . .. Н Ч О
зигс даух штан HII:-IX и вертикальной :n j j i at ;,a i ; мс.от
.. :;и : c;i oy;cH.:i .;. л;., о 1-1 7. о. ::ру| Ло;; сеч .ге
.,; ;-г.-:с . ,и угс ра0
5
ми 8. Обрсгбатываемая деталь 9 устанавливается п зажимное приспособление 10, виполненное п виде двух 5 стоек 11 и 12, между которыми расположены штачги 5 и 6 транспортного устройства, связаннее между собой стяжками 13 и 14 с расположенными на них роликами 15 и 16 для направления штанг 5 и 6. Верхняя стяжка 13 выполнена в виде плоской накладки с расточками, в которых консольно на вертикальных осях закреплены ролики 15, а нижняя стяжка - в виде оси с устлнойленными на ней роликами 16.
Зажимное приспособление 10 содержит .зажимные механизмы 17, базирующие элементы (не обозначены), бокопые базовые планки 18, толкатели 19 и съемники 20, имеющие общий привод 21 и кинематически свклг.н- ные между cc.fi ой. При под съемникоо 20 и толкателей.1Я виполнсч в виде ци- Л .мдрз, распо/ю:хеиного яз ЕНСШНСЙ. стороне стойки 11 и сия анного с приходными горм;онтальнь; ш валами 22 и 23 соответственно толкателей 9 и сге никоз 20, смонтированными в стойках 11 и 12. посредством рычагов 2)-2/ и синхрс М1зиру--мХ тяг 28-30, смонтированных снарун;м. Но приводных валах 22 жестко зэкроплены рычаги 3, осязании:; с толкателями 19. Аналогично на ;ллах /3 установлены Г-Ы1-:,1ГИ 32, осу;;.. с т t-n;.:/.-..о привод .- iiKOrf P.O. : олкач гл i г-иполмены сборники и сосчолт и.з п-гпру-..чнепной е-;у;;ки-33 с п, и счоственно тол0
5
0
КЛТГ Ы 13. Съе.ЧННГИ 20 ИМПОЫ еНЫ
-IM ООразСМ 11 СПС7.0НТ ИЗ ПОЛ
3 i и собстпенно
логьч;
п р у ш н с и н с и н т у j i к и
съемника 20. Причем съемники 20, рас- положенный п горизонтальной плоскости, соединены попарно между собой напраплш хчими планками 35.
Аг: тома гическая линия работает следующим образом.
Об птбтыпаемыс: детали 9 устанавливаются ни пороротнуо раму загрузочного к-in гсг.: теля 3. После попорота рамы п кортикальное положение деталь оказывается на цилиндрических Пальцах 7 ни.кней штанги, упираясь при этом п ограничительные упоры 8, обес- печиьою ие устойчивое положение деталей при транспортировке их от станга к станку. После этого деталь 9 перемещается вперед на од;1Н шаг мимо направляющих планок 35 и попадает в зону приспособления. Включается цилиндр 21 и через рычаги и 25 и тяги 28 поворачивает валы 22, нз которых установлены рычаги 31 привода толкателей 19, передвигающих детали до контакта с базовыми планками. При этом пружины, расположенные на толкателях 19, сжинается, обеспечивая предварнтельный прижим деталей к базовым планкам 18.
Такой предварительной прижим (с помощью подпружиненных толкателей) деталей обеспечивает возможность перемещения детали в плоскости.параллельной базовой, в любом направление, для окончательного базирования, что крайне необходимо для деталей, имеющих нетомные базы и требу 1.,:ix, например, центрирования по необработанному отперстию, а
также досылки до упора в наружную поверхность,
После этого гключа тся зажимные мпхонмзмы 17 и зажимают обрабатыЈ-:пе1мую деталь, происходит обработка, а 1итанги 5 и Ь гюзпра:;;.- югся в исхс)/1ное полог сине. По окончании обработки ,а :имные механизмы 1/ возрр.и.очтсн в исходное положение. Включается другая полость гидроцилцндро 21 и с помощью рычагов 24-26,- тяг 28-30 приводит съемники 20, спяааннь е направляющими JQ планками 35, которое .зврс лчаот обработанное детали на штанги lj и 6 транспортера. После тога, как деталь пернул с... на штанг и 5 н 6, цикл работы линии пооторяется.
5
Формула изобретения
Q рыполненное в виде доух штанг, расположенных в вертикальнс:й плоскости, и агрегатные станки со смонтированными на стойках зажимными приспособлениями, элементы приводя ко5 торых, включающие толкатели, кинематически связаны приводными валами с элементами привода съемников, о т- л и ч а ю щ а я с я тем, что, с целью расширения технологических воэ0 мощностей и посышения надежности, штанги транспор/тного устройства расположены между двумя стойками каждого зажимного приспособления, элементы привода толкателей зажимных приспособлений расположены на внешней стороне каждой стойки, а элементы пригюда съемникое - на внешней стороне противоположной стойки, при этом съемники и толкатели выполнены
0 подпружиненными, а их приводные рллы расположены п горизонтальной плоскости .
5
jf- dLpi
fcz:j
/
N
A
1
BMBfl iHH
™l5 i
jа СЛ1(
-m-,.дг. т а u( .5( Я Ь i fc
jum iiqp
J I-j.-j-л--J-4-1 -f 1-й--. -} -1-5-JdHnj iibif iH|
L
/ГнК
. .
i , i ( I
/. ill l/t M
4Ј
i-
iffrfir
i i j
/4
-i-
iH|
L
cpuff.Z
Cwdf
г--
- | л
I L, . w/.
e
e
...jS
i i T
:f I 2T
фиг.5
fj
p J-4Ж/.,
n
4:r
Ј
ТтЛЧЛ- Х
.,
:-.- .e,Јiji- .- / /I
. -. - -- - .- .
Ш
(; /, ; -
1
PY/V i
i ; 1 .
F-;7-;3v
ф 20
.
Buff Г
,
Ъ
(; /, ; - у
ЧЗГ5
u1
.
Е-Е
фиг.п
