ривод, представляющий собой два коаксиально расположенных пневмоцилиндра 11 и 20, причем шток 10 внутреннего пневмоцилиндра 11 шарнирно связан с рычагами 2 для захвата магнитной системы, а крышка 29 наружного пневмоцилиндра 20, выполняющая функцию штока, связана с двумя пуансонами, которые расположены в двух сквозных отверстиях корпуса 1, выполненных в местах расположения лапок планки магнитной системы. В позиции разгрузки на автоматической линии собранная магнитная система подается в устройство разгрузки. Полюсные наконечники магнитной
системы своими свободными концами полностью входят в отверстия корпуса рычажного механизма. Отверстия выполнены глухими, и их диаметры-соответствуют величине полюсных наконечников. Два рычага 2, расположенные симметрично в пазах корпуса 1-и закрепленные на осях 3, движутся навстречу друг другу по дуге до тех пор, пока калибрывставки 6, расположенные на концах рычагов 2, не установятся над лапками планки в местах их гибки, т.е. захватят магнитную систему, после чего пуансоны, перемещаясь в сквозных отверстиях корпуса 1, производят гибку лапок планки. 2 з.п. ф-лы, 7 ил.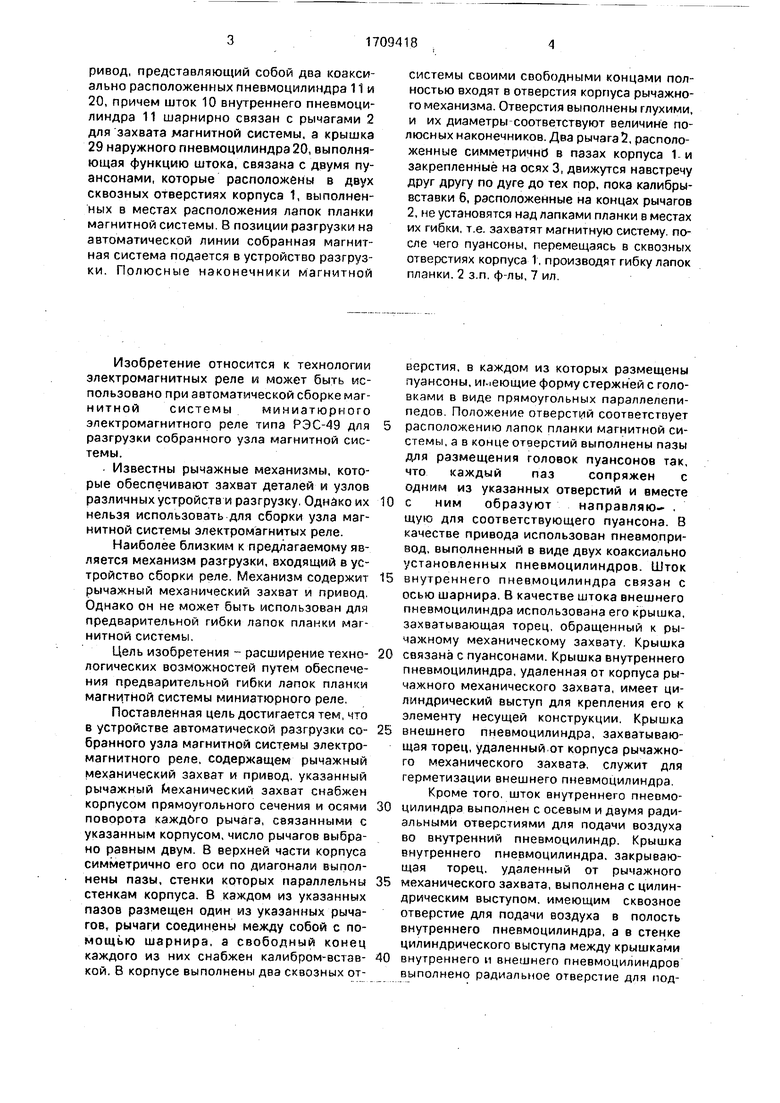
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| КЛИПСАТОР | 2000 |
|
RU2162638C1 |
| Станок для гибки с растяжением профилей | 1990 |
|
SU1779433A1 |
| Установка для прессования,съема и загрузки изделий на конвейер | 1984 |
|
SU1238969A1 |
| АВТОМАТ ДЛЯ ГИБКИ ЛИСТОВЫХ ЗАГОТОВОК | 1970 |
|
SU263554A1 |
| Устройство для горячей вытяжки днища | 1986 |
|
SU1366261A1 |
| Устройство для установки и развальцовки контактных штырей на печатных платах | 1989 |
|
SU1709574A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| МАШИНА ДЛЯ СБОРКИ РАДИАЛЬНЫХ ПОДШИПНИКОВС цилиндричпскилги РОЛИКАМИ | 1969 |
|
SU422879A1 |
| Устройство для групповой клепки | 1980 |
|
SU929297A1 |
Изобретение относится к электротехнике, в частности к технологии сборки электромагнитных реле. Цель изобретения - расширение технологических возможностей путем обеспечения предварительной гибки лапок планки магнитной системы реле. Конструкция устройства позволяет выполнять одновременно две технологические операции на едином устройстве - разгружать собранную на автоматической линии магнитную систему реле и производить гиб- ку лапок ее планки. Устройство автоматической разгрузки содержит рычажный механизм для захвата и удержания магнитной системы, расположенный в корпусе 1, пару пуансонов для гибки лапок и пневмоп-^•vlО О.^00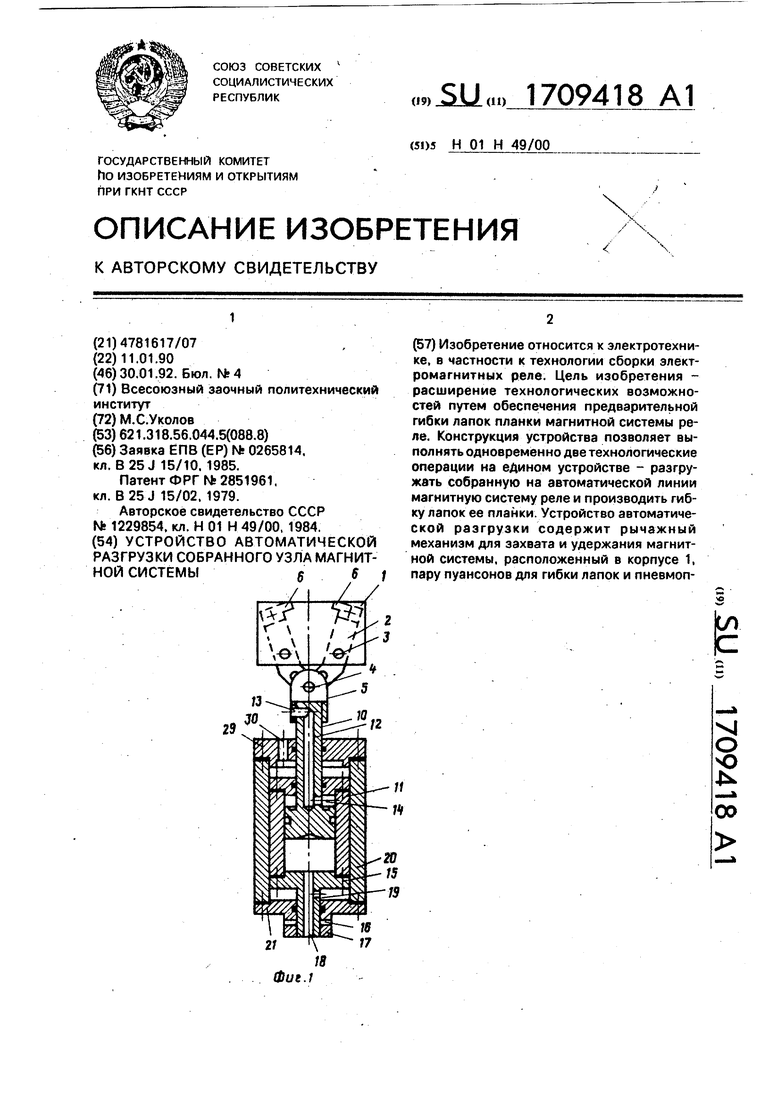
Изобретение относится к технологии электромагнитных реле и может быть использовано при автоматической сборке магнитной системы миниатюрного электромагнитного реле типа РЭС-49 для разгрузки собранного узла магнитной системы.
Известны рычажные механизмы, которые обеспечивают захват деталей и узлов различных устройств и разгрузку, Однйко их нельзя использовать для сборки узла магнитной системы злектромагнитых реле.
Наиболее близким к предлагаемому является механизм разгрузки, входящий в устройство сборки реле. Механизм содержит рычажный механический захват и привод. Однако он не может быть использован для предварительной гибки лапок планки магнитной системы.
Цель изобретения - расширение технологических возможностей путем обеспечения предварительной гибки лапок планки магнитной системы миниатюрного реле.
Поставленная цель достигается тем, что в устройстве автоматической разгрузки собранного узла магнитной системы злектромагнитного реле, содержащем рычажный механический захват и привод, указанный рычажный 1еханический захват снабжен корпусом прямоугольного сечения и осями поворота каждого рычага, связанными с указанным корпусом, число рычагов выбрано равным двум. В верхней части корпуса симметрично его оси по диагонали выполнены пазы, стенки которых параллельны стенкам корпуса. В каждом из указанных пазов размещен один из указанных рычагов, рычаги соединены между собой с помощью шарнира, а свободный конец каждого из них снабжен калибром-вставкой, В корпусе выполнены два сквозных отверстия, в каждом из которых размещены пуансоны, иг-.еющие форму стержней с головками в виде прямоугольных параллелепипедов. Положение отверстий соответствует
расположению лапок планки магнитной системы, а в конце отэерстий выполнены пазы для размещения головок пуансонов так, что каждый паз сопряжен с одним из указанных отверстий и вместе
с ним образуют направляю , щую для соответствующего пуансона. В качестве привода использован пневмопривод, выполненный в виде двух коаксиально установленных пневмоцилиндров. Шток
внутреннего пневмоцилиндра связан с осью шарнира, В качестве штока внешнего пневмоцилиндра использована его крышка, захватывающая торец, обращенный к рычажному механическому захвату. Крышка
связана с пуансонами. Крышка внутреннего пневмоцилиндра, удаленная от корпуса рыча.жного механического захвата, имеет цилиндрический выступ для крепления его к элементу несущей конструкции. Крышка
внешнего пневмоцилиндра, захватывающая торец, удаленный от корпуса рычажного механического захвата, служит для герметизации внешнего пнеамоцилиндра. Кроме того, шток внутреннего пнеомоцилиндра выполнен с осевым и двумя радиальными отверстиями для подачи воздуха во внутренний пневмоцилиндр. Крышка внутреннего пневмоцилиндра, закрывающая торец, удаленный от рычажного
механического захвата, выполнена с цилиндрическим выступом, имеющим сквозное отверстие для подачи воздуха в полость внутреннего пневмоцилиндра, а в стенке цилиндрического выступа между крышками
внутреннего и внешнего пневмоцилиндров выполнено радиальное отверстие для подачи воздуха одновременно и в полость внешнего лневмоцилиндра. Крышка внешнего пневмоцилиндра, удаленная от рычажного механического захвата, выполнена с отверстием, в которое введен цилиндрический выступ крышки внутреннего пневмоцилиндра.
В предложенном устройстве рычажный механический захват снабжен корпусом прямоугольного сечения и осями поворота каждого рычага, Число рычагов выбрано равным двум, в верхней части корпуса симметрично относительно его оси по диагонали выполнены пазы, стенки которых параллельны Стенкам корпуса. В каждом из пазов размещен один из рычагов, рычаги соединены между собой с помощью шарнира, а свободный конец каждого из них снабжен калибром-вставкой, причем указанные оси поворота рычагов связаны с корпусом. В качестве привода использован пневмопривод, выполненный в виде двух коаксиально установленных пневмоцилиндров и пуансонов. Шток внутреннего цилиндра связан с осями указанного шарнира. В качестве штока внешнего пневмоцилиндра использована его крышка, закрывающая торец, обращенный к указанному рычажному механическо у захвату. Пуансоны связаны с крышкой внешнего пневмЪцилиндра и выполнены в виде стержней с головками в виде прямоугольных параллелепипедов, В корпусе рычажного механического захвата выполнены два отверстия, положение которых соответствует расположению лапок планки собираемой магнитной системы, а также дополнительные пазы для размещения головок пуансонов, так что каждый паз сопряжен с одним из указанных отверстий в корпусе и вместе с ним образует направляющую для соответствующего пуансона.
Шток внутреннего пневмопривода может быть выполнен с осевым отверстием для подачи воздуха. Крышка внутреннего пневмоцилиндра, закрывающая торец, удаленный от рычажного механизма, выполнена с цилиндрическимвыступом в центре. Крышка внешнего пневмоцилиндра, удаленная от рычажного механизма, выполнена с отверстием, в которое введен выступ. крышки внутреннего пневмоцилиндра. В стенке цилиндрического выступа между крышками внутреннего и внешнего пневмоцилиндров выполнено радиальное отверстие для подачи воздуха.
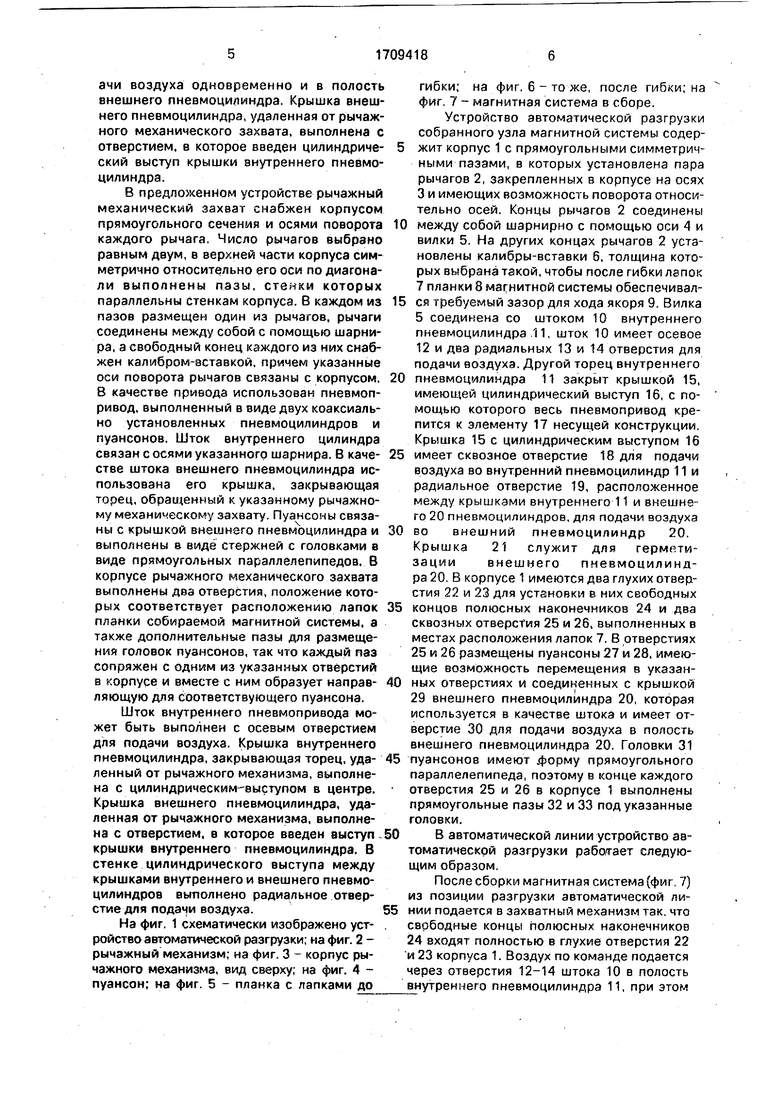
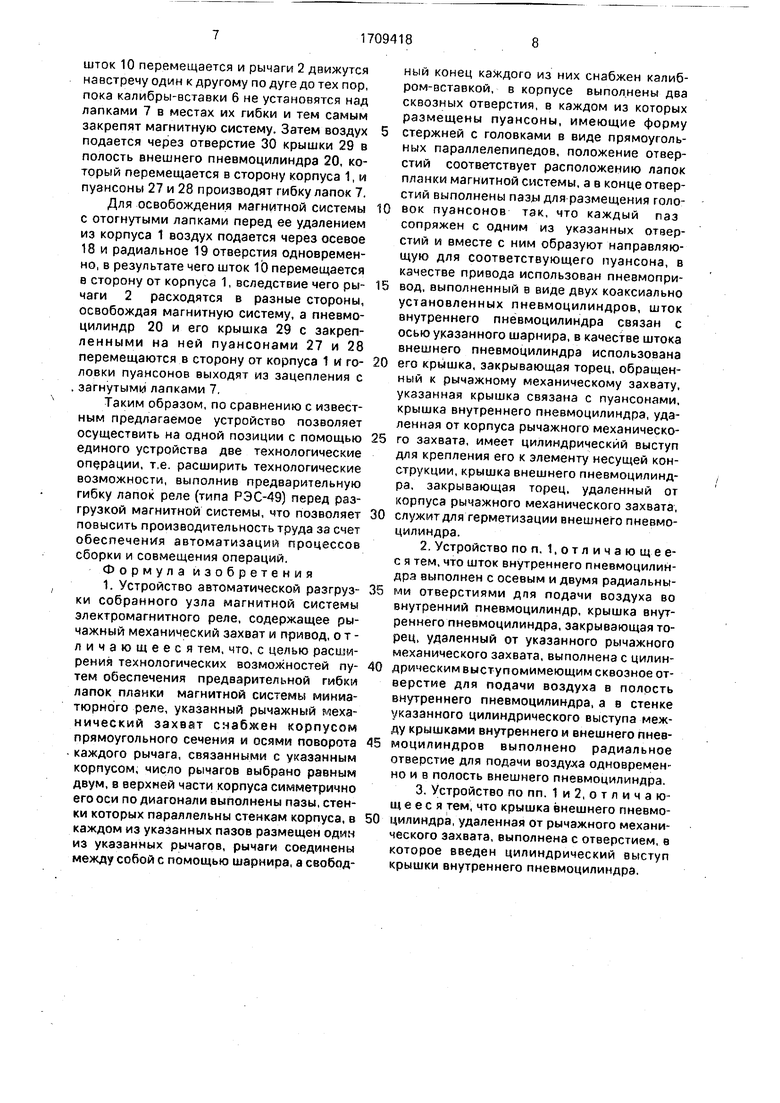
На фиг. 1 схематически изображено устройство автоматической разгрузки; на фиг. 2 рычажный механизм; на фиг. 3 - корпус рычажного механизма, вид сверху; на фиг. 4 пуансон; на фиг. 5 - планка с лапками до
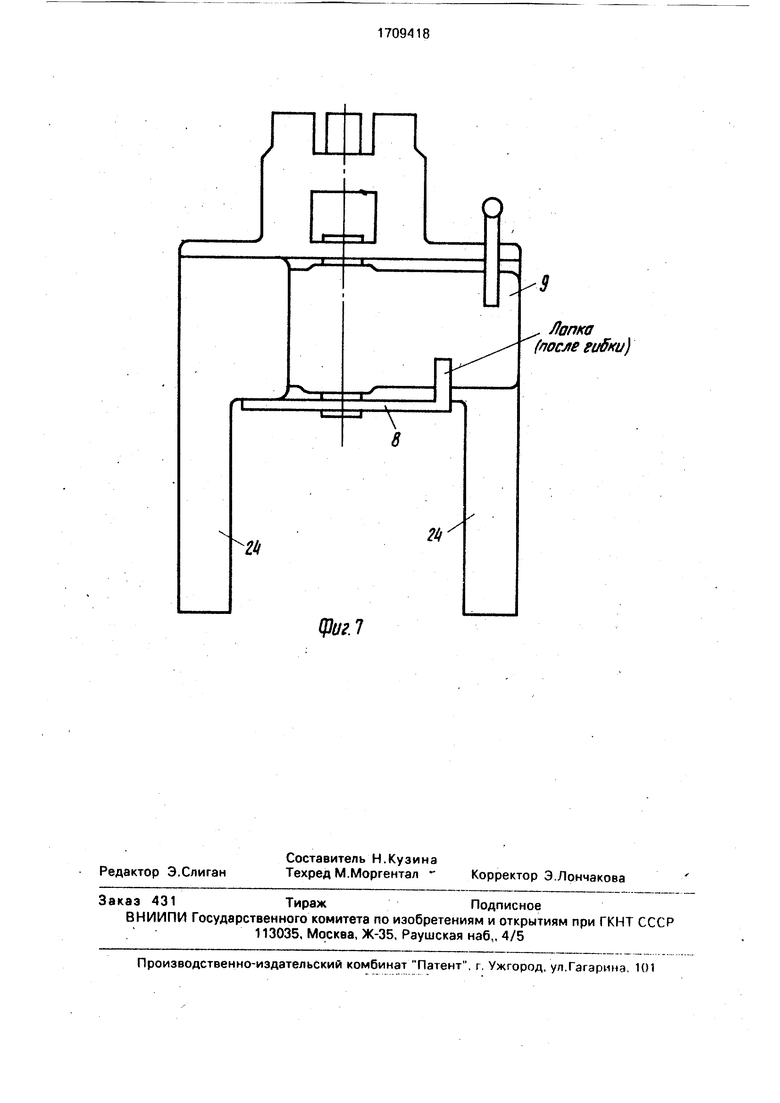
гибки; на фиг, 6 - то же, после гибки; на фиг, 7 - магнитная система в сборе.
Устройство автоматической разгрузки собранного узла магнитной системы содержит корпус 1 с прямоугольными симметричными пазами, в которых установлена пара рычагов 2, закрепленных в корпусе на осях 3 и имеющих возможность поворота относительно осей. Концы рычагов 2 соединены между собой шарнирно с помощью оси 4 и вилки 5. На других концах рычагов 2 установлены калибры-вставки б, толщина которых выбрана такой, чтобы после гибки лапок 7 планки 8 маг;нитной системы обеспечивался требуемый зазор для хода якоря 9. Вилка 5 соединена со штоком 10 внутреннего пневмоцилиндра .11, шток 10 имеет осевое 12 и два радиальных 13 и 14 отверстия для подачи воздуха. Другой торец внутреннего пневмоцилиндра 11 закр1ыт крышкой 15, имеющей цилиндрический выступ 16, с помощью которого весь пневмопривод крепится к элементу 17 несущей конструкции. Крышка 15 с цилиндрическим выступом 16 имеет сквозное отверстие 18 для подачи воздуха во внутренний пневмоцилиндр 11 и радиальное отверстие 19, расположенное между крышками внутреннего 11 и внешнего 20 пневмоцилиндров, для подачи воздуха во внешний пневмоцилиндр 20, Крышка 21 служит для герметизации внешнего пневмоцилиндра 20, В корпусе 1 имеются два глухих отверстия 22 и 23 для установки в них свободных концов полюсных наконечников 24 и два сквозных отверстия 25 и 26, выполненных в местах расположения лапок 7. В отверстиях 25 и 26 размещены пуансоны 27 и 28, имеющие возможность перемещения в указанных отверстиях и соединенных с крышкой 29 внешнего пневмоцилиндра 20, которая используется в качестве штока и имеет отверстие 30 для подачи воздуха в полость внешнего пневмоцилиндра 20, Головки 31 пуансонов имеют ,форму прямоугольного параллелепипеда, позтому в конце каждого отверстия 25 и 26 в корпусе 1 выполнены прямоугольные пазы 32 и 33 под указанные головки.
В автоматической линии устройство автоматической разгрузки работает следующим образом.
После сборки магнитная система (фиг. 7) из позиции разгрузки автоматической линии подается в захватный механизм так. что сврбодные концы полюсных наконечников 24 входят полностью в глухие отверстия 22 и 23 корпуса 1, Воздух по команде подается через отверстия 12-14 штока 10 в полость внутреннего пневмоцилиндра 11, при этом
шток 10 перемещается и рычаги 2 движутся навстречу один к другому по дуге до тех пор, пока калибры-вставки 6 не установятся над лапками 7 в местах их гибки и тем самым закрепят магнитную систему. Затем воздух подается через отверстие 30 крышки 29 в полость внешнего пневмоцилиндра 20, который перемещается в сторону корпуса 1, м пуансоны 27 и 28 производят гибку лапок 7, Для освобождения магнитной системы с отогнутыми лапками перед ее удалением из корпуса 1 воздух подается через осевое 18 и радиальное 19 отверстия одновременно, в результате чего шток 10 перемещается е сторону от корпуса 1, вследствие чего рычаги 2 расходятся в разные стороны, освобождая магнитную систему, а пневмоцилиндр 20 и его крышка 29 с закрепленными на ней пуансонами 27 и 28 перемещаются в сторону от корпуса 1 и головки пуансонов выходят из зацепления с . загнутыми лапками 7,
Таким образом, по сравнению с известным предлагаемое устройство позволяет осуществить на одной позиции с помощью единого устройства две технологические операции, т.е. расширить технологические возможности, выполнив предварительную гибку лапок реле (типа РЭС-49) перед разгрузкой магнитной системы, что позволяет повысить производительность труда за счет обеспечения автоматизации процессов сборки и совмещения операций. Формула изобретения 1. Устройство автоматической разгрузки собранного узла магнитной системы электромагнитного реле, содержащее рычажный механический захват и привод, о т личающееся тем, что, с целью расширения технологических возможностей путем обеспечения предварительной гибки лапок планки магнитной системы миниатюрного реле, указанный рычажный механический захват снабжен корпусом прямоугольного сечения и осями поворота - каждого рычага, связанными с указанным корпусом, число рычагов выбрано равным двум, в верхней части корпуса симметрично его оси по диагонали выполнены пазы, стенки которых параллельны стенкам корпуса, в каждом из указанных пазов размещен один из указанных рычагов, рычаги соединены между собой с помощью шарнира, а свободный конец каждого из них снабжен калибром-вставкой, в корпусе выполнены два сквозных отверстия, в каждом из которых размещены пуансоны, имеющие форму
стержней с головками в виде прямоугольных параллелепипедов, положение отверстий соответствует расположению лапок планки магнитной системы, а в конце отверстий выполнены пазу для размещения головок пуансонов так, что каждый паз сопряжен с одним из указанных отверстий и вместе с ним образуют направляющую для соответствующего пуансона, в качестве привода использован пневмопривод, выполненный в виде двух коаксиально установленных пневмоцилиндров, шток внутреннего пневмоцилиндра связан с осью указанного шарнира, в качестве штока внешнего пневмоцилиндра использована
его крышка, закрывающая торец, обращенный к рычажному механическому захвату, указанная крышка связана с пуансонами, крышка внутреннего пневмоцилиндра, удаленная от корпуса рычажного механического захвата, имеет цилиндрический выступ для крепления его к элементу несущей конструкции, крышка внешнего пневмоцилиндра, закрывающая торец, удаленный от корпуса рычажного механического захвата,
служит,для герметизации внешнего пневмоцилиндра.
фиг.2
JJ Jf
23
22 31 32 Фиг, 3
Jf
Mecfno
Место
gU&f(U
Фиг. 5
V
Фиг.
Фиг. 6
(Риг. 7
Лопко (после ft/ffffu)
| ГИДРАВЛИЧЕСКИЙ УДАРНЫЙ МЕХАНИЗМ | 0 |
|
SU265814A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
