Изобретение относится к многодвигательному асинхронному электроприводу горных машин, содержащему гидромуфты преимущественно для машин с цепным тяговым органом (струговые установки, ск{эебковые конвейеры и др.).
Известен способ выравнивания нагрузок в миогодвигательном приводе горных мдщин с использ эванием асинхронных электродвигателей с короткозамкнутым ротором посредством применений гидромуфт для смягчения механических характеристик, что обеспечивает улучшение распределения нагрузок между двигателями.
Однако степень равномерностц распределения нагрузок в значительной мере остается зависимой от заполнения гидромуфты рабочей живостью, которая практи чески не поддается непосредственному контролю. В Процессе эксплуатации из-за утечек рабочей жидкости объемы заполнения гидромуфт существенно различаются, что вместо улучшения приводит, наоборот, к ухудшению распределения нагрузок между двигателями.
Известен также способ защиты гидромуфт многодвигательных приводов, по которому в рабочем режи|иге машины производят измерение токов нагрузки двигателей и при отл ичии тока 8 рдном из двигателей от номинального значения отключают привод. Этот способ можно считать пригодным для выравнивания нагрузок межд; двигателями, если использовать порогсюый элемент для включения сигнализирующего устройства, а в дальнейшем изменять заполнение гидромуфт.
Недостатком указанного способа является необходимость обеспеч ения номинального нагружения привода, что не всегда достижимо при эксплуатации. Кроме тоге, текущие токовые нагрузкм двигателей в рабочем режиме, в особенности соединенных кинематически через протяженный цепной тйговый орган, не соответствуют действительной загрузке п тводов, а, как правило, характеризуют имеющие место колебания, обусловленные электромагнитными и электромеханическими процессами, в которые вовлечены элементы привода (двигатели, гидромуфты, редукторы).
Известен также способ защиты гидромуфт многодвигательжм о привода, по которому с целью увеличения надежности фиксируют величину минимал ьной нагрузки контролируемых двигателей, определяют среднеарифметическую нагрузку на двигатели привода, которую сравнивают с минимальной фактической нагрузкой, и отключают привод, когда разность упомянутых нагрузок достигает предельно допустимого значения.
Однако для данного способа характерно несоответствие текущих измеряемых токое двигателей их действительной загрузке из-за влияния колебательных ороцессов. Кроме того, необходимо многократно повторять процесс измерения, так при однократ ном измерении могут выявить двигатель с
0 минимальной нагрузкой и откорректировать заполнение соединенной с ним муфты, что не исключает неудовлетворительного заполнения других гидромуфт, которое может быть выявлено только при повторных
5 измерениях.
Известные способы не позволяют установить, каким образом и насколько должно быть изменено заполнение каждой из гидромуфт, чтобы выровнять нагрузку между
0 двигателями. Это также требует многократных измерений, из-за чего могут быть снижены требования по точности выравнивания нагрузок и, как следствие, уменьшиться эффективность работы привода.
5 Целью изобретения является повышение надежности работы п ривода и уменьшение трудоемкости его наладки.
Указанная цель достигается тем, что предварительно производят построение
0 тариррвочной кривой тока асинхронного двигателя при прочной пробуксовке гидромуфты в функции ее заполнения рабочей жидкостью. Затем при предпусковом обслуживании машин в реальных условиях экс5 плуаТации заклинивают тяговый орган, включают привод и с выдержкой времени на протекание переходных процессов в системе фиксируют величину токовой нагрузки контролируемых двигателей, после чего от0. ключают двигатели от сети и изменяют посредством, заправочно-дозирующего устройства заполнение гюлостей каждой из гидромуфт на величину обьема рабочей жидкости, соответствующего по знаку и величине на тарировочной кривой отклонению тока нагоузки от заданного эталонного значения. Изменение заполнения гидромуфт указанным образом позволяет выровнять токи, а следовательно, и пропорциональные им
0 крутящие моменты, развиваемые асинхронными двигателями в наиболее сложном режиме при пробуксовке гидромуфт под предельной нагрузкой, что должно способствовать повышению эффективностиработы привода.
5 На фиг. 1 приведена структурная схема машины,- на фиг.2 - тарировочная кривая тока электродвигателя в функции заполнения гидромуфты.
Машина (например конвейер, струговая
установка и т.п.) состоит из тягового органа
1, приводных звездочек 2 и 3, длектродвигателей 4 и 5. гидромуфт 6 и 7. редукторов 8 и 9. Токовые нагрузки двигателей измеряют, например, с помощью амперметров 10 и 11. Заклинивание тягового органа 1 произво дится с помощью стопорного приспособления 12. Предварительно производят построение тарировочной кривой (фиг.2}, которая представляет собой зависимость тока I нагрузки асинхронного двигателя or величины объема V заполнения гидромуфты рабочей жидкостью. Особенностью этой кривой является то, что для ее построения используются данные, полученные при полной пробуксовке (скольжение S 100%) насосного и турбинного колес гидромуфты. Это обеспечивает стабильность получаемой характеристики I f(V), исключая влияние на нее переходных процессов в двигателе и гидромуфте, что подтверждается опытными данными. Ппи построении функции f(V) устанавливаются эталонное значение тока 1э, которое соответствует максимально допу стимому крутящему моменту гидромуфты, при условии обеспечения ею защиты двигателя от опрокидывания, и соответствующий I объем заполнения муфты рабочей жидкостыо Vs.
Предлагаемый способ реализуется следующим образом.
В реальных условиях эксплуатации с помощью стопорного гтриспособления 12 при предпусковом обслуживании заклинивается одно из сечений тягового органа 1 и включается привод машины (аналогичный режим работы используется при монтажном натяжении тягового органа скребкового конвёй ера приводом). В связи с наличием непреодолимой нагрузки гидромуфты 6 и 7 пробуксовывают, обеспечивая защиту двигателей 4 и 5 от опрокидывания. При этом с выдержкой времени на протекание переходных процессов устанавливаются значения токов двигателя 4(i) и двигателя 5 (l2J. которые фиксируются на показывающих приборах. По тарировочной кривой (фиг.2) определяются All и Д1г - отклонения токов И и 12 от эталонного значения U, и соотг ветствующие Ati и Al2 значения объемов рабочей жидкости А Vi и А V2, которы|0ги нужно дополнить гидромуфты до эталонного значения заполнения Va. После этого отключается привод и производится йзме нение заполнения гидромуфт, обеспечивающее выравнивание токовых нагрузок между двигателями (ti 12 1э). что обеспечивает также выравнивание передаваем1Ь1Х двигателями крутяи их моментов. Аналогич ным сказом поступают в случае применения большего количества двигателей, что не вызывает необходимости увеличения количества измерений.
Проведенные нами эксперименты показывают, что выравнивание нагрузок двига телей при полной пробуксовке гидромуфт обеспечивает также значительное улучшение распределения нагрузок в многодвигательном приводе при установившемся
0 движении тягового органа в рабочем режиме машины.
Для предлагаемого способа харйктерны:
обеспечение максимальной эффективности работы привода, поскольку выравнивание нагрузок производится в наиболее сложном режиме работы машины при насостоявшемся пуске, где для трогания с места тягового органа необходима наибольшая
0 суммарная величина развиваемого пускового момента:
малая трудоемкость в связи с возмож ностью однократного измерения нагрузок; учет реальных условий эксплуатации
5 (параметров питающей электросети, расстановки двигателей и действительных механических характеристик двигателей и гидромуфт);
исключение влияния колебательных
0 процессов, поскольку измерения производятся при статическом нагружении привода постоянной нагрузкой.
Произведено опробование предлагаемого способа на лабораторном образце
5 скребкового конвейера и нагрузочной стендовой установке с порошковым тормозом ПТ250М, которое подтвердило его высокую эффективность.
Формул а и а обретени я
0 Способ выравнивания нагрузок в приводе конвейера с несколькими электродвигателями и включенными последовательно с ними гидромуфтами, заключающийся в измер€нии и сопоставлении величин токов нагрузки электродвигателей, отличающИ и с я тем, что, с целью повышения надежности работы привода и уменьшение трудоемкости его наладки, предварительно определяют эталонное значение тока на0 Грузки построением тарировочной кривой
величины тока нагрузки электродвигателя
. при полной пробуксовке гидромуфты в фун
кции от заполнения последней рабочей
жидкостью, заклини0а бт тяговый орган
5 конвейера, включают привод и с выдержкой времени на протекание переходных процессов фиксируют величину токовой нагрузки электродвигателей, затем выключают электродвигатели и изменяют объем заполнения полостей каждой из гидромуфт на ееличину, равную объему рабочей жидкости. соответствующему по знаку и величине на тарировочной кривой отклонению тока нагрузки от заданного эталонного значения.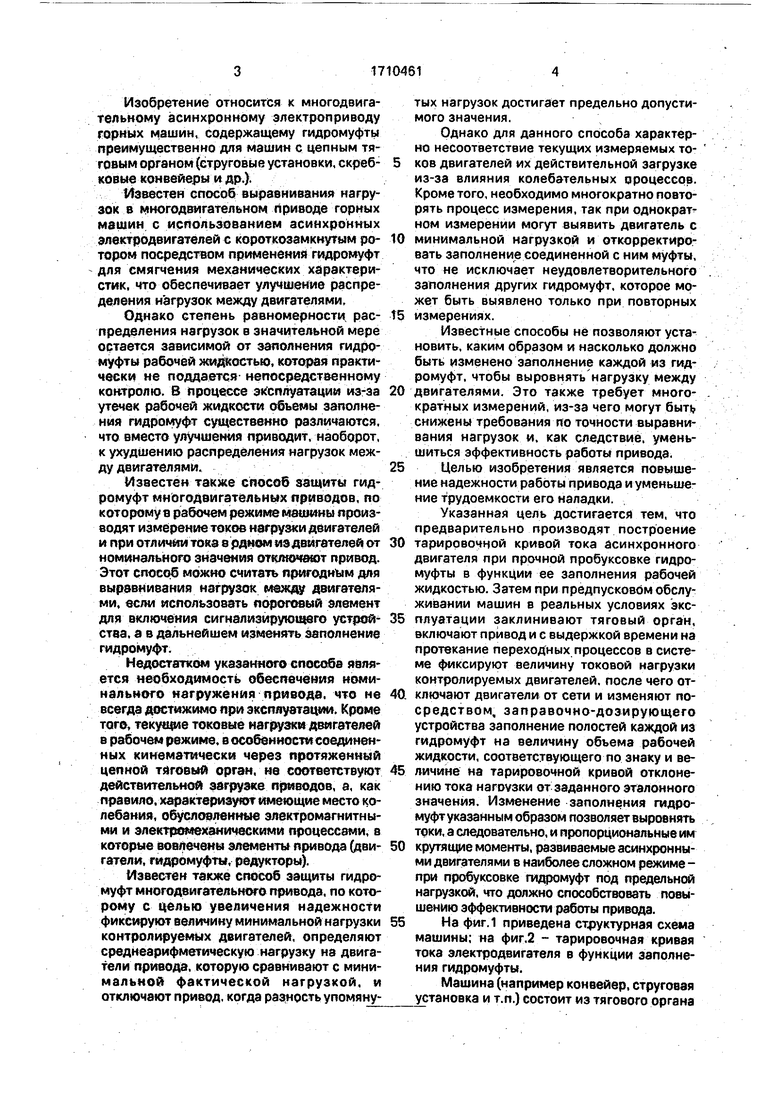

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2016 |
|
RU2624266C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1997 |
|
RU2136570C1 |
| Многодвигательный частотнорегулируемый электропривод | 1978 |
|
SU748767A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| СПОСОБ ПУСКА ЦЕПНОГО ТЯГОВОГО ОРГАНА ГОРНЫХ МАШИН И ПРИВОД ЦЕПНОГО ТЯГОВОГО ОРГАНА ГОРНОЙ МАШИНЫ | 2007 |
|
RU2379507C2 |
| СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 2013 |
|
RU2547123C1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Электропривод для шахтных самоходных машин | 1970 |
|
SU564982A1 |

/,Л
| Способ защиты турбомуфт многодвигательных приводов | 1971 |
|
SU491181A1 |
| кл,Н 02 h 5/06, 1971.Авторское свидетельство СССР № 455053, кл, В 65 G 23/06, 1972 | |||
