| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |
| Автооператор | 1980 |
|
SU891328A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Зажимное устройство | 2017 |
|
RU2646298C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Способ штамповки деталей из полосового материала и установка для его осуществления | 1987 |
|
SU1586826A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ ТОРМОЗНОГО ПРИВОДА | 2009 |
|
RU2533639C2 |
Изобретение относится к машиностроению и может быть использовано для автоматизации сборочных, процессов. Цель изобретения - расширение технологических возможностей. Захват содержит основание, приводной зажимной элемент и кинематически связанные с ним дополнительные зажимные элементы, причем в кинематические цепи дополнительных зажимных элементов введены сменные звенья, с помощью которых можно независимо друг от друга изменять скорости перемещения дополнительных зажимных губок. 4 ил.
Изобретение относится к машиностроению и может быть использовано для автоматизации сборочных процессов.
Цель изобретения - расширение технологических возможностей за счет различных скоростей перемещения зажимных элементов захвата.
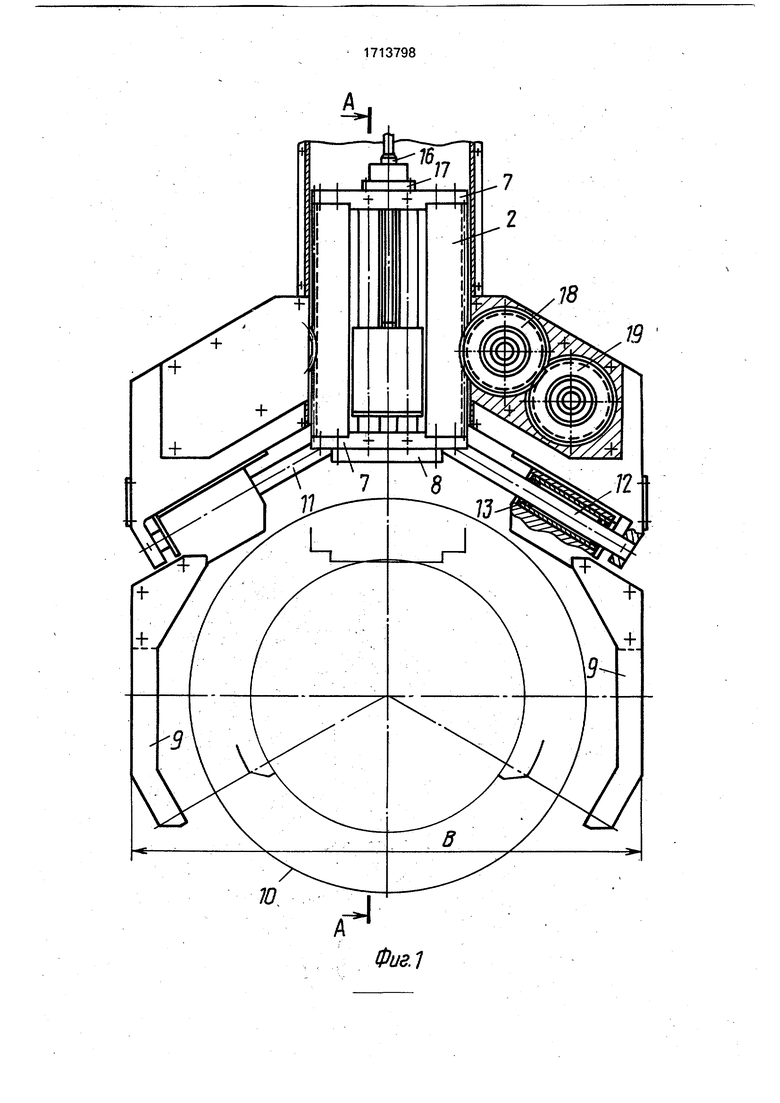
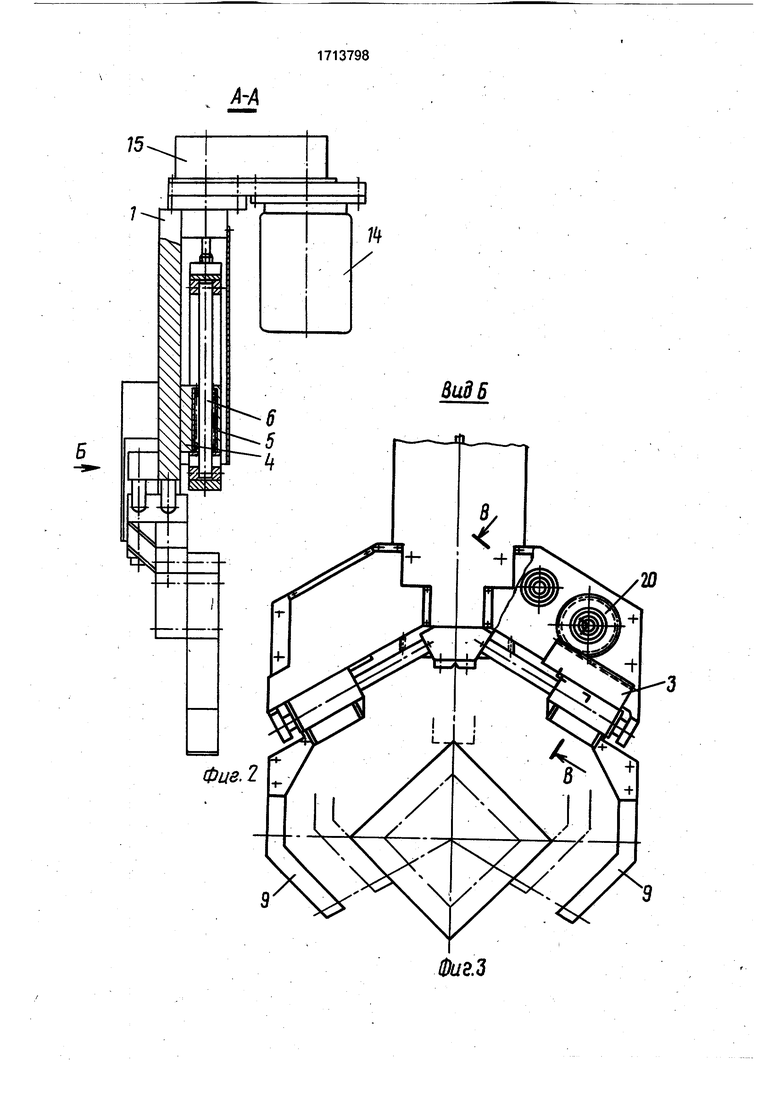
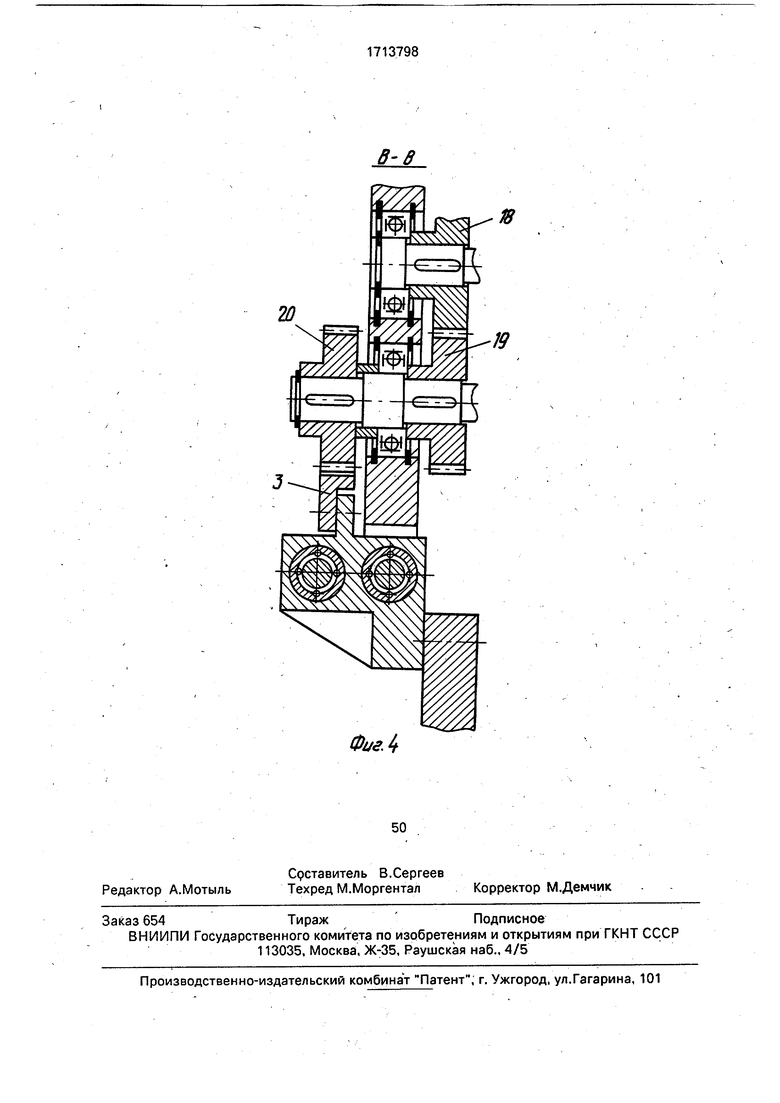
На фиг.1 показано устройство, общий вид; на фиг.2 - разрез А-А на фиг.1; на (J)Mr.3 - вид Б на фиг.2: на фиг.4 - разрез В-В на фиг.З.
Захват автооператора состоит из основания 1 и кинематически связанных между собой двухсторонней рейки 2 и односторонних реек 3. Основание 1 снабжено бобышкой 4. В бобышке 4 размещены шариковые втулки 5 для установки двух цилиндрических направляющих 6, которые закреплены в двухсторонней рейке 2.
Двухсторонняя рейка 2 содержит две рейки, соединенные стяжками 7. и приводной зажимной элемент 8, служащий для удержания совместно с дополнительными зажимными элементами 9 детали 10. Дополнительные зажимные элементы 9 крепятся к односторонним рейкам 3, которые установлены в пазах основания на цилиндрических направляющих 11 и 12 с возможностью перемещения посредством шариковых втулок 13. Привод захвата осуществляется от электродвигателя 14 через редуктор 15 и хрдовой винт 16. гайку 17. которая установлена на двухсторонней рейке 2. Соотношение шага и диаметра ходового винта 16 подобрано таким.что осуществляется самоторможение. Кинематическая связь двухсторонней рейки 2 и односторонних реек 3 осуществляется через постоянные и сменные элементы кинематических цепей, например рейки 2, 3 и шестерни 18-20, которые обеспечивают синхронизацию перемещения зажимных элементов и самоцентрирование захватываемых деталей.
Устройство работает следующим образом.
В исходном положении захвата .двухсторонняя рейка 2 поднята, односторонние рейки 3 разведены. После того, как захват будет приведен в положение, в котором должен произойти зажим детали, включается электродвигатель 14. Вращение его выходного вала передается через редуктор 15 на ходовой винт 16, помещенный в гайку 17, которая, перемещаясь, толкает двухстороннюю рейку 2, передвигающуюся поступательно посредством закрепленных в ней цилиндрических направляющих 6 в шариковых втулках 5. Находящиеся в зацеплении с двухсторонней рейкой 2 шестерни 18-20 передают движение односторонним рейкам 3, которые, перемещаясь по цилиндрическим направляющим 11 и 12, принимают зажимными элементами 9 деталь 10 к приводному зажимному элементу 8. Разжатие детали происходит при вращении вала электродвигателя в противоположную сторону. При этом элементы захвата возвращаются в исходное положение.
Применение зубчатых односторонних реек 3 и зубчатых колес 20 позволяет изменять передаточное отношение кинематических цепей дополнительных зажимных элементов, т.е. скорость их перемещения, что позволяет зажимать деталь некруглой формы и не перенастраивать захват при переходе от одного к другому типоразмеру деталей подобной формы.
Фор мула изобретения Захват автооператора, содержащий основание, приводной зажимной элемент и кинематически связанным с ним дополнительные зажимные элементы, причем в состав кинематической цепи каждого дополнительного зажимного элемента входят последовательно установленные зубчатая рейка приводного зажимного элемента, два зубчатых колеса и зубчатая рейка дополнительного зажимного элемента, отличающийся тем, что, с целью расширения технологических возможностей за счет различных скоростей перемещения зажимных элементов, в состав кинематической цепи каждого дополнительного зажимного элемента дополнительно введено зубчатое колесо, расположенное на одном валу с последним зубчатым колесом кинематической цепи, входящее в зацепление с зубчатой рейкой дополнительного зажимного элемента и имеющее возможность замены, кроме того зубчатая рейка дополнительного зажимного элемента выполнена также с возможностью замены.
Фи8.1
ft/г.З
20
Фие4
| Захват | 1980 |
|
SU905061A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
