крепленного на. вертикальных направляющих 38 рамного основания 1 редуктора 35 с диаметрально противоположно и соосно расположенными винтовыми штоками 39 и 40, имеющими нарезки противоположного напр1авлвния и взаимодействующими с вертикальными консолями 14 и 15. жестко связанными через шарнирно закрепленные по краям продольных балок рамного основания 1 поперечные валы 13 с парами рычагов 5 и 7. наклоненными в противоположные стороны, 1 з.п.ф-лы. 15 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| МОБИЛЬНАЯ ПЕРЕГРУЗОЧНАЯ УСТАНОВКА | 1993 |
|
RU2097305C1 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| Грузозахватное устройство | 1988 |
|
SU1525109A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
| УСТРОЙСТВО ДЛЯ ОТВОДА ВЕРТИКАЛЬНО ПОВОРОТНОЙ ОПОРНОЙ СТРЕЛЫ ОТ БОРТА РАКЕТЫ-НОСИТЕЛЯ | 2003 |
|
RU2246436C2 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |

Изобретение относится к вспомогательному подьемнр-транспортному оборудовав нию. в частности к средствам механизации трудоемких технологических процессов, выполняемых преимущественно с громоздкими и тяжеловесными узлами и отсеками машин и сооружений. Цель изобретения - обеспечение высокой точности позиционирования груза в широком диапазоне углов наклона стыкуемых поверхностей и сниже- ниб трудоемкости монтажа при обслуживании различных видов грузов. Монтажно-стыковочный агрегат содержитрамное основание 1 на колесном ходу с приводом перемещения, грузовую площадку 4, связанную с рамным основанием 1 шарнирными парами рычагов 5 и 7. кинематически взаимодействующими между собой посредством силового привода и грузозахватную траверсу 10 для фиксации поднимаемого груза. Грузовая площадка 4 выполнена в виде подвесной люльки, образованной соединением двух параллельно, расположенных дугообразных балок, обращенных выпуклостью к основанию и жестко связанных между собой поперечными стержнями, на которых смонтирована с возможностью крена и поперечного перемещения каретка 24, снабженная вертикальной цапфой 28, под грузозахватную траверсу 10. На боковых торцах люльки расположены пбдНружй- ненные пальцы 73, входящие в зацепление с профилированными пазами 56,57 копире, выполненного в виде Двух вертикально установленных и параллельно расположенных рычагов 46, связанных посредством ползунов 48 с рамным основанием 1. Силовой привод выполнен в виде шарнирно за-•%i^4$аСА) СО 00>&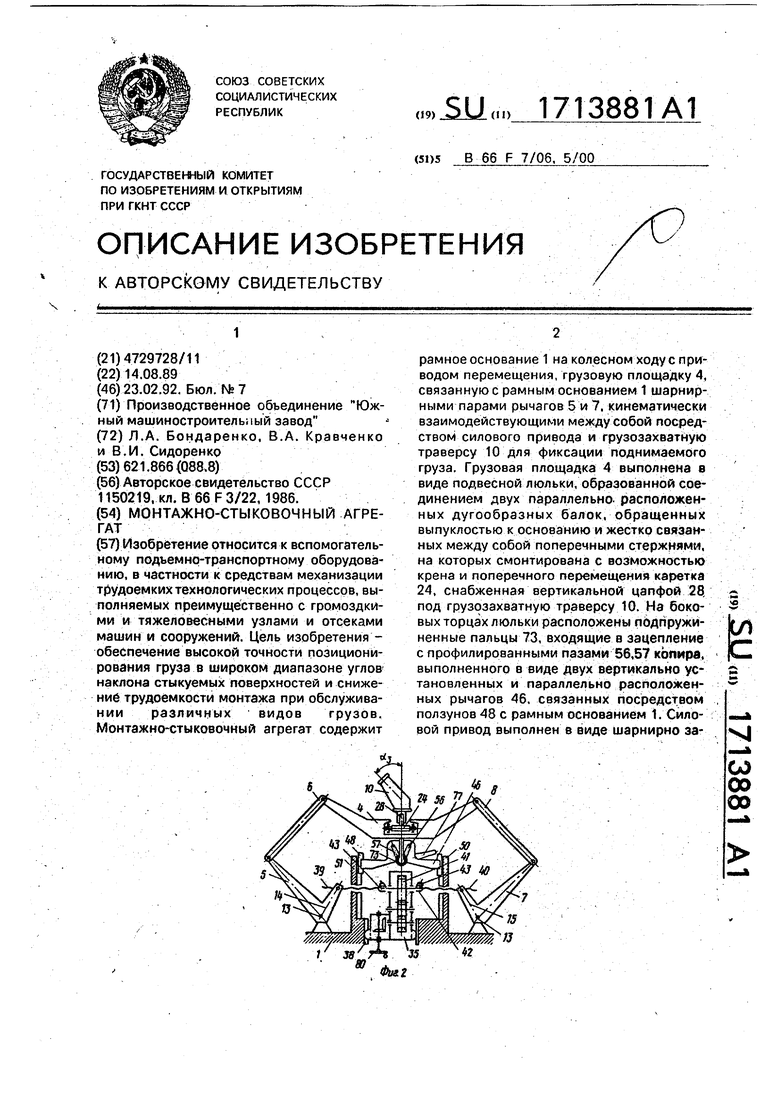
Изобретение относится к вспомогатель ному подъемно-транспортному технологическому оборудованию, в частности к cpkeдcтвaм механизации технологических процессов, например при выполнении трудоемких монтажных работ с громоздкими, сложными по конфигурации и крупногабаритными узлами машин и агрегатов, и может быть использовано в различных отраслях народного хозяйства, например химической, энергетической и машиностроительной.
Цель изобретения обеспечение высокой точности позиционирования грузов в широком диапазоне углов наклона стыкуемых поверхностей и снижение трудоемкости монтажа при обслуживании различных видов грузов.
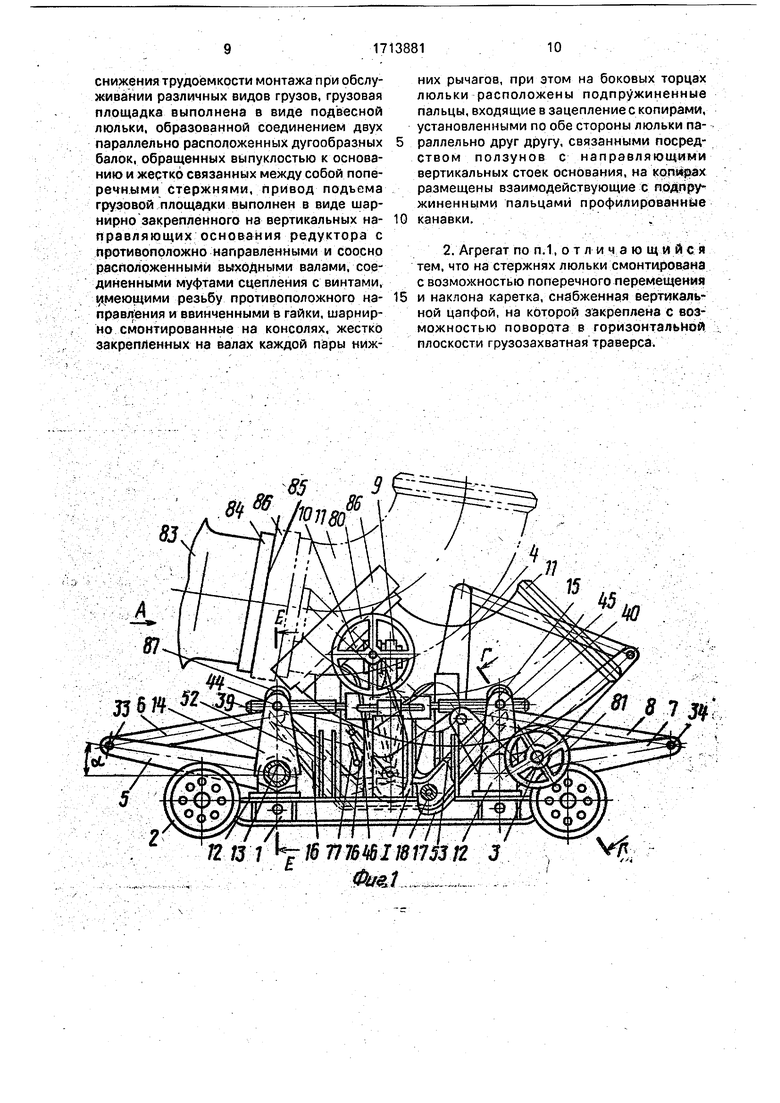
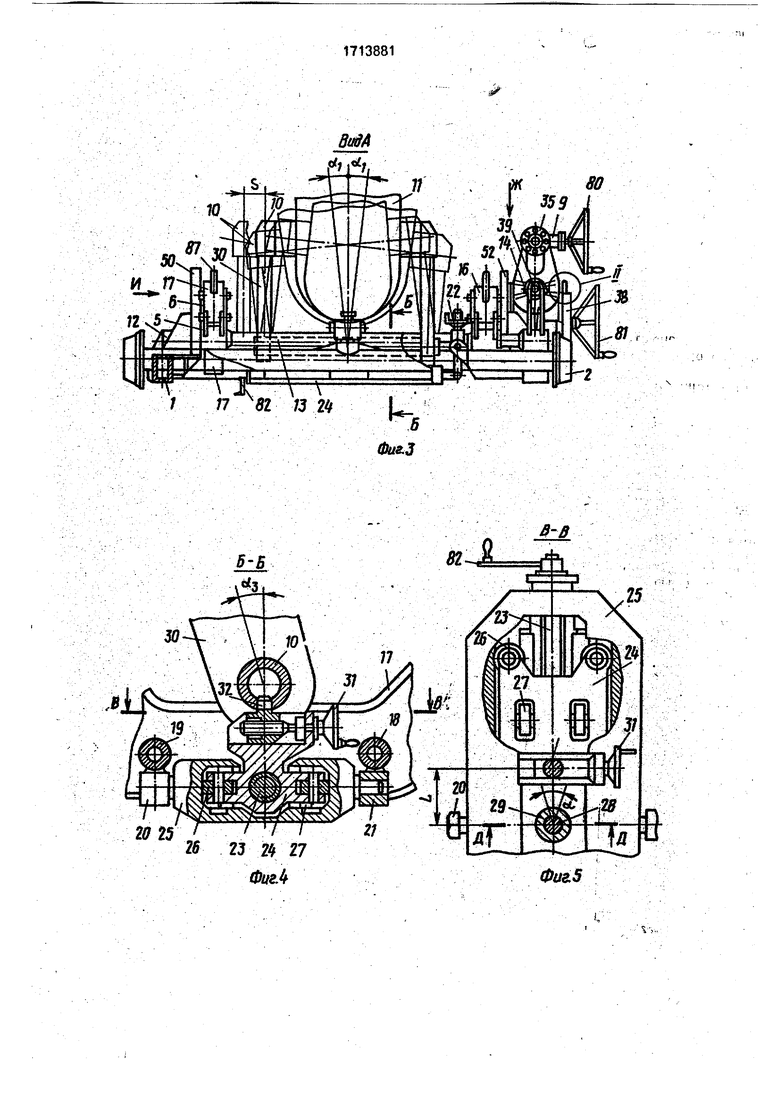
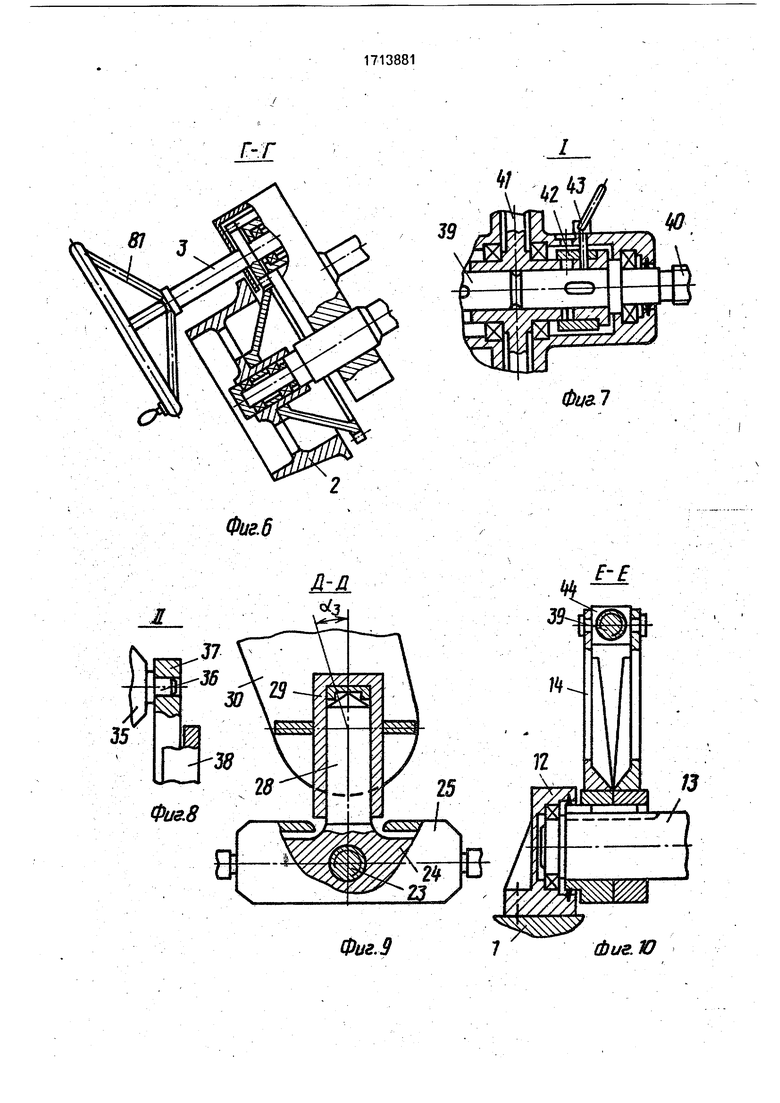
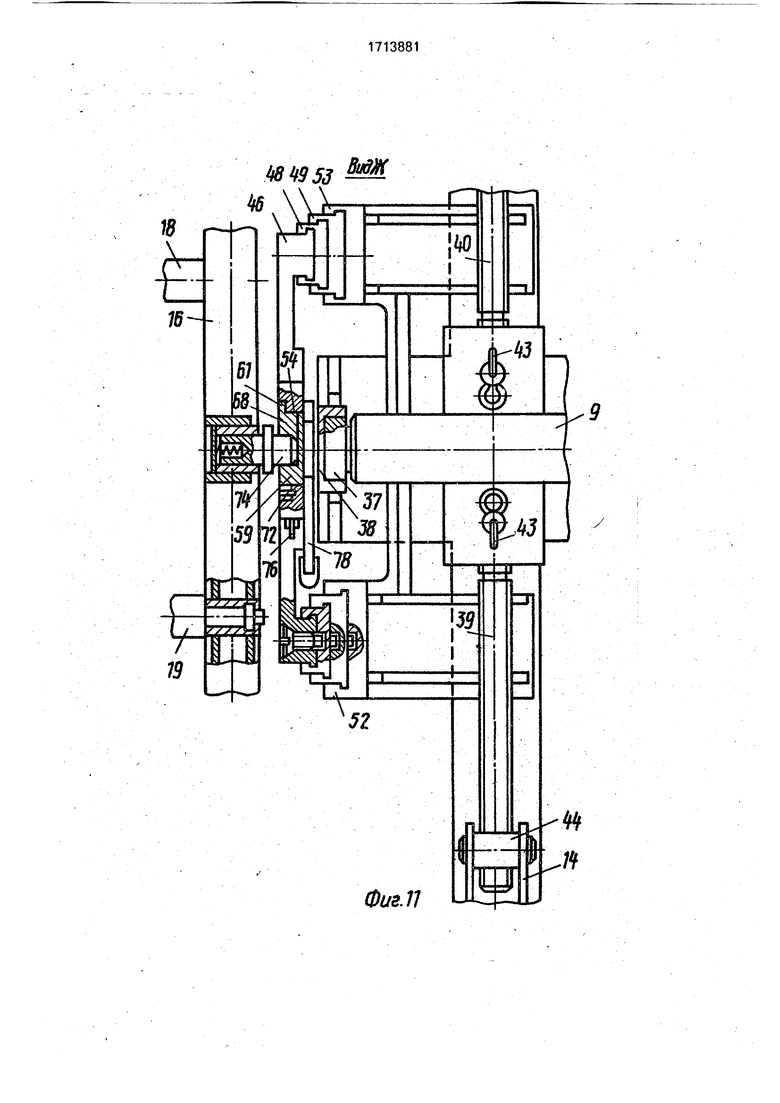
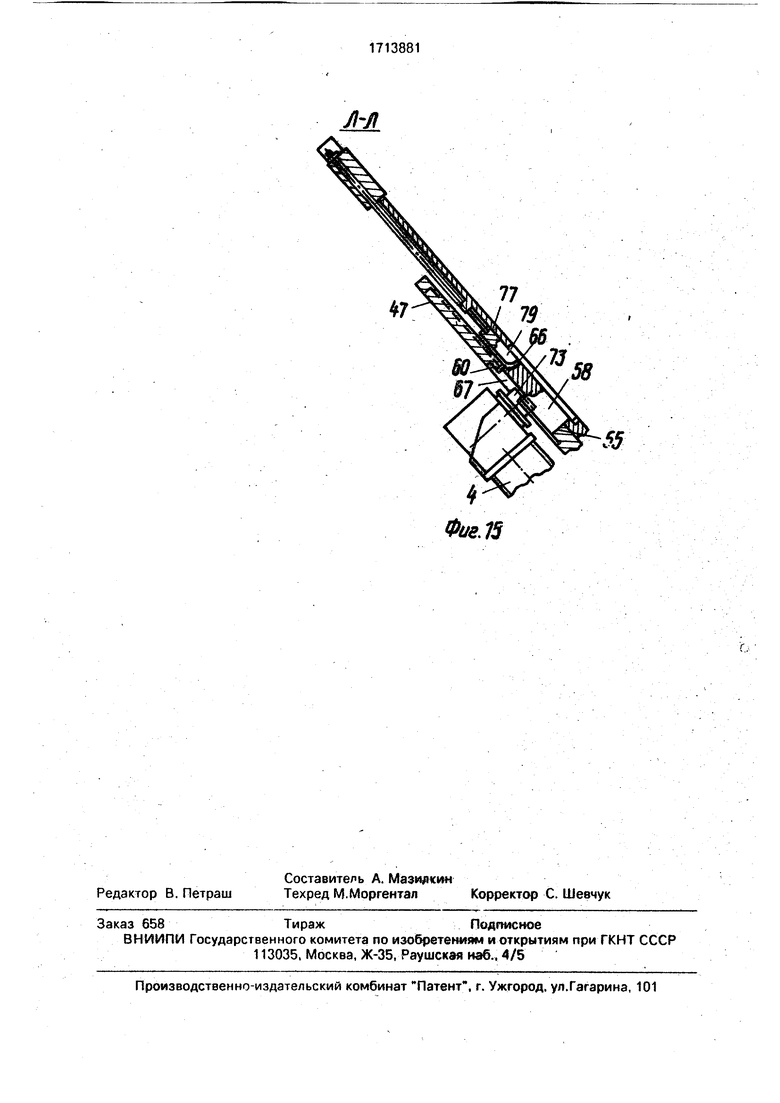
На фиг.1 показан агрегат, общий вид; на фиг.2 - кинематическая схема агрегата; на фиг,3 - вид А на фиг.1; на фиг.4 - сечение Б-Б на фиг.З; на ,фиг.5 - сечение В-В на фиг.4;на фиг.6 - сечение Г-Г на фиг.1,на фиг.7 узел I на фиг.1; на фиг.8-узел И на фиг.З; на фиг.9-сечение Д-Д на фиг.5; на фиг. 10- сечение на фиг.1; на фиг. 11 - вид Ж на фиг.З; на фиг. 12 - вид И на фиг.З; на фиг. 13 - схема увязки рукоятки переключения копира; на фиг.14 -сечение К-К на фиг,12; на фиг.15сечение Л-Л на фиг. 12.
Монтажно-стыковочный агрегат состоит из рамного основания 1 на колесном ходу 2 с приводом 3 перемещения, грузовой площадки 4, связанной с основанием 1 шарнирн-ыми парами рычагов 5,6 и 7,8, кинематически взаимодействующими друг с другом посредством силового привода 9. и грузозахватной траверсы 10 для удержа,ния и фиксации монтируемых грузов 11.
На верхних продольных торцах рамного основания 1 на равноудаленных расстояниях от поперечной оси симметрии основания размещены и закреплены шарнирно посредством цапф 12 поперечные валы 13, на которых жестко закреплены попарно консоли 14 и 15 и рычаги 5 и 7, установленные под острым углом а к рамному основанию 1 (фиг.1). Рычаги 5 и 7 наклонены в противоположные стороны друг от друга (возможен
вариант наклона рычагов навстречу друг другу.,
Консоли 14 и 15 И рычаги 5 и 7 закреплены на валах 13 жестко и образуют в совокупности конструкцию эквивалентную V-образным рычагам, как это схематично изображено на фиг,2. .
Грузовая площадка 4 выполнена в виде подвесной люльки, образованной соединением двух параллельно расположенных дугообразных балок 16 и 17, обращенных выпуклостями к рамному основанию 1 и жестко связанных между собой поперечными стержнями 18 и 19. На поперечных стержнях 18 и 19 шарнирно закреплена на втулках 20 и 21, установленных вдоль продольной оси основания 1, с возможностью крена на угол а (фиг.З) посредством вращения привода 22 и перемещения в одну и в другую
стороны на расстояние S посредством вращения винтового привода 23 каретка 24. Каретка 24 размещена в корпусе 25 и снабжена роликами 26 и 27, вертикально расположенной цапфой 28 под установку
опорного стакана 29 грузозахватной траверсы 10 с силовыми ребрами 30 и приводом 31 с пальцевым водилом 32, предназначенным для поворота грузоподъемной траверсы 10 вокруг вертикальной
цапфы 28 на угол «2 на плече L (фиг.5).
Относительно вертикальной оси цапфы 28 силовые ребра 30 траверсы 10 на опорном стакане 29 закреплены под острымуглом Ой (фиг.4), что позволяет расширить
угловой диапазон наклона грузозахватной траверсы 10 относительно вертикали на величину указанного угла оз. Пары рычагов 5,6 и 7,8 связаны между собой шарнирно
осями 33 и 34 соответственно.
Силовой привод 9 выполнен в виде многоступенчатого редуктора 35, который шарнирно закреплен на оси 36 и связан ползунами 37 с вертикальными направляющими 38, жестко связанными с рамным основанием 1 и размещенными, на средней части боковой балки рамного основания 1.
Редуктор 35 оснащен винтовыми штоками 39 и 40, размещенными на нем соосно с диаметрально противоположных сторон. Винтовые штоки 39 и 40 имеют нарезки противоположного направления и в исходном положении расположены горизонтально. Винтовые штоки 39 и 30 взаимодействуют с ведущей шестерней 41 редуктора 35 через муфты 42 сцепления с переключателями 43. Винтовые штоки 39 и 40 винтовыми нарезками взаимодействуют с гайками 44 и 45, шарнирно закрепленнц:ми на консолях 14 и 15.
Для обеспечения устойчивого положе,ния грузовой площадки 4 при подьемё и наклоне в ту или иную сторону монтажностыковочный агрегат оснащен установленными с двух противоположных сторон грузовой п.лощадки.4 направляющими копира, выполненного в виде двух вертикально расположенных рычагов 46 и 47, связанных посредством ползунов 48 и 49 с вертикальными попарно установленными и жестко прикрепленными к рамному основанию 1 стойками 50, 51 и 52, 53. В центральной части рычагов 46 и 47 образованы окна 54 и 55, а на лицевых сторонах рычагов 46 и 47, обращенных к грузовой площадке 4 , - дугообразные канавки 56 и 57, продольные оси которых сходятся и пересекаютря с центральной осью окон 54 и 55.
В окнах 54 и 55 смонтированы втулки 58 и 59 с ребордами 60 и 61 соответственно.
На внешних цилиндрических кромках втулок 58 и 59 и их ребордах 60 и 61 образованы сквозные радиальные пазы 6265 (фиг. 13), а на внешних цилиндрическ 1х кромках втулок 58 и 59 - радиальные вырезы 66. На лицевых торцах втулок 58 и 59, обращенных к грузовой площадке 4, образованы соответственно радиальные канавки 67 и 68, которые являются продолжением дугообразных канавок 56 и 57, однотипных по профилю с канавками 67 и 68.
На ребордах 60 и 61 втулок 58 и 59 образованы выступы 69 и 70, которые предназначены для ограничения угла поворота втулок 58 и 59. Ограничение угла поворота обеспечивается штифтами 71 и 72, установленными соответственно на рычагах 46 и 47. При этом штифты 71 и 72 установлены таким образом, чтобы в момент взаимодействия с ними выступов 69 или 70 обеспечивалось совмещение канавок 67 и 68, втулок 58 и 59 с дугообразными канавками 56 и 57 рычагов 46 и 47.
Дугообразные канавки 56 и 57 и радиальные канавки 67 и 68 предназначены для обеспечения заданного угла наклона грузовой площадки 4 при взаимодействии с под0 пружиненными пальцами 73 и 74, установленными н внешних боковых сторонах грузовой площадки 4. При этом в положении, когда грузовая площадка 4 находится в горизонтальном положении, продольные оси
5 пальцев 73 и 74 проходят через центры втулок 58 и 59 и окон 54 и 55 рычагов 46 и 47.
На рычагах 46- и 47 смонтированы защелки 75, входящие в зацепление с радиальными пазами 62-65 (фиг.13) при изменении углового положения втулок 58 и 59. Защелка 75 снабжена механическим приводом 76.
Совмещение дугообразных канавок 56 и 57 копира с радиал.ьными канавками 67 и 68
5 втулок 58 и 59 обеспечивается рукоятками 77 и 78 переключения, смонтированными шарнирно на втулках 58 и 59 соответственно. Рукоятки 77 и 78 снабжены подпружиненным фиксатором 79, входящим в
0 зацепление с радиальными вырезами 66 втулок 58 и 59. Количество вырезов 66 зависит от величины угла свободного вращения рукоятки 77 или 78, например на угол 04 (фиг, 12), и зон доступа к рукояткам 77 и 78.
5 Позициями 80-82 обозначены соотаетственно штурвалы силового привода 9, привода 3 перемещения колесного хода 2 и винтово.-о привода 23 перемещения каретки 24. Позицией 83 обозначена емкость, к
0 фланцу 84 которой по плоскости 85 присты-;
ковывается фланец 86 монтируемого груза 11. Позицией 87 обозначены такелажныеузлы агрегата.
Монтажно-стыковочный агрегат работает следующим образом.
В исходном состоянии грузовая площадка 4 агрегата занимает крайнее нижнее положение, при котором она находится в центре проема рамного основания 1, руко0 ятки 77 и 78 переключения копира находят- , ся в нейтральном положении, при этом радиальные канавки 67 и 68 втулок 58 и 59 направлены в сторону рамного основания 1, а винтовые штоки 39 и 40 входят в зацепление с валом ведущей шестерни 41 редуктора 35. На грузовую площадку 4 установлен и закреплен посредством грузозахватной траверсы 10 монтируемый груз 11.
0 Вращением штурвала 81 агрегат колесным ходом 2 подводится к объекту обслуживания, например к емкости 83 (фиг.1). Вращением штурвала 80 монтируемый груз 11 перемещается по вертикали до соприкоС1
5 новения фланцев 84 и 86. При несовмещении стыковочных фланцев 84 и 86 по стыковочной плоскости 85 совмещение их осуществляется вращением соответствуюих штурвалов 22, 31 и 80-82, а также упавлением рукоятками 77 и 78 переключеия копира. При этом обеспечивается: при ращении штурвала 81 продольное перемеение; при вращении штурвала 80 - вертиальное перемещение, причем рукоятки 77 78 переключения копира находятся в нейральном положении; при вращении штурала 82 - поперечное перемещение S; при вращелии штурвала 80 - наклон грузовой площадки 4 в сторону продольной оси агрегата, при этом рукоятки 77 и 78 переключения переводятся в крайнее положение или на заданный угол; при вращении штурвала 2 - наклон по крену при вращении штурвала31 -азимутальноеотклонение «а.
Рассмотрим, как наиболее характерные, вертикальное и наклонное перемещения грузовой площадки 4.
Вертикальное перемещение осуществляется вращением штурвала 80, при этом винтовые штоки 39 и 4U, взаимодействуя с вертикальными консолями 14 и 15, шарнирными парами рычагов 5,6 и 7,8 перемещают грузовую площадку 4 вверх. Устойчивое положение грузовой.площадки 4 обеспечивается направляющими , копира, выполненными в виде расположенных с двух противоположных сторон -грузовой площадки 4, рычагов 46 и 47, связанных посредством ползунов 48 и 49 с вертикальными попарно установленными и жестко прикрепленными к рамному основанию 1 стойками 50, 51 и 52, 53,
Вертикальность перемещения грузовой площадки 4 обеспечивается жестким в поперечном направлении креплением рычагов 46 и 47 к ползунам 48 (4)иг.11) и нейтральным положением втулок 58 и 59, при положении которых радиальные канавки 67 и 68, входящие в зацепление с подпружиненными пальцами 74 и 73 грузовой площадки 4, развернуты в сторону рамного основания 1,
Разворот втулок 58 и 59 осуществляется рукоятками 77 и 78 переключения соответственно, с использованием защелок 75, обеспечивающих фиксацию втулок 58 и 59 в рычагах 46 и 47 копира при переводе подпружиненного фиксатора 79 рукояток 77 и 78, например, с одного радиального выреза 66 а последующий (фиг. 13) и т.д.
При вращении штурвала 80 винтовые штоки 39 и 40 придают угловой разворот консолям 14 и 15, а следовательно, перемещают по вертикали силовой привод 9. Перемещение привода 9 по вертикали обеспечивается ползунами 37, размещенными в вертикальных направляющих 38, жестко связанных с рамным основанием 1 (фиг.2,3,8и 11).
Наклон грузовой площадки 4 в вертикальной продольной плоскости (тонкие контурные линии, фиг.1) осуществляется следующим образом..;
Бинтовой шток 39 выводится из зацепления с ведущей шестерней 41 редуктора 35 (фиг.2), втулки 58 и 59 копира рукоятками 77
0 и 78 переключения соответственно устанавливаются в такое положение, при котором выступы 69 реборд 60 и 61 соответствующих втулок 58 и 59 вступают в соприкосновение со штифтами 71 и 72. При этом радиальные
5 канавки 67 и 68 соответствующих втулок 58 и 59 и дугообразные канавки 56 и 57 рычагов 46 и 47 копира совмещаются, чем обеспечивается свободное перемещение подпружиненных пальцев 73 и 74 грузовой площадки
0 4 по дугообразным канавкам 56 и 57 копира, а следовательно, и необходимые продольные наклоны в ту или иную сторону грузовой Площадки 4 агрегата.
При вращении рукояток 77 и 78 переключения их фиксация с рычагами 46 и 47 копира осуществляется подпружиненными защелками 75 с механическим приводом 76 (фиг.12).
Продольный наклон в противоположную сторону осуществляется аналогичным образом, но при этом от редуктора 35 отключается винтовой шток 40, а втулки 58 и 59 проворачиваются в противоположную сторону до соприкосновения выступа 70 реборд 60 и 61 соответствующих втулок 58 и 59 с штифтами 71 и 72 соответственно.
После завершения заключительной операции по совмещению торцов фланцев 84 и 86 емкости 83 и монтируемого груза 11 и их
0 состыковки производится отстыковка грузозахватной траверсы 10 от монтируемого груза 11, монтажно-стыковочный агрегат переводится в исходное положение и отводится от емкости 83 для подготовки последующей технологической операции. Формула изобретения 1. Монтажно-стыковочный агрегат, содержащий основание с ходовыми колесами, две пары нижних рычагов, каждая из которых одними концами валов шарнирно связана с основанием, две пары верхних рычагов, одними концами шарнирно связанных с другими концами соответствующих нижних рычагов, грузовую площадку,
5 шарнирно Связанную с другими концами верхних рычагов, привод подьема грузовой площадки, отличающийся тем, что, с целью обеспечения высокой точности позиционирования груза в широком диапазоне углов наклона стыкуемых поверхностей и
снижения трудоёмкости монтажа при обслужив нии различных видов грузов, грузовая площадка выполнена в виде подвесной люльки, образованной соединением двух параллельно расположенных дугообразных балок, обращенных выпуклостью к основанию и жестко связанных между собой поперечными стерзкнями, привод подъема грузовой площадки выполнен в виде шарнирно закрепленного на вертикальных направляющих основания редуктора с противоположно направленными и соосно расположенными выходными валами, соединенными муфтами сцепления с винтами, |/1мею1цими резьбу противоположного напрэвлёния и ввинченными в гайки, шарнирно смонтированные на консолях, жестко закрепленных на валах каждой п;ары нижnar isпжшттзк з , ,.„..:-,:-... ,
них рычагов, при этом на боковых торцах люльки расположены подпружиненные пальцы, входящие в зацепление с копирами, установленными по обе стороны люльки параллельно друг другу, связанными посредством ползунов с направляющими вертикальных стоек основания, на Kopviiiiax размещены взаимодействующие с жиненными пальцами профилированные
канавки..
W
Фаз.
Фиг,6 Фиг.8 Фиг.9 (tus. Ю
5j
Фиг.11 дЛ. 15511B 7
79
Фиг. 15 ВидИ ФигП
Фиг. П
| Домкрат | 1983 |
|
SU1150219A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
