В основном авт. св. № 161145 описано устройство для синтеза управляющих воздействий на объект, описываемый линейным дифференциальным уравнением п-го порядка с неположительными действительными корнями, содержащее блок для получения гиперповерхности, блок формирования знака управления и блок задания координат, связанный с (п--1) моделями, описывающими поведение объекта в «обращенном времени.
Предлагаемое устройство отличается от известного тем, что, с целью осуществления синтеза управляющих воздействий для оптимального управления объектом, описываемым линейным дифференциальным уравнением второго порядка с произвольными корнями характеристического уравнения при одном, ограниченном по модулю управляющем воздействии, к блоку, моделирующему уравнение объекта, записанное для «отрицательного времени, подключен блок синтеза оптимальной кривой переключения.
Блок синтеза оптимальной кривой переключения содержит нелинейный преобразователь, служащий для преобразования координаты Xj, модели на фазовой плоскости модели к
модели к координате X оптимальной кривой переключения блок синтеза содержит запоминающие и суммирующие устройства и ключевые схемы. Выход блока синтеза подключен ко входу блока синтеза оптимального управления объектом.
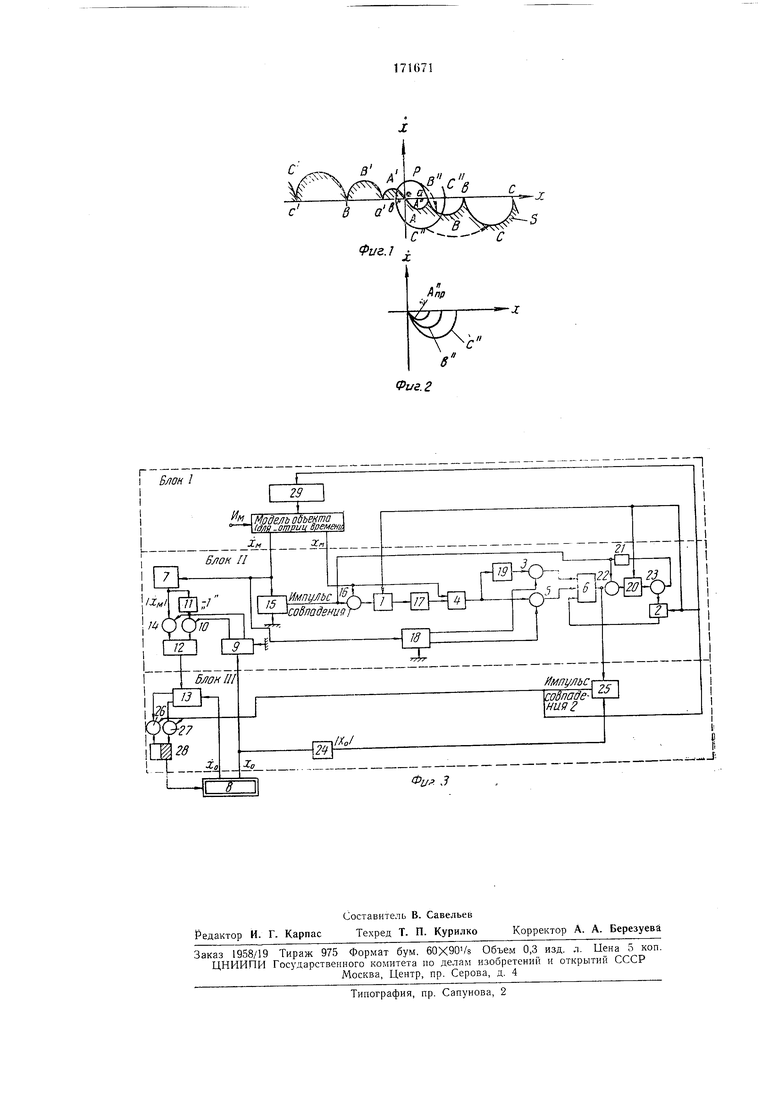
На фиг. 1 показан процесс построения оптимальной кривой переключения из фазовой траектории регулируемого объекта; на фиг. 2
изображены преобразованные дуги фазовой траектории регулируемого объекта на выходе первой части блока П описываемого устройства; на фиг. 3 изображена блок-схема описываемого устройства.
Первая дуга А оптимальной кривой S переключения является просто дугой А фазовой траектории Р объекта.
Дуга В оптимальной кривой S симметрична относительно точки а дуге В фазовой
траектории Р объекта. Дуга С получается сдвигом по оси /Y дуги С фазовой траектории Р объекта. Аналогично производится построение остальных дуг оптимальной кривой переключения S из фазовой траектории Р объекта
вправо по оси X. Оптимальная кривая переключения влево по оси X симметрична построенной относительно начала координат О.
вается уравнением объекта, записанным для «отрицательного времени. Фазовой траекторией модели является кривая Р на фиг. 1.
Блок // устройства на основе описанного выше алгоритма синтезирует из фазовой траектории Р оптимальную кривую переключения.
Когда фазовая траектория модели описывает дугу А, то выходные напряжения фиксаторов 1 VL 2 равны нулю, ключ 3 заперт и координата x,,i фазовой траектории модели через суммирующий усилитель 4 и ключ 5 поступает на вход суммирующего усилителя 6. Напряжение на выходе усилителя 6 повторит выход модели, что даст координату х дуги А оптимальной кривой переключения.
Координата лг модели подается на нелинейный преобразователь 7, на выходе котол:„|, Если текущая рого получается величина
выходная координата объекта 8 л;о О, то схема сравнения 9, определяющая знак Хо,
открывает ключ 10, и величина лг , преобразованная инвертирующим усилителем 11 в
- UM , поступает на вход суммирующего усилителя /2 и далее на схему сравнения 13. При. открывается ключ 14 и на вход усилителя 12
л.ч|, идущая далее на
поступает величина
схему сравнения 13. Таким образом, на схему сравнения 13 поступает значение координаты
X иеобходимой половины оптимальной кривой переключения в зависимости от положения на фазовой плоскости, изобрал ающей точки объекта. Дальнейшее преобразование происходит следующим образом. В конце первой дуги Р, в момент иересечения ею оси X, схема совпадения 15 выдает импульс, открывающий ключ 16, и значение л;„ запоминается на фиксаторе /. Напряжение с фиксатора / через инвертирующий усилитель 17 подается на вход усилителя 4, осуществляя перенос начала координат в точку а (см. фиг. 1).
При ;с,,, О схема сравнения 18, определяющая знак лГм , открывает ключ 3 (запирая одновременно ключ 5), и наиряжение с выхода усилителя 4 через инвертирующий усилитель 19 и ключ 3 поступает на вход усилителя 6. Таким образом, выходные напряжения ключа 3 и усилителя 12 при .to О опишут траекторию В (см. фиг. 2).
При достижении фазовой траекторией модели точки в (см. фиг. 1) фиксатор / запоминает значение Xj, , соответствующее точке в, а выходные напряжения ключа 5 и усилтеля 12 опишут траекторию С (см. фиг. 2) и т. д. Операция приплюсовывания координаты X дуг А, В, С и т. д. осуществляется схемой, состоящей из усилителя 6, фиксаторов 20 и 2, унивибратора (одноиолупериодного
мультивибратора) 21 и ключей 22 и 23. Таким образом, на выходе усилителя 6 получается координата х правой половины оптимальной кривой переключения, наличие которой достаточно для синтеза оптимального
управления объектом. При этом координата л-о объекта 8 через нелинейный преобразователь 24, преобразующий .о в | Хо( подается на схему совпадения 25. В момент совпадения координат Хо объекта и х оптимальной
кривой переключения схема сравнения 13
определяет знак разности между Х(, объекта и
л оптимальной кривой переключения. В за-висимости от знака этой разности открывается
один из ключей 26 и 27, и импульс от схемы совпадения 25 поступает на триггер 28. Положение триггера определяет знак х для оптимального управления объектом.
Импзльс от схемы совпадения 25 через схему сброса 29 возвращает модель к началу координат, а также устанавливает фиксаторы 1, 2 н 20 в нулевое положение.
Предмет изобретения
Устройство для синтеза управляющих воздействий на объект, описываемый линейным дифференциальным уравнением, по авт. св. № 161145, отличающееся тем, что, с целью
осуществления синтеза оптимального управления объектом, описываемым линейным дифференциальным -равнением второго норядка с произвольными корнями характеристического уравнения, к блок), моделирующему уравнение объекта, записанное для «отрицательного времени, подключен блок синтеза оптимальной кривой переключения, содержащий нелинейный преобразователь, запоминающие и суммирующие устройства и ключевые схемы,
выход блока синтеза оптимальной кривой переключения подключен ко входу блока синтеза оптимального управления объектом.
и-JT
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| УСТРОЙСТВО для СИНТЕЗА ОПТИМАЛЬНЫХ УПРАВЛЯЮЩИХ | 1972 |
|
SU341013A1 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| Устройство для защиты бурильной колонны от обрывов и скручиваний | 1985 |
|
SU1263823A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| УСТРОЙСТВО ТРАЕКТОРНОГО, ОПТИМАЛЬНОГО ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 2000 |
|
RU2199775C2 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
.
