Изобретение относится к области электротехники и может быть использовано в электроприводах с упругими механически-, ми связями с механизмами, характеризующимися изменением параметров, например, в электроприводах промышленных роботов.
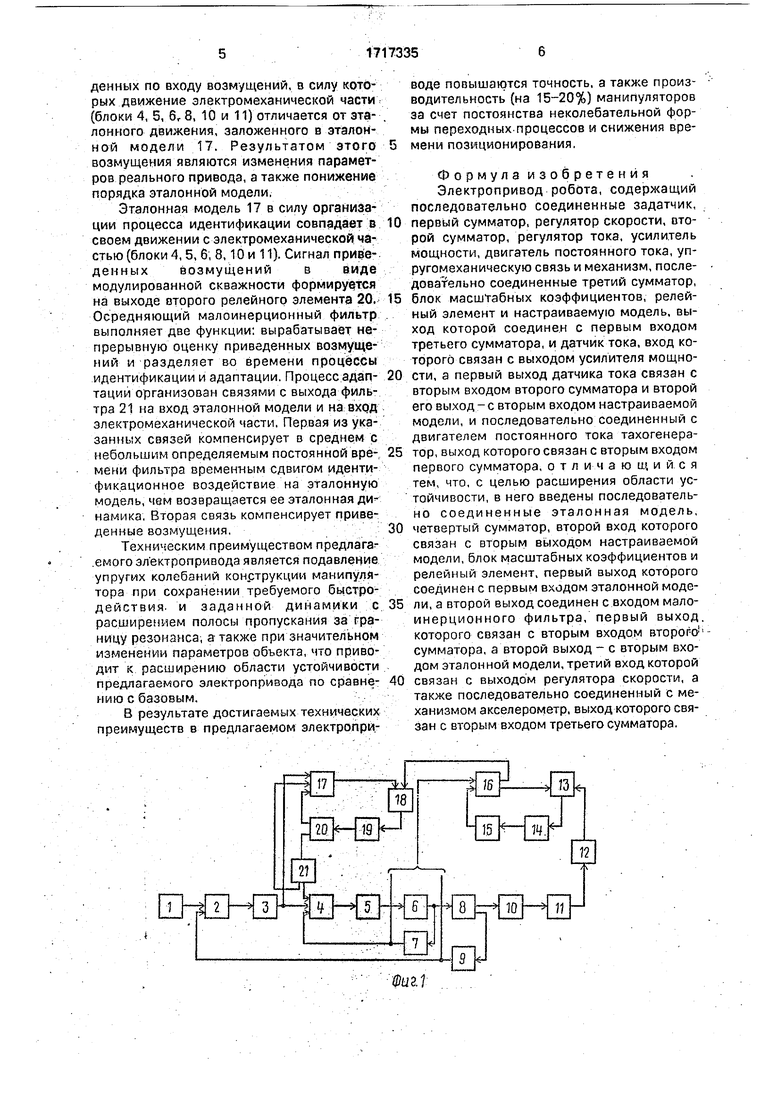
Целью изобретения является расширение области устойчивости электропривода робота с упругими механическими связями, с механизмами, характеризующимися зна чительным изменением момента инерции и жесткости упругой связи.. На фиг. 1 изображена структурная схе ма предлагаемого электропривода робота; на фиг. 2 - пример реализации.
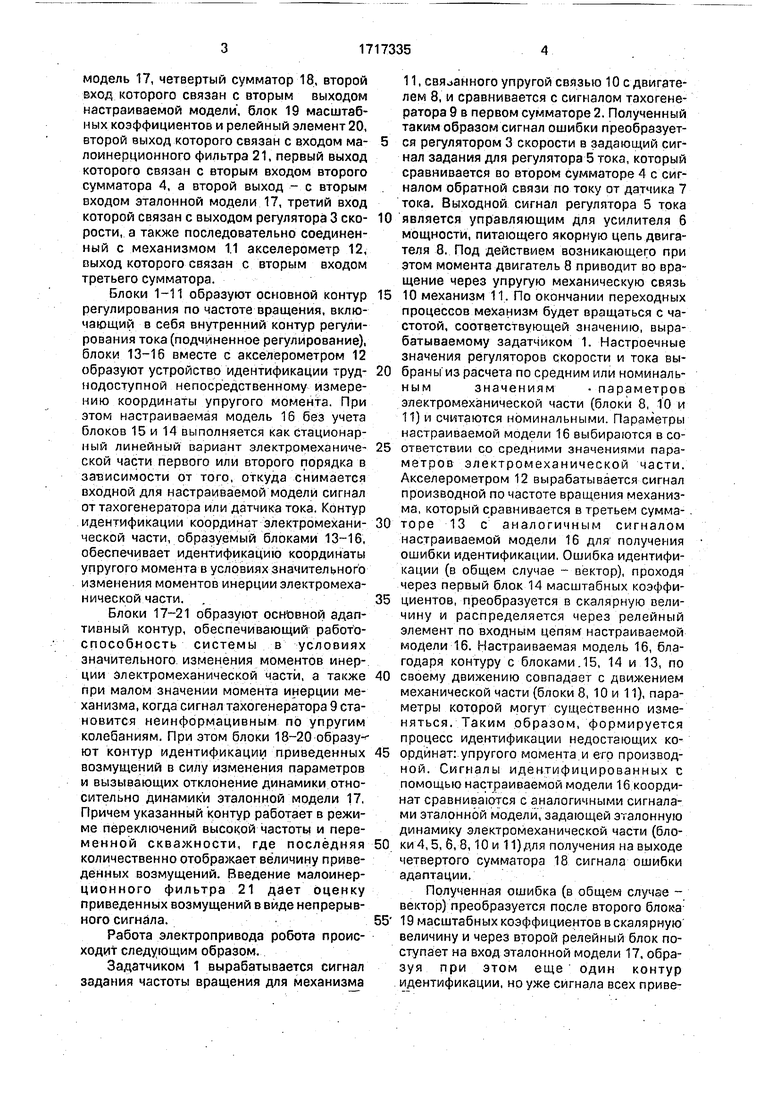
Электропривод робота содержит последовательно .-соединенные задатчик 1,пер- вый сумматор 2, регулятор 3 скорости,
второй сумматор 4, регулятор 5 тока, усилитель 6 мощности, датчик 7 тока, двигатель 8 постоянного тока, тахогенератор 9, упруго- механическую связь 10, механизм 11, акселерометр 12 и последовательно соединенные третий сумматор 13, блок 14 масштабных коэффициентов, релейный элемент 15 и настраиваемую модель 16, выход которой соединен с первым входом третьего сумматора 13, и датчик тока 7, вход которого связан с выходом усилителя 6 мощности, а первый выход датчика 7 тока связан с вторым входом второго сумматора 4 и второй его выход - с вторым входом настраиваемой модели 16, последовательно соединенный с двигателем 8 постоянного тока тахогенератор 9, выход которого связан с вторым входом первого сумматора 2, а также последовательно соединенные эталонную
XJ
W
модель 17, четвертый сумматор 18, второй вход которого связан с вторым выходом настраиваемой модели, блок 19 масштабных коэффициентов и релейный элемент 20, второй выход которого связан с входом малоинерционного фильтра 21, первый выход которого связан с вторым входом второго сумматора 4, а второй выход - с вторым входом эталонной модели 17, третий вход которой связан с выходом регулятора 3 скорости, а также последовательно соединенный с механизмом 1.1 акселерометр 12, выход которого связан с вторым входом третьего сумматора.
Блоки 1-11 образуют основной контур регулирования по частоте вращения, включающий в себя внутренний контур регулирования тока (подчиненное регулирование), блоки 13-16 вместе с акселерометром 12 образуют устройство идентификации труднодоступной непосредственному измерению координаты упругого момента. При этом настраиваемая модель 16 без учета блоков 15 и 14 выполняется как стационарный линейный вариант электромеханической части первого или второго порядка в зависимости от того, откуда снимается входной для настраиваемой модели сигнал от тахогенератора или датчика тока. Контур идентификации координат электромеханической части, образуемый блоками 13-16, обеспечивает идентификацию координаты упругого момента в условиях значительного изменения моментов инерции электромеханической части.
Блоки 17-21 образуют основной адаптивный контур, обеспечивающий работоспособность системы в условиях значительного, изменения моментов инер-. ции электромеханической части, а также при малом значении момента инерции механизма, когда сигнал тахогенератора 9 становится неинформацивным по упругим колебаниям. При этом блоки 18-20 образу- ют контур идентификации приведенных возмущений в силу изменения параметров и вызывающих отклонение динамики относительно динамики эталонной модели 17, Причем указанный контур работает в режиме переключений высокой частоты и переменной скважности, где последняя количественно отображает величину приведенных возмущений. Введение малоинерционного фильтра.21 дает оценку приведенных возмущений в виде непрерывного сигнала.
Работа электропривода робота происходит следующим образом.
Задатчиком 1 вырабатывается сигнал задания частоты вращения для механизма
11, связанного упругой связью 10 с двигателем 8, и сравнивается с сигналом тахогенератора 9 в первом сумматоре 2. Полученный таким образом сигнал ошибки преобразуется регулятором 3 скорости в задающий сигнал задания для регулятора 5 тока, который сравнивается во втором сумматоре 4 с сигналом обратной связи по току от датчика 7 тока. Выходной сигнал регулятора 5 тока
0 является управляющим для усилителя 6 мощности, питающего якорную цепь двигателя 8. Под действием возникающего при этом момента двигатель 8 приводит во вращение через упругую механическую связь
5 10 механизм 11. По окончании переходных процессов механизм будет вращаться с частотой, соответствующей значению, вырабатываемому задатчиком 1. Настроечные значения регуляторов скорости и тока вы0 браны из расчета по средним или номинальны мзначениям -параметров электромеханической части (блоки 8, 10 и 11) и считаются номинальными. Параметры настраиваемой модели 16 выбираются в со5 ответствии со средними значениями параметров электромеханической части. Акселерометром 12 вырабатывается сигнал производной по частоте вращения механизма, который сравнивается в третьем сумма0 торе 13 с аналогичным сигналом настраиваемой модели 16 для получения ошибки идентификации. Ошибка идентификации (в общем случае - вектор), проходя через первый блок 14 масштабных коэффи5 циентов, преобразуется в скалярную величину и распределяется через релейный элемент по входным цепям настраиваемой модели 16. Настраиваемая модель 16, благодаря контуру с блоками. 15, 14 и. 13, по
0 своему движению совпадает с движением механической части (блоки 8, 10 и 11), параметры которой могут существенно изменяться. Таким образом, формируется процесс идентификации недостающих ко-5 ординат: упругого момента и его производной. Сигналы идентифицированных с помощью настраиваемой модели 16 координат сравниваются с аналогичными сигналами эталонной модели, задающей эталонную динамику электромеханической части (бло0 ки4,5, б, 8,10 и 11) для получения на выходе четвертого сумматора 18 сигнала ошибки адаптации.
Полученная ошибка (в общем случае - вектор) преобразуется после второго блока5 19 масштабных коэффициентов в скалярную величину и через второй релейный блок поступает на вход эталонной модели 17, образуя при этом еще один контур идентификации, но уже сигнала всех приведенных по входу возмущений, в силу которых движение электромеханической части (блоки 4, 5, 6Г8, 10 и 11) отличается от эта- лонного движения, заложенного в эталонной модели 17. Результатом этого возмущения являются изменения параметров реального привода, а также понижение порядка эталонной модели,
Эталонная модель 17 в силу организации процесса идентификации совпадает в своем движении с электромеханической частью (блоки 4,5, 6, 8,10 и 11). Сигнал приве- деиных возмущений в виде модулированной скважности формируется на выходе второго релейного элемента 20. Осредняющий малоинерционный фильтр выполняет две функции: вырабатывает непрерывную оценку приведенных возмущений и разделяет во времени процессы идентификации и адаптации. Процесс адап- тации организован связями с выхода фильтра 21 на вход эталонной модели и на вход электромеханической части. Первая из указанных связей компенсирует в среднем с небольшим определяемым постоянной вре- мени фильтра временным сдвигом идентификационное воздействие на эталонную модель, чем возвращается ее эталонная динамика, Вторая связь компенсирует приведенные возмущения,
Техническим преимуществом предлагаемого электропривода является подавление упругих колебаний конртрукции манипулятора при сохранении требуемого быстродействия, и заданной динамики с расширением полосы пропускания за границу резонанса, а-также при значительном изменении параметров объекта, что приводит к расширению области устойчивости предлагаемого электропривода по сравне- нию с базовым.
В результате достигаемых технических преимуществ в предлагаемом электроприводе повышаются точность, а также производительность (на 15-20%) манипуляторов за счет постоянства неколебательной формы переходных.процессов и снижения времени позиционирования.
Формула изобретения Электропривод робота, содержащий последовательно соединенные задатчик, первый сумматор, регулятор скорости, вто- рой сумматор, регулятор тока, усилитель мощности, двигатель постоянного тока, уп- ругомеханическую связь и механизм, последовательно соединенные третий сумматор, блок масштабных коэффициентов, релейный элемент и настраиваемую модель, выход которой соединен с первым входом третьего сумматора, и датчик тока, вход которого связан с выходом усилителя мощности, а первый выход датчика тока связан с вторым входом второго сумматора и второй его выход-с вторым входом настраиваемой модели, и последовательно соединенный с двигателем постоянного тока тахогенера- тор, выход которого связан с вторым входом первого сумматора, о т л и ч з ю щ и и. с я тем, что, с целью расширения области устойчивости, в него введены последовательно соединенные эталонная модель, четвертый сумматор, второй вход которого связан с вторым выходом настраиваемой модели, блок масштабных коэффициентов и релейный элемент, первый выход которого соединен с первым входом эталонной модели, а второй выход соединен с входом малоинерционного фильтра, первый выход, которого связан с вторым входом второг-о1 сумматора, а второй выход - с вторым входом эталонной модели, третий вход которой связан с выходом регулятора скорости, а также последовательно соединенный с механизмом акселерометр, выход которого связан с вторым входом третьего сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
Изобретение относится к электротехнике. Цель изобретения - расширение области устойчивости электропривода робота с упругими механическими связями с механизмами, характеризующимися значительным изменением момента инерции и жесткости упругой связи. В систему, состоящую из электропривода, механизма с упругой связью, а также контура идентификации упругого момента, введены блоки контура адаптации и акселерометр, установленный на механической части робота. Введенные блоки вырабатывают оценку приведенных возмущений, возникающих в силу изменений параметров механической части, Полученная оценка используется в качестве компенсирующего воздействия, возвращая электроприводу заданную (эталонную) динамику. При значительных изменениях параметров механической части компенсирующей связью создается адаптивный эффект, чем и достигается расширение области устойчивости и повышение стабильного функционирования электро-- привода робота. 2 ил.
J
| Система управления | 1983 |
|
SU1120283A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
