Изобретение относится к вспомогательным складским грузоподъемным устройствам, в частности к уравнивающим мостикам, соединяющим погрузочно-разгрузочную рампу склада с полом транспортного средства, например железнодорожного вагона, и позволяющим компенсировать большую разницу высот рампы и пола железнодорожного вагона (автомобиля) и обеспечить въезд погрузчика с грузом в транспортное средство с рампы и обратно.
Известен уравновешивающий мостик, содержащий тележку, две платформы, установленные на тележке с возможностью поворота вокруг горизонтальной оси, и средство для облегчения поворота платформ, выполненное в виде торсионов, кинематически связанных с платформами и тележкой (см. авт.св. Me 1096370, кл. В 65 G 69/28, 1984).
Использование известного техническо- то решения для поворота платформ мостиков с приложением незначительных усилий посредством применения в конструкции мостика торсиона, аналогичного торсионам подвески автомобилей, не может быть принято в конструкции мостиков шириной 1,5-2 м из-за значительной длины торсионоа (9- 10 м), которая вытекает из необходимости поворота платформы на 90-100°, и угла закручивания торсионов около 11° на 1 пог.м.
Х|
сл о
(см. Серебренников Н.Ю. Детали машин, М.: Воениздат, 1960, с.142). Там же
-GI7 где р- угол закручивания;
G - модуль упругости;
ф - полярный момент инерции.
Известен также уравновешивающий мостик, содержащий закрепленные вдоль рампы направляющие, каретку, снабженную системой ходовых роликов, установленную с возможностью перемещения на указанных роликах по направляющим, две платформы, установленные на каретке с возможностью поворота вокруг горизонтальной оси, и средство для облегчения поворота по меньшей мере одной платформы, выполненное в виде системы кинематически связанных с платформой пружин (см. проспект фирмы ANCRA JUNGFALK, ФРГ).
Данное техническое решение наиболее близко к описываемому изобретению по технической сущности и достигаемому эффекту.
Конструктивные элементы известного уравновешивающего мостика, закрепленного на торце рампы, выступают за ее пределы в сторону транспортного средства на 220-250 мм (в нерабочем состоянии мостика). Это не имеет значения для автомобильных рамп, но неприемлемо из соображений техники безопасности для железнодорожных, где установлены жесткие габариты приближения железнодорожных путей к строениям, сливно-наливным, погрузочно- разгрузочным устройствам, выдвижным и откидным каткам, транспортерам и другим устройствам, связанным с грузовыми операциями в нерабочем положении (см. Анин- ский Б.А. Погрузочно-разгрузочные работы, Л.: Машиностроение, 1968, с. 168 и Справочник проектировщика, Промышленный транспорт, т.1, М.: Стройиздат, 1972, с. 148). Снизить толщину выступающих элементов либо установить их на горизонтальной поверхности рампы невозможно, так как, например, диаметр пружины кручения около 150 мм, а кроме того, имеется ряд дополнительных элементов (косынки крепления и закрутки пружины, рычаг, каретка с катками, направляющая и т.д.).
Кроме того, при больших, габаритах мостиков, обусловленных высоким перепадом уровней и шириной дверей, вагонов, необходимы пружины кручения значительных параметров. В частности, расчеты показывают, что диаметр пружины из проволоки
22 - 25 мм должен быть 150 мм. Это достаточно трудоемко, так как требуются специальные условия для их изготовления. Надежность и долговечность таких пружин
в эксплуатации недостаточна.
Таким образом, в случае использования известного уравнивающего мостика для обустройства железнодорожных рамп не обеспечивается техника безопасности дви-
жения вагонов и локомотивов, так как элементы мостика выступают на большое расстояние за пределы рампы и возможно задевание подвижного состава за элементы мостика. Кроме того, поскольку одна из
платформ известного мостика не снабжена пружиной, облегчающей поворот платформы вручную, пользоваться мостиком неудобно.
Цель изобретения - повышение техники
безопасности и удобства пользования.
Указанная цель достигается тем, что уравнивающий мостик, содержащий закрепленные вдоль рампы направляющие, каретку, снабженную системой ходовых роликов, установленную с возможностью перемещения на роликах по направляющим, две платформы, установленные на каретке с возможностью поворота вокруг горизонтальной оси, и средство для облегчения поворота по меньшей мере одной платформы, выполненное в виде системы кинематически связанных с платформой пружин, снабжен установленной на каретке с возможностью вертикального перемещения
горизонтальной траверсой, система пружин образована винтовыми цилиндрическими пружинами сжатия, размещенными вертикально между кареткой и траверсой, траверса соединена тросами с одной из платформ,
причем указанное средство снабжено опирающимся на пружину по меньшей мере одним стержнем, предназначенным для взаимодействия с другой платформой, а также тем, что система ходовых роликов образована по меньшей мере, двумя парами соосных роликов, причем на боковой поверхности одного из роликов каждой пары выполнен кольцевой желоб для взаимодействия с профилированной направляющей, другой ролик размещен междудвумягоризонтальныминаправляющими, а направляющие закреплены на горизонтальной поверхности рампы.
Признаки, описанные в отличительной части формулы, в известных технических решениях не обнаружены, и, следовательно, предлагаемое техническое решение обладает существенными отличиями.
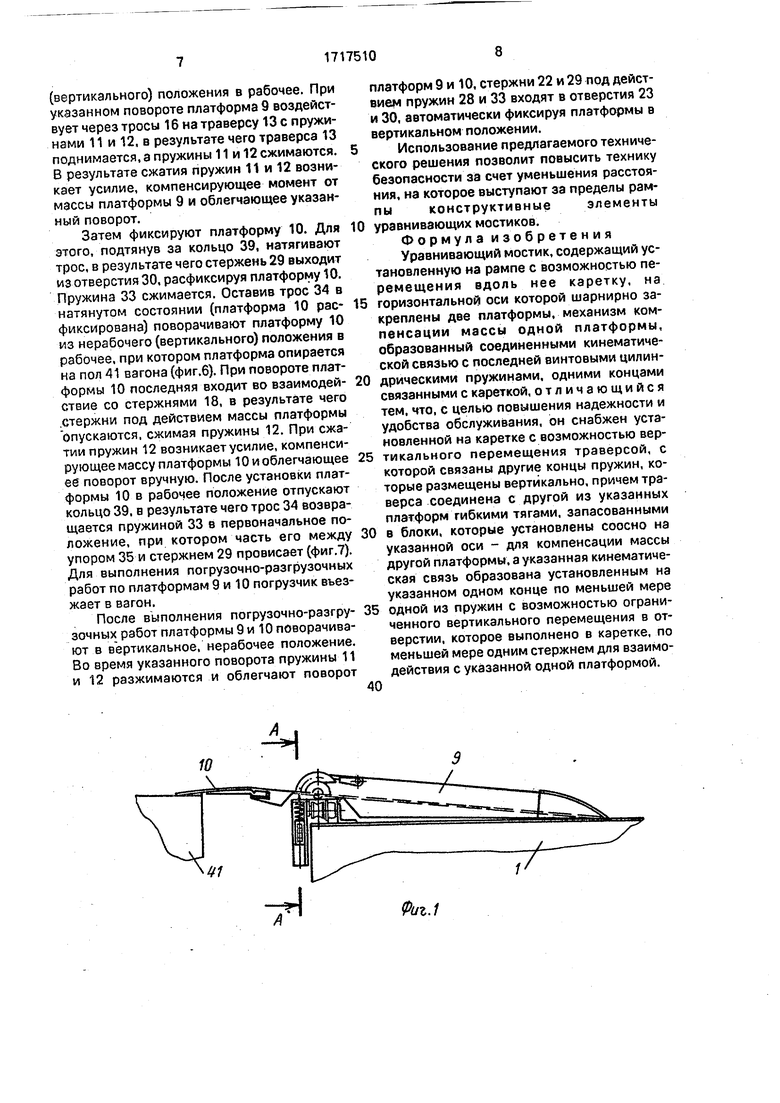
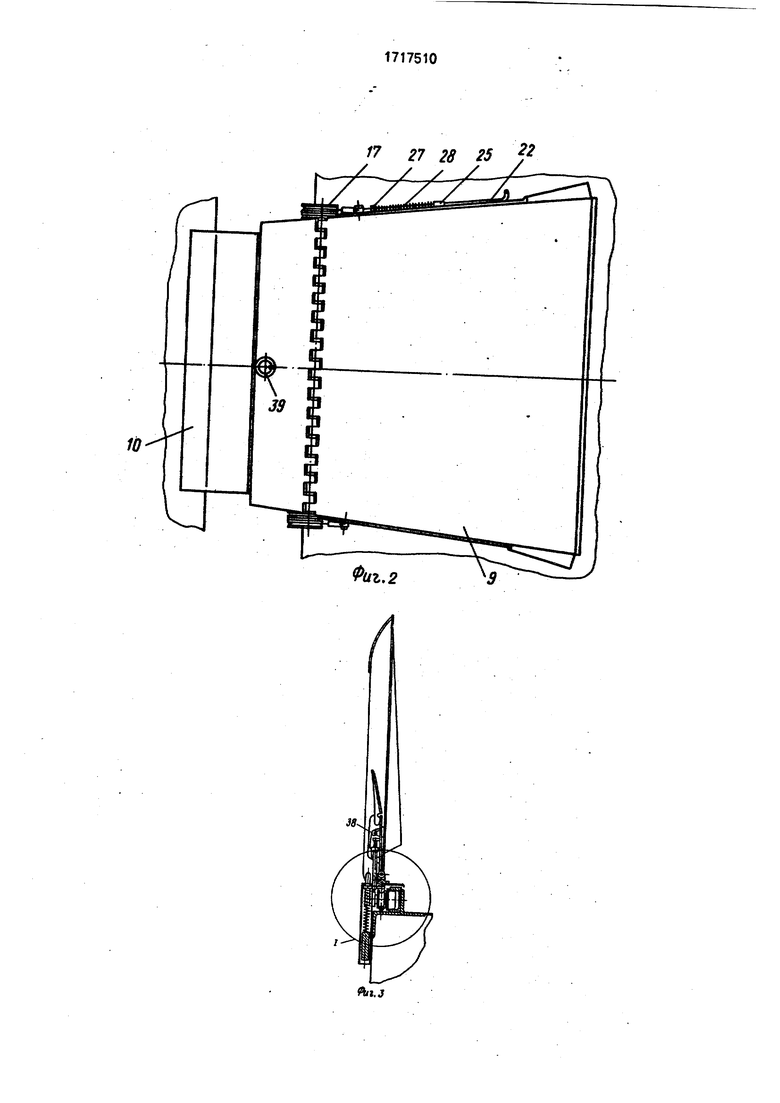
На фиг.1 изображен общий вид уравновешивающего мостика (в рабочем положении, фиксаторы условно не показаны); на фиг,2 - то же, вид сверху; на фиг.З изображен уравновешивающий мостик в нерабочем положении; на фиг.4 - вид I на фиг.З (платформа 9 условно не показана); на фиг.5
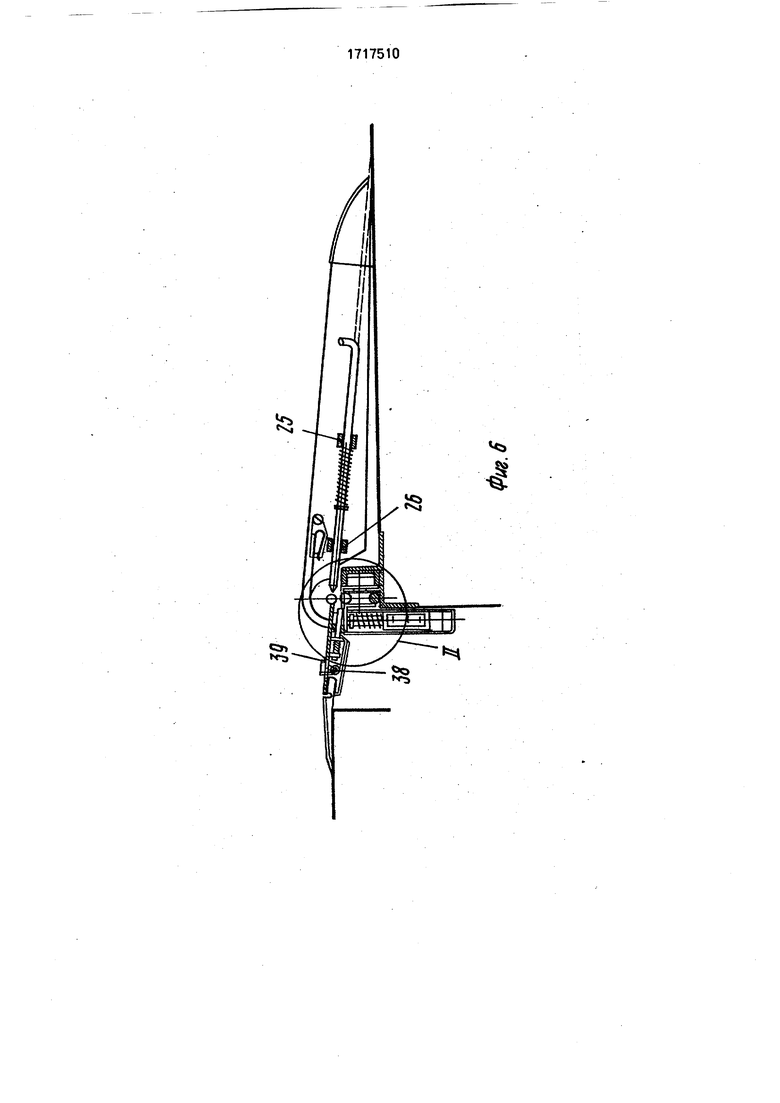
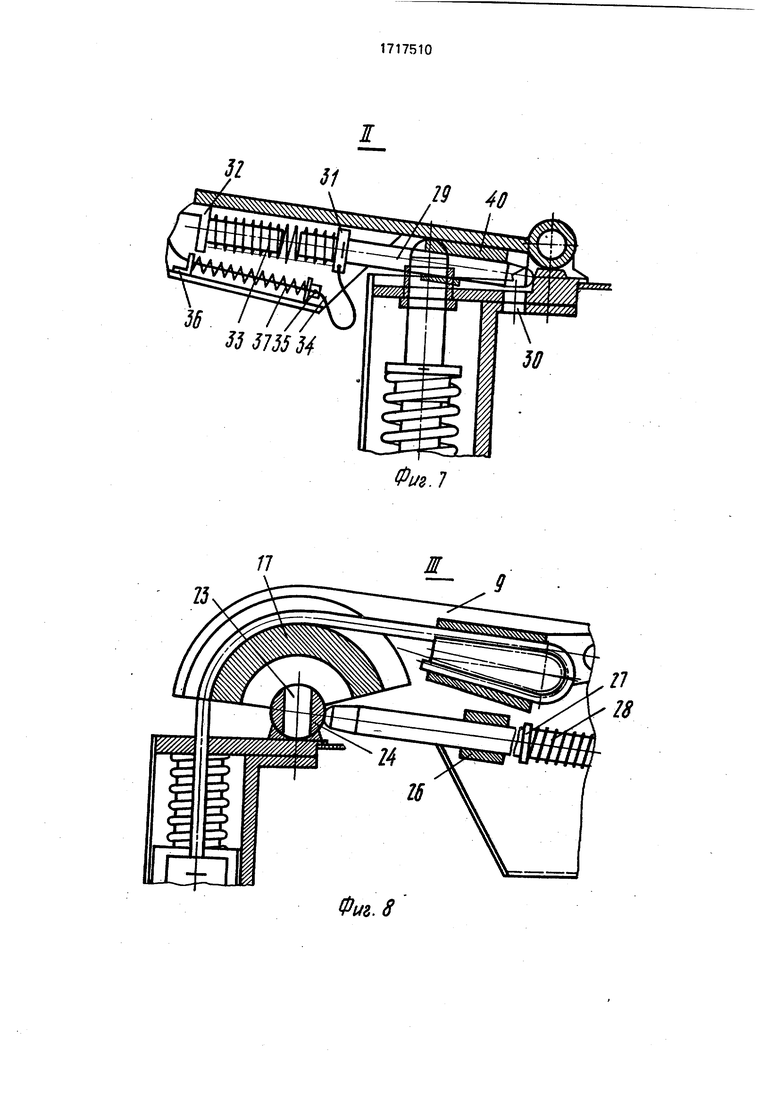
-вид I на фиг.З (платформа 10 условно не показана); на фиг.б - общий вид уравновешивающего мостика (в рабочем положении, фиксаторы показаны); на фиг.7- вид II фиг.б (платформа 9 условно не показана); на фиг.З
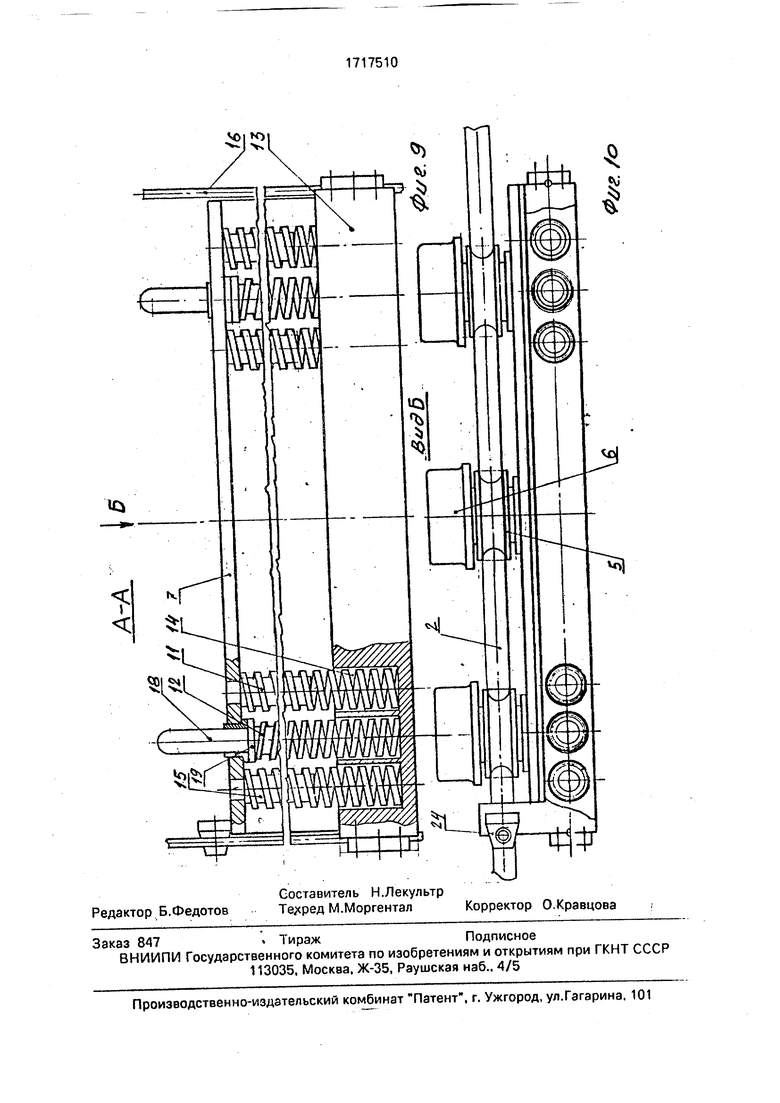
-вид II на фиг.б (платформа 10 условно не показана); на фиг.9 - сечение А-А на фиг.1; на фиг.10 - вид Б на фиг.9.
Уравнивающий мостик содержит неподвижно закрепленные вдоль рампы 1 направляющие 2-4. Направляющая 2 выполнена в виде круглого в поперечном сечении прутка, направляющие 3 и 4 выполнены как одно целое, например, могут быть полками швеллера (фиг.4). На направляющих 2-4 установлена каретка 7 с возможностью перемещения по ним на ходовых роликах 5 и 6. На каретке 7 закреплены две платформы 9 и 10 с возможностью поворота вокруг горизонтальной оси 8.
Уравнивающий мостик снабжен механизмом компенсации веса платформ 9 и 10, выполненным в виде системы винтовых цилиндрических пружин 11 и 12 сжатия (фиг.9), размещенный вертикально между кареткой 7 и траверсой 13, установленной с возможностью вертикального перемещения на каретке 7. В траверсе 13 выполнены направляющие цилиндрические углубления
14для пружин 11 и 12, и на каретке неподвижно закреплены направляющие стержни
15для пружин 11. Траверса 13 соединена с платформой 9 тросами 16 (фиг.б, 8), огибающими блоки 17. Одни концы тросов 16 неподвижно соединены с платформой 9, другие-с траверсой 13.
В отверстиях, выполненных в каретке 7, размещены стержни 18. опирающиеся выполненными на них буртиками 19 на пружины 12. Стержни 18 предназначены для взаимодействия с платформой 10 (фиг.4, 7).
Система ходовых роликов образована парами соосных роликов 5 и 6 (фиг,4). Ролик 5 каждой пары имеет выполненный на его боковой поверхности кольцевой желоб 20 для взаимодействия с профилированной направляющей 2.
Ролик 6 размещен с зазором (зазор на чертеже не показан) между двумя горизонтальными направляющими 3 и 4 (полки швеллера). Направляющие 2-4 (пруток и швеллер) неподвижно закреплены на горизонтальной поверхности рампы 1. Ролики 5
и 6 установлены с возможностью вращения на оси 21. неподвижно соединенной с кареткой 7,
Уравнивающий мостик снабжен фикса- 5 торами для фиксирования платформы 9 и 10 в нерабочем, вертикальном положении (фиг. 6-8).
Фиксатор большой платформы 9 образован стержнем 22 и отверстием 23, выпол0 ненным в опоре 24, неподвижно соединенной с кареткой 7. Стержень 22 пропущен через отверстия направляющих 25 и 26, неподвижно закрепленных на платформе 9. Между буртиком 27, выполненным на
5 стержне 22, и направляющей 25 установлена пружина 28.
Фиксатор малой платформы 10 образован стержнем 29 и отверстием 30, выполненным в каретке 7. Между буртиком 31
0 стержня 29 и упором 32. закрепленным на платформе 10, установлена пружина 33. Для . управления фиксатором платформы 10 предназначен: трос 34, одним концом неподвижно соединенный со стержнем 29. Трос
5 34 снабжен неподвижно закрепленным на нем упором 35 и пропущен через отверстие в упоре 36, неподвижно соединенном с платформой 10. Между упорами 35 и 36 установлена пружина 37. Трос 34 может быть
0 перекинут через блок 38. пропущен через отверстие в платформе 10 и соединен с кольцом 39. Стержень 29 установлен с возможностью перемещения вдоль направляющей 40, закрепленной на платформе 10.
5 Уравнивающий мостик работает следующим образом.
Перед разгрузкой железнодорожного вагона уравнивающий мостике вертикально зафиксированными платформами переме0 щают таким образом, чтобы его платформы 9 и 10 расположились напротив дверного проема вагона. При движении уравнивающего мостика ходовые ролики 5 и 6 перекатываются по направляющим 2-4. При этом
5 ролики 5 благодаря наличию на их боковой поверхности желобов воспринимают продольные усилия, направленные вдоль платформы на каретку 7, предотвращая ее сход с направляющих, а также воспринимают
0 реакцию от массы мостика. Ролики 6 воспринимают опрокидывающий момент, воздействующий на каретку при перемещении мостика.
После подведения мостика к дверному
5 проему вагона сначала расфихсируют платформу 9. Для этого поднимают стержень 22, который сжимает пружину 28 и выходит из отверстия 23. Поддерживая стержень 22 а указанном положении, расфиксированную платформу 9 поворачивают из нерабочего
(вертикального) положения в рабочее. При указанном повороте платформа 9 воздействует через тросы 16 на траверсу 13 с пружинами 11 и 12, в результате чего траверса 13 поднимается, а пружины 11 и 12 сжимаются. В результате сжатия пружин 11 и 12 возникает усилие, компенсирующее момент от массы платформы 9 и облегчающее указанный поворот.
Затем фиксируют платформу 10. Для этого, подтянув за кольцо 39, натягивают трос, в результате чего стержень 29 выходит из отверстия 30, расфиксируя платформу 10. Пружина 33 сжимается. Оставив трос 34 в натянутом состоянии (платформа 10 рас- фиксирована) поворачивают платформу 10 из нерабочего (вертикального) положения в рабочее, при котором платформа опирается на пол 41 вагона (фиг.6). При повороте плат- Формы 10 последняя входит во взаимодей- ствие со стержнями 18, в результате чего .стержни под действием массы платформы опускаются, сжимая пружины 12. При сжатии пружин 12 возникает усилие, компенсирующее массу платформы 10 и облегчающее еб поворот вручную. После установки платформы 10 в рабочее положение отпускают кольцо 39, в результате чего трос 34 возвращается пружиной 33 в первоначальное положение, при котором часть его между упором 35 и стержнем 29 провисает (фиг.7). Для выполнения погрузочно-разгрузочных работ по платформам 9 и 10 погрузчик въезжает в вагон.
После выполнения погрузочно-разгру- зочных работ платформы 9 и 10 поворачивают в вертикальное, нерабочее положение. Во время указанного поворота пружины 11 и 12 разжимаются и облегчают поворот
0 5 0 5 0
5
0
платформ 9 и 10, стержни 22 и 29 под действием пружин 28 и 33 входят в отверстия 23 и 30, автоматически фиксируя платформы в вертикальном положении.
Использование предлагаемого технического решения позволит повысить технику безопасности за счет уменьшения расстояния, на которое выступают за пределы рампы конструктивные элементы уравнивающих мостиков.
Формула изобретения Уравнивающий мостик, содержащий установленную на рампе с возможностью перемещения вдоль нее каретку, на горизонтальной оси которой шарнирно закреплены две платформы, механизм компенсации массы одной платформы, образованный соединенными кинематической связью с последней винтовыми цилиндрическими пружинами, одними концами связанными с кареткой, отличающийся тем. что, с целью повышения надежности и удобства обслуживания, он снабжен установленной на каретке с возможностью вертикального перемещения траверсой, с которой связаны другие концы пружин, которые размещены вертикально, причем траверса соединена с другой из указанных платформ гибкими тягами, запасованными в блоки, которые установлены соосно на указанной оси - для компенсации массы другой платформы, а указанная кинематическая связь образована установленным на указанном одном конце по меньшей мере одной из пружин с возможностью ограниченного вертикального перемещения в отверстии, которое выполнено в каретке, по меньшей мере одним стержнем для взаимодействия с указанной одной платформой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравнивающий мостик | 1989 |
|
SU1675174A1 |
| Уравнивающий мостик | 1985 |
|
SU1261873A1 |
| Уравнивающий мостик | 1989 |
|
SU1661122A1 |
| Уравнивающий мостик | 1990 |
|
SU1752701A1 |
| Уравнивающий мостик | 1982 |
|
SU1133205A1 |
| Уравнивающий мостик | 1990 |
|
SU1720971A1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПОД ЗАДАННЫМ НАТЯЖЕНИЕМ И СПОСОБЫ МОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПРИ ПОМОЩИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2097218C1 |
| Уравнивающий мостик | 1988 |
|
SU1599295A1 |
| Уравнивающий мостик | 1982 |
|
SU1118595A1 |
| Устройство для погрузки штучных грузов в вагон | 1989 |
|
SU1735170A1 |


Изобретение относится к вспомогательным складским грузоподьемным устройствам, в частности к уравнивающим мостикам, соединяющим погрузочно-разгрузочную рампу склада с полом транспортного средства, например железнодорожного вагона, и позволяющим компенсировать большую разницу высот рампы и пола железнодорожного вагона (автомобиля) и обеспечить въезд погрузчика с рампы в транспортное средство. Цель изобретения - повышение надежности и удобства обслуживания. Уравнивающий мостик содержит установленную на рампе каретку, на которой шар- нирно закреплены поворотные платформы, снабженные механизмом компенсации их массы образованным установленной на каретке траверсой с вертикальными пружинами, размещенными между траверсой и кареткой, и с тросами, связанными с одной из платформ, а на пружинах установлены стержни для взаимодействия с другой платформы для компенсации массы платформ при их опускании и поднимании. 10 ил. Ё
Фиг.1
17 27 28 25 . / / / / jL
Фиг.2
t vty.
OLSUU
«л
36
25
Фиг. 8
40
Фиг. 7
| Проспект фирмы ФРГ ANCRA JUNGFALK GMBH, Rons Loudlng Bridges, 1985. |
