относительно рядом расположенных ПГ 3 этих штанг 2 на половину шага, поворачиваются в противоположных направлениях на 90°С и перемещают изделие 12 на половину шага. При обратном движении шарнира 10
ВЭ 5 рычаги поворачивают ПШ 2 в обратном направлении на 90°, и соседние ПГ 3 перемещают изделие 12 еще на половину шага. 1 з.п. ф-лы, 3 ил.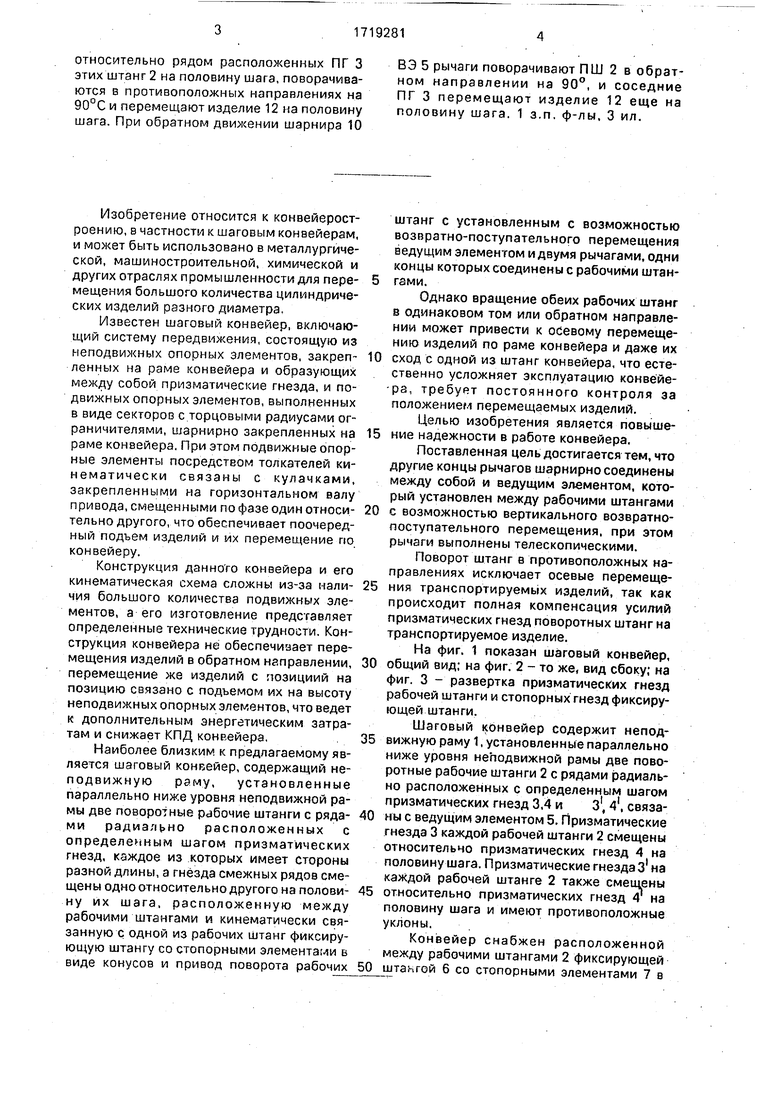
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер для транспортирования тел вращения | 1980 |
|
SU905164A1 |
| Шаговый конвейер | 1976 |
|
SU624835A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Шаговый конвейер автоматической линии | 1984 |
|
SU1234311A1 |
| Шаговый конвейер | 1979 |
|
SU804550A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Устройство для перегрузки цилиндрических грузов | 1988 |
|
SU1511195A2 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Шаговый конвейер | 1978 |
|
SU724402A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU781135A1 |
Изобретение относится к конвейеростро- ению и может быть использовано в машиностроительной, химической, металлургической и других отраслях промышленности для перемещения большого количества цилиндрических изделий разного диаметра. Цель - повышение надежности работы конвейера. Шаговый конвейер содержит неподвижную раму 1, установленные параллельно ниже уровня фигЛ неподвижной рамы две поворотные рабочие штанги (РШ) 2 с рядами радиально рас- положенных с определенным шагом призматических гнезд (ПО 3.4 и ЗЧ 1 связанные с ведущим элементом (ВЭ) 5. На каждой РШ 2 относительно ПГ 4 на половину шага смещены ПГ 3, а ПГ З1 на каждой РШ 2 также смещены относительно ПГ 4 на половину шага и имеют противоположные уклоны. Между РШ 2 расположена фиксирующая штанга 6 со стопорными элементами 7 в виде конусов, кинематически связанная с одной из РШ 2 цепной передачей 8 звездочками 11. Ведущий элемент 5 связан с РШ 2 телескопическими рычагами 9 посредством шарнира 10. Двигая шарнир 10, связанный с телескопическими рычагами 9, вверх, ВЭ 5 поворачивает ПШ 2 в противоположном направлении. В это время ПГ 4, смещенные 10 .V W ё О ю 00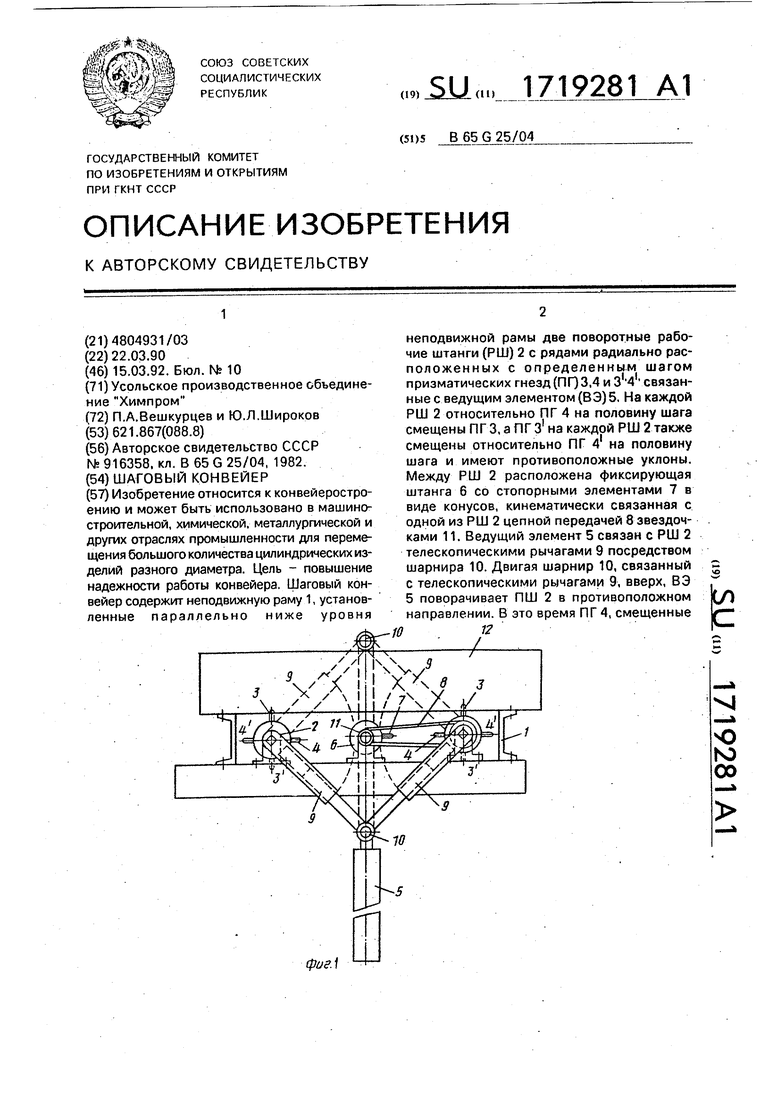
Изобретение относится к конвейерост- роению, в частности к шаговым конвейерам, и может быть использовано в металлургической, машиностроительной, химической и других отраслях промышленности для перемещения большого количества цилиндрических изделий разного диаметра,
Известен шаговый конвейер, включающий систему передвижения, состоящую из неподвижных опорных элементов, закрепленных на раме конвейера и образующих между собой призматические гнезда, и подвижных опорных элементов, выполненных в виде секторов с торцовыми радиусами ограничителями, шарнирно закрепленных на раме конвейера. При этом подвижные опорные элементы посредством толкателей кинематически связаны с кулачками, закрепленными на горизонтальном валу привода, смещенными по фазе один относительно другого, что обеспечивает поочередный подъем изделий и их перемещение по конвейеру.
Конструкция данного конвейера и его кинематическая схема сложны из-за наличия большого количества подвижных эле ментов, а его изготовление представляет определенные технические трудности. Конструкция конвейера не обеспечизает перемещения изделий в обратном направлении, перемещение же изделий с позициий на позицию связано с подъемом их на высоту неподвижных опорных элементов, что ведет к дополнительным энергетическим затратам и снижает КПД конвейера.
Наиболее близким к предлагаемому является шаговый конвейер, содержащий неподвижную раму, установленные параллельно ниже уровня неподвижной рамы две поворотные рабочие штанги с рядами радиально расположенных с определенным шагом призматических гнезд, каждое из которых имеет стороны разной длины, а гнёзда смежных рядов смещены одно относительно другого на половину их шага, расположенную между рабочими штангами и кинематически связанную с одной из рабочих штанг фиксирующую штангу со стопорными элементами в виде конусов и привод поворота рабочих
штанг с установленным с возможностью возвратно-поступательного перемещения ведущим элементом и двумя рычагами, одни концы которых соединены с рабочими штангами.
Однако вращение обеих рабочих штанг в одинаковом том или обратном направлении может привести к осевому перемещению изделий по раме конвейера и даже их
сход с одной из штанг конвейера, что естественно усложняет эксплуатацию конвёйе- -ра, требует постоянного контроля за положением перемещаемых изделий.
Целью изобретения является повышение надежности в работе конвейера.
Поставленная цель достигается тем, что другие концы рычагов шарнирно соединены между собой и ведущим элементом, который установлен между рабочими штангами
с возможностью вертикального возвратно- поступательного перемещения, при этом рычаги выполнены телескопическими.
Поворот штанг в противоположных направлениях исключает осевые перемещения транспортируемых изделий, так как происходит полная компенсация усилий призматических гнезд поворотных штанг на транспортируемое изделие.
На фиг. 1 показан шаговый конвейер,
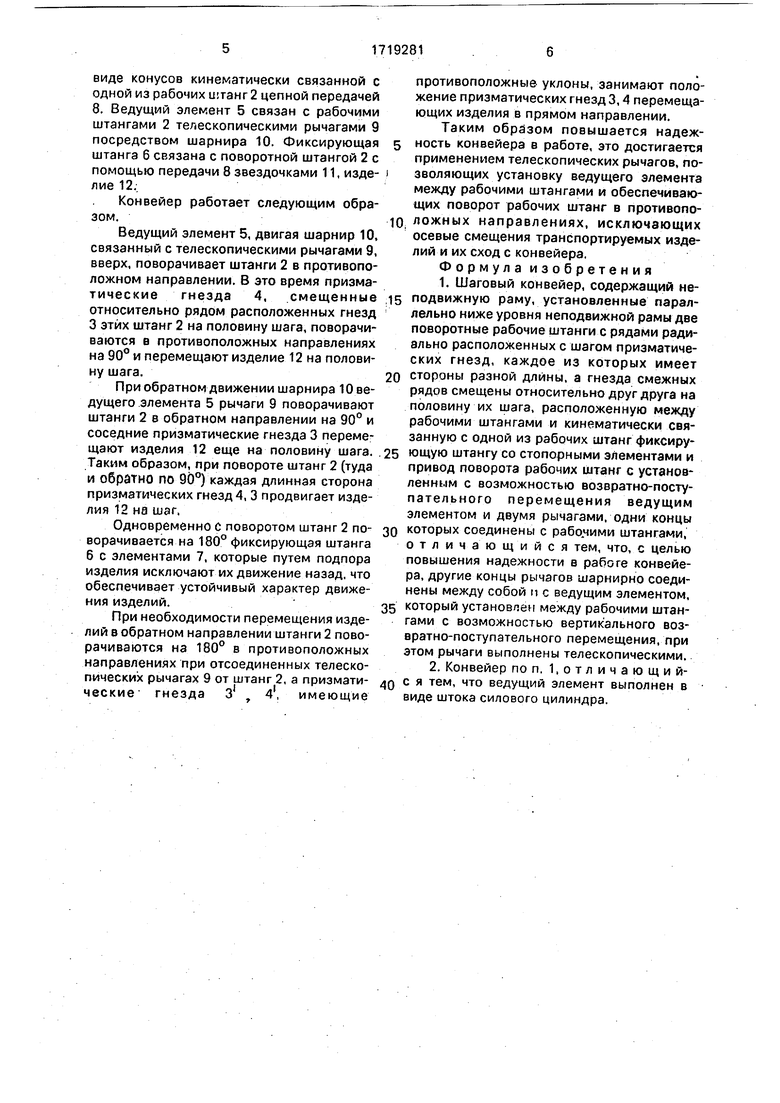
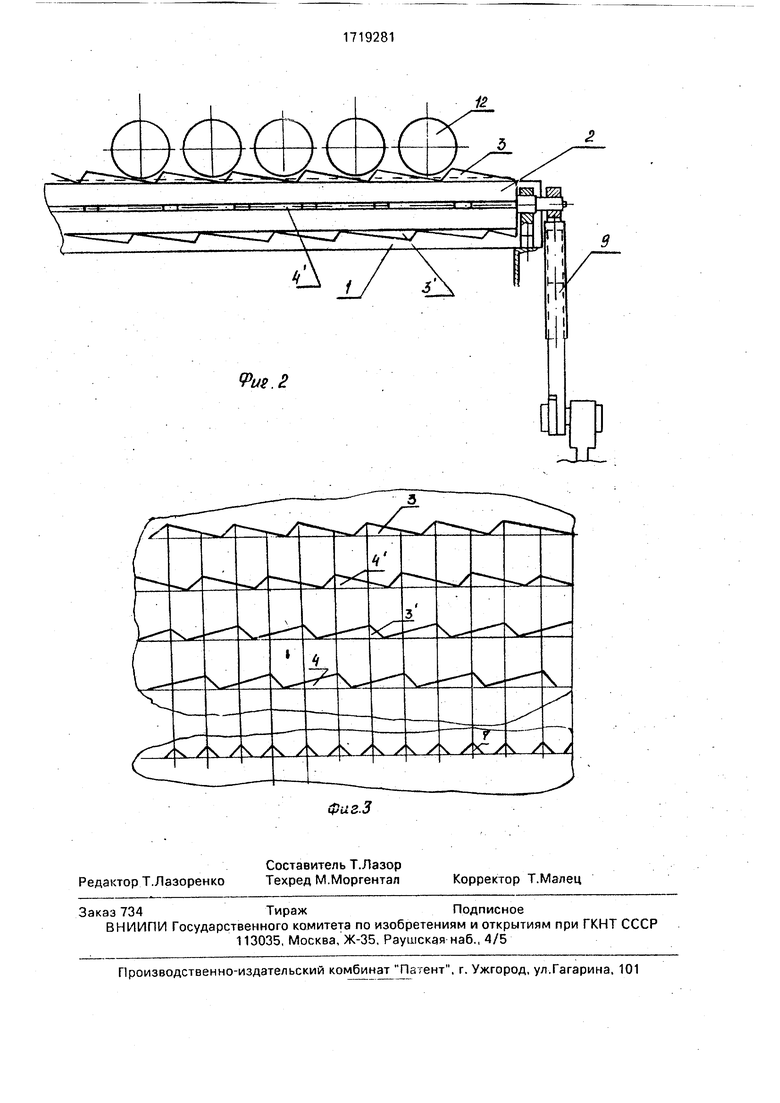
общий вид; на фиг. 2 - то же вид сбоку; на фиг. 3 - развертка призматических гнезд рабочей штанги и стопорных гнезд фиксирующей штанги.
Шаговый конвейер содержит неподвижную раму 1, установленные параллельно ниже уровня неподвижной рамы две поворотные рабочие штанги 2 с рядами радиально расположенных с определенным шагом призматических гнезд 3,4 и З1, А1, связаны с ведущим элементом 5. Призматические гнезда 3 каждой рабочей штанги 2 смещены относительно призматических гнезд 4 на половину шага. Призматические гнезда З1 на каждой рабочей штанге 2 также смещены
относительно призматических гнезд 4 на половину шага и имеют противоположные уклоны.
Конвейер снабжен расположенной между рабочими штангами 2 фиксирующей
штангой 6 со стопорными элементами 7 в
виде конусов кинематически связанной с одной из рабочих штанг 2 цепной передачей 8. Ведущий элемент 5 связан с рабочими штангами 2 телескопическими рычагами 9 посредством шарнира 10. Фиксирующая штанга 6 связана с поворотной штангой 2 с помощью передачи 8 звездочками 11, изделие 12;
Конвейер работает следующим образом.
Ведущий элемент 5, двигая шарнир 10, связанный с телескопическими рычагами 9, вверх, поворачивает штанги 2 в противоположном направлении. В это время призматические гнезда 4, смещенные относительно рядом расположенных гнезд 3 этих штанг 2 на половину шага, поворачиваются в противоположных направлениях на 90° и перемещают изделие 12 на половину шага.
При обратном движении шарнира 10 ведущего элемента 5 рычаги 9 поворачивают штанги 2 в обратном направлении на 90° и соседние призматические гнезда 3 переме щают изделия 12 еще на половину шага. Таким образом, при повороте штанг 2 (туда и обратно по 90°) каждая длинная сторона призматических гнезд 4, 3 продвигает изделия 12 на шаг,
Одновременно С поворотом штанг 2 поворачивается на 180° фиксирующая штанга 6 с элементами 7, которые путем подпора изделия исключают их движение назад, что обеспечивает устойчивый характер движения изделий.
При необходимости перемещения изделий в обратном направлении штанги 2 поворачиваются на 180° в противоположных направлениях при отсоединенных телескопических рычагах 9 от штанг 2, а призматические гнезда З1 41, имеющие
противоположные уклоны, занимают положение призматических гнезд 3,4 перемещающих изделия в прямом направлении.
Таким образом повышается надеж5 ность конвейера в работе, это достигается
применением телескопических рычагов, позволяющих установку ведущего элемента между рабочими штангами и обеспечивающих поворот рабочих штанг в противопощ ложных направлениях, исключающих осевые смещения транспортируемых изделий и их сход с конвейера.
Формула изобретения
0 стороны разной длины, а гнезда смежных рядов смещены относительно друг друга на половину их шага, расположенную между рабочими штангами и кинематически связанную с одной из рабочих штанг фиксиру5 ющую штангу со стопорными элементами и привод поворота рабочих штанг с установленным с возможностью возвратно-поступательного перемещения ведущим элементом и двумя рычагами, одни концы
0 которых соединены с рабочими штангами, отличающийся тем, что, с целью повышения надежности в работе конвейера, другие концы рычагов шарнирно соединены между собой II с ведущим элементом,
5 который установлен между рабочими штангами с возможностью вертикального возвратно-поступательного перемещения, при этом рычаги выполнены телескопическими. 2. Конвейер поп, 1,отличающийQ с я тем, что ведущий элемент выполнен в виде штока силового цилиндра.
Pw.2
12
| Авторское свидетельство СССР № 916358.кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
