Изобретение относится к манипулятор- ной технике и может быть использовано для автоматических линий.
Цель изобретения - расширение технологических возможностей за счет увеличения зоны обслуживания.
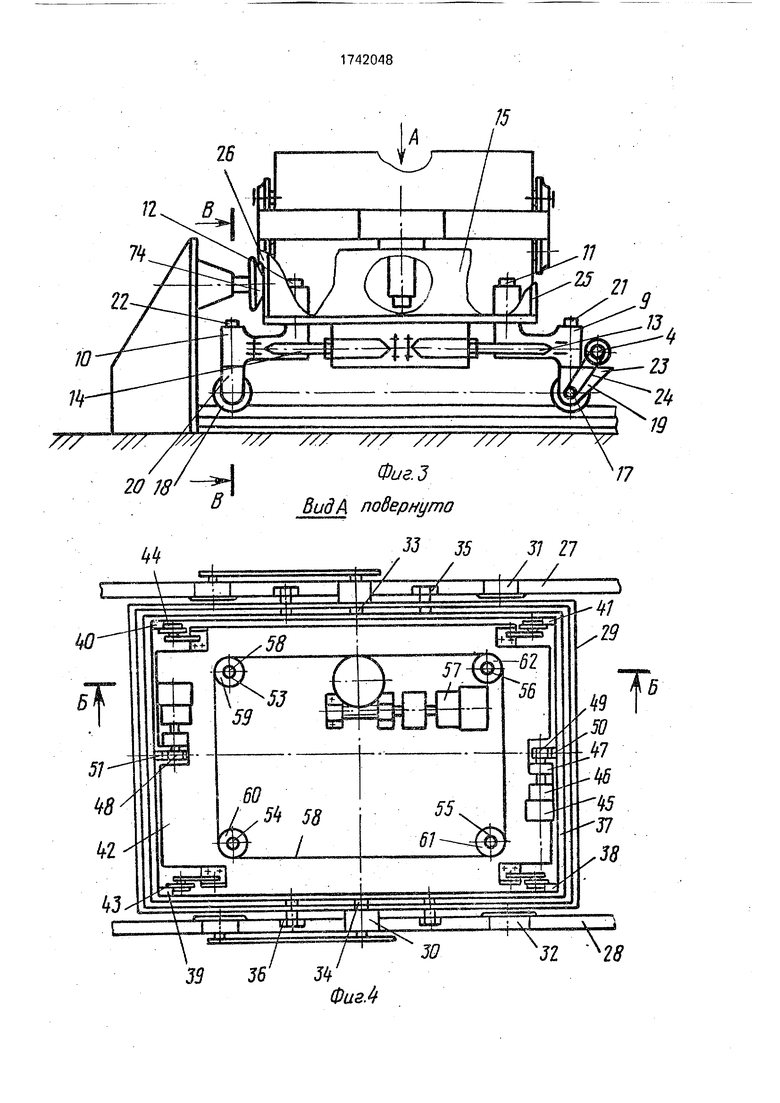
На фиг. 1 представлено манипулятор- ное устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - основная тележка с кареткой; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - сечение Б-Б на фиг. 4; на фиг. 6 - узел I на фиг. 2; на фиг. 7 - сечение В-В на фиг. 3.
Манипуляторное устройство состоит из основания 1 с прямолинейными направляющими 2, на которых установлена основная тележка 3 с приводом 4 перемещения основной тележки и несущая исполнительный орган. Основная тележка 3 своими краями опирается на мосты 5 и 6 с помощью осей 7 и 8, которые содержат кронштейны 9 и 10, соединенные осями 11 и 12 и подпружиненными талрепами 13 и 14 двуплечими рычагами 15 и 16. Катки 17 и 18 с ребордами основной тележки 3 закреплены на вилках 19 и 20, оси 21 и 22 которых связаны с кронштейнами 9 и 10. Привод 4 перемещения основной тележки закреплен на платформе 23 кронштейна 9 и кинематически связан с катком 17 гибкой передачей 24. Ыа рычагах 15 и 16 выполнены упоры 25 и 26. На основной тележке-смонтированы основные направляющие 27 и 28. Исполнительный орган выполнен в поперечной тележке 29 с приводом 30 ее перемещения, установленной на направляющих 27 и 28 посредством катков 31 и 32. На поперечной тележке 29 на осях 33 и 34 с фиксаторами 35 и 36 закреплена рама 37, на которой смонтированы дополнительные направляющие 38-41. На последних установлена подъемная каретка 42 с подпружиненными роликами 43 и 44 с приводом ее подъема. Привод подъема каретки 42 выполнен в виде электродвигателя 45, безлюфтового волнового редуктора 46, связанного с помощью электромагнитной тормозной муфты 47 с зубчатыми колесами 48 и 49 зубчато-реечной передачи, рейки 50 и 51 которой смонтированы на поперечной тележке 29 параллельно дополнительным направляющим 38-41. На платформе 52 подъемной каретки 42 установлены зажимные элементы захватов, выполненные в виде штырей 53-56, и привод 57 их перемещения. Привод 57 перемещения штырей выполнен в виде двигателя, кинематически связанного с замкнутой цепью Галля 58, взаимодействующей с зубчатыми колесами 59-62 штырей 63-56. Штыри 53-56 выполнены с лысками 63 и кольцевыми проточками 64. На съемном
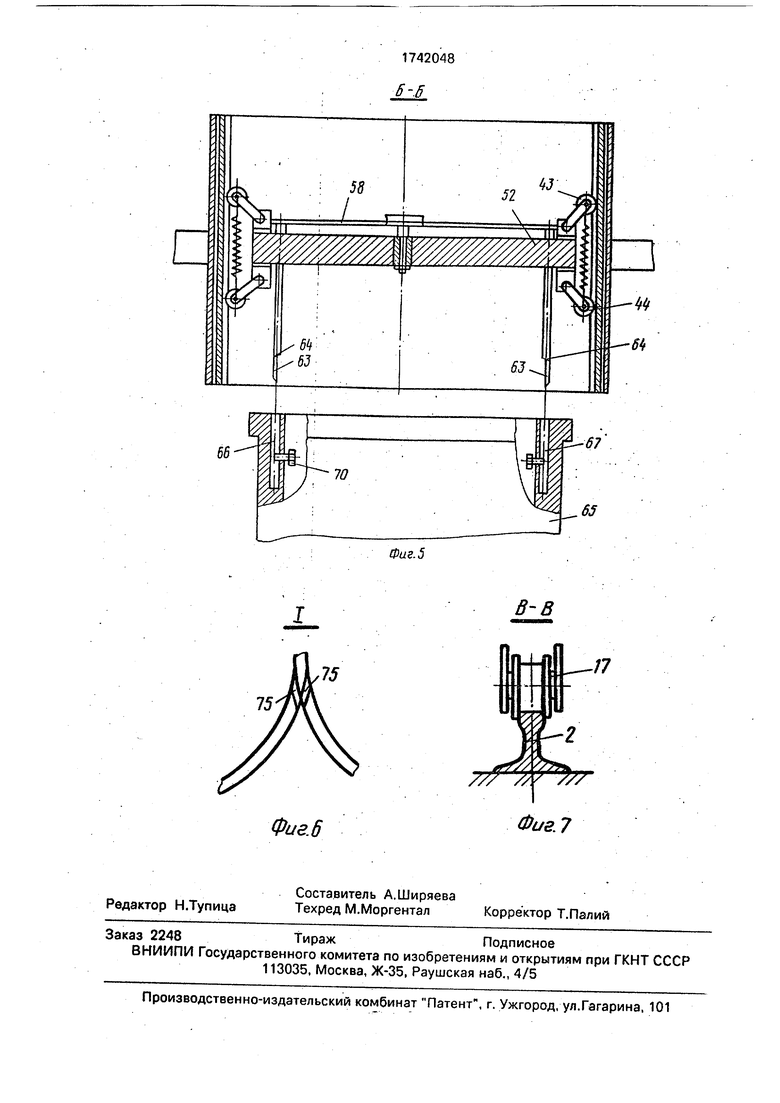
элементе 65 выполнены отверстия 66-69 с выступом 70, взаимодействующим с кольцевой проточкой 64 штырей 53-56.
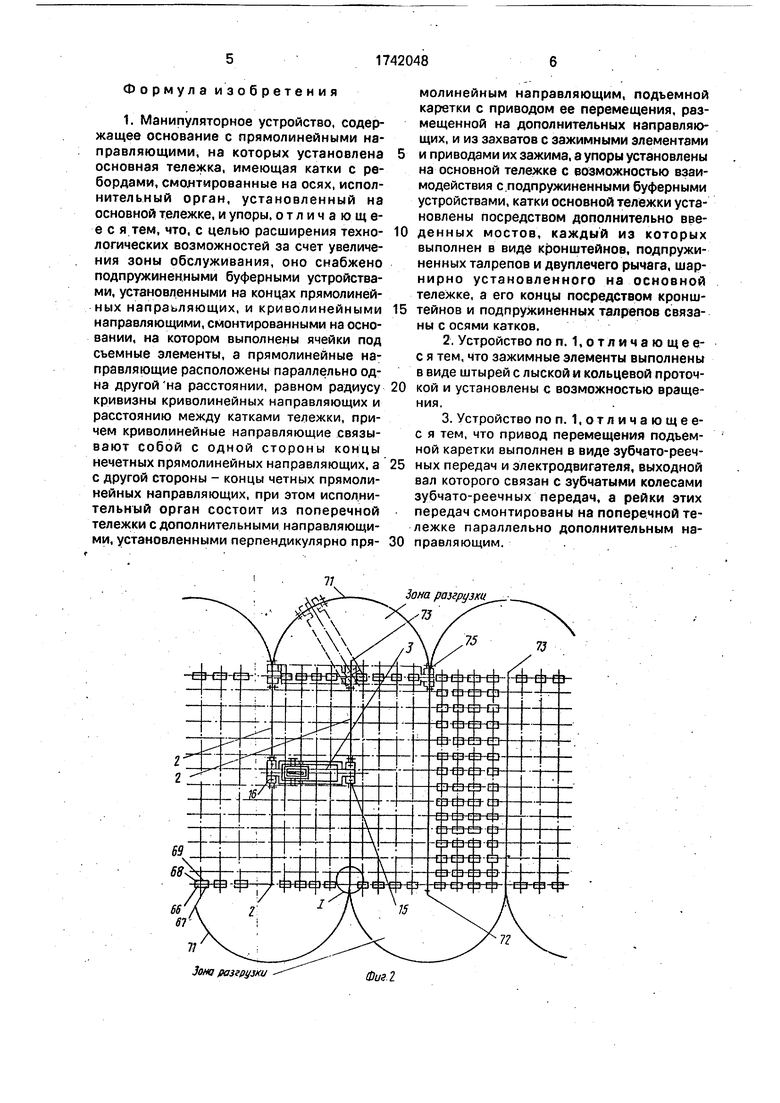
Прямолинейные направляющие 2 смонтированы на основании 1 параллельно одна другой на расстоянии, равном радиусу кривизны криволинейных направляющих 71 и расстоянию между катками 17 и 18 основной тележки 3, причем криволинейные на0 правляющие 71 связывают собой с одной стороны четные прямолинейные направляющие, а с другой стороны - нечетные прямолинейные направляющие.
Ня основании 1 между прямолинейны5 ми направляющими 2 выполнены ячейки под съемные элементы 65, а на концах 72 и 73 прямолинейных направляющих 2 установлены подпружиненные буферные устройства 74, взаимодействующие с упорами
0 25 и 26, установленными на основной тележке 3. В местах стыков криволинейных 71 и прямолинейных 2 направляющих выполнены разъезды с пазами 75 для реборд катков 17 и 18.
5
Манипуляторное устройство работает следующим образом.
Для осуществления съема элемента 65 основная тележка 3 устанавливается соосно
0 с рядом, в котором располагается съемный элемент 65. После этого поперечная тележка 29 перемещается по направляющим 27 и 28 до совпадения ее поперечной оси с осью съемного элемента 65, после чего платфор5 ма 52 по направляющим 38-41 опускается вниз, а ее штыри 53-56 заходят в отверстия 66-69 съемного элемента 65. Вращая зубчатые колеса 59-62, штыри 53-56 поворачиваются вокруг продольной оси. При этом выступы
0 70 попадают в кольцевые проточки 64,
Затем платформа 52 поднимается вверх, поджимая съемный элемент 65 над плоскостью, образованной закрепленными съемными элементами в исходном положе5 нии. Тележка 3 перемещается по прямолинейным участкам направляющих 2. Упор 26, дойдя до буферного устройства 74, прекращает движение основной тележки 3 по прямолинейным участкам, в то время как мост
0 6 продолжает свое движение по криволинейному участку 71, вынося снятый элемент 65 в зону разгрузки, Опустив съемный элемент на транспортное средство (не показано) и освободив штыри 53-56 действиями,
5 обратными указанным выше, тележка 3 переходит в положение для загрузки на поперечную тележку 29 нового съемного элемента 65 с транспортного средства, транспортирует его и устанавливает на свободное место.
Формула изобретения
1. Манипуляторное устройство, содержащее основание с прямолинейными направляющими, на которых установлена основная тележка, имеющая катки с ребордами, смонтированные на осях, исполнительный орган, установленный на основной тележке, и упоры, отличающееся тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, оно снабжено подпружиненными буферными устройствами, установленными на концах прямолинейных напрзьляющих, и криволинейными направляющими, смонтированными на основании, на котором выполнены ячейки под съемные элементы, а прямолинейные направляющие расположены параллельно одна другой на расстоянии, равном радиусу кривизны криволинейных направляющих и расстоянию между катками тележки, причем криволинейные направляющие связывают собой с одной стороны концы нечетных прямолинейных направляющих, а с другой стороны - концы четных прямолинейных направляющих, при этом исполнительный орган состоит из поперечной тележки с дополнительными направляющими, установленными перпендикулярно прямолинейным направляющим, подъемной каретки с приводом ее перемещения, размещенной на дополнительных направляющих, и из захватов с зажимными элементами
и приводами их зажима, а упоры установлены на основной тележке с возможностью взаимодействия с.подпружиненными буферными устройствами, катки основной тележки установлены посредством дополнительно введенных мостов, каждый из которых выполнен в виде кронштейнов, подпружиненных талрепов и двуплечего рычага, шар- нирно установленного на основной тележке, а его концы посредством кронштеинов и подпружиненных талрепов связаны с осями катков.
2.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что зажимные элементы выполнены в виде штырей с лыской и кольцевой проточкой и установлены с возможностью вращения,
3.Устройство поп. 1,отличающее- с я тем, что привод перемещения подъемной каретки выполнен в виде зубчато-реечных передач и электродвигателя, выходной вал которого связан с зубчатыми колесами зубчато-реечных передач, а рейки этих передач смонтированы на поперечной тележке параллельно дополнительным направляющим.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Конвейерная линия для изготовления комбинированных изделий | 1976 |
|
SU654433A1 |
| СПОСОБ СОРТИРОВКИ КУСКОВОГО МИНЕРАЛЬНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2103075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Устройство для намотки полосового материала | 1980 |
|
SU990366A1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1996 |
|
RU2104630C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство для сооружения тоннелей круглого сечения со сборной обделкой | 1985 |
|
SU1283399A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
Использование: автоматизация процесса замены съемных элементов в автоматичегских линиях. Сущность изобретения: манипуляторное устройство содержит основную тележку 3, установленную на прямо- линейных направляющих основания 1 и несущую исполнительный орган. Прямолинейные направляющие расположены параллельно одна другой на расстоянии, равном радиусу кривизны криволинейных направ- ляющих, соединяющих между собой с одной стороны нечетные прямолинейные направляющие, а с другой стороны - четные направляющие. При этом расстояние между прямолинейными направляющими равно расстоянию между катками основной тележки, которые установлены на основной тележке посредством мостов, выполненных в виде двуплечих рычагов, шарнирно установленных на тележке 3, концы которых посредством кронштейнов и подпружиненных талрепов связаны с осями катков. На концах этих направляющих установлены подпружиненные буферные устройства, взаимодействующие с упорами основной тележки. Исполнительный орган включает поперечную тележку с дополнительными направляющими, расположенными перпендикулярно прямолинейным направляющим, и на которых установлена подъемная каретка с приводом ее перемещения, несущая захваты с зажимными элементами в виде штырей с лыской и кольцевой проточкой, установленных с возможностью вращения. Кроме этого, привод перемещения подъемной каретки выполнен в виде электродвигателя с волновым редуктором и зубчато-реечной передачей, рейки которой смонтированы на поперечной тележке параллельно дополнительным направляющим 2 з.п. ф-лы, 7 ил. С/) С 2 Ю О ь. 00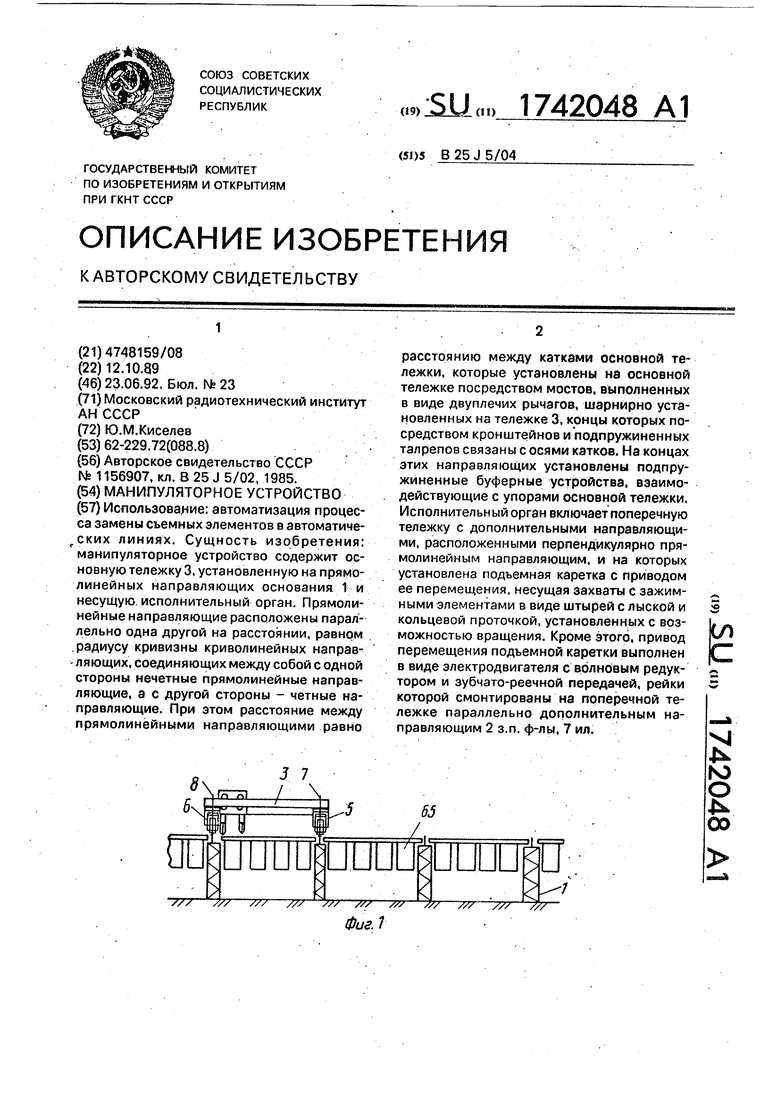
77
Зона разгрузки
Фиг
LL
ouufiHdagQu VPn9 Ј-гпф
/// /// /// /// /// ///
9 М
//У /SS
9 Z/
91
QbOgt Z.l
75
75
6Ь
65
| Устройство для точной остановки ходовой тележки манипулятора | 1983 |
|
SU1156907A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
