vi
ю о
Ю
GJ
Изобретение относится к области управления летательными аппаратами.
Известна система управления самолета, содержащая ручку управления, автомат регулирования управления и сервопривод стабилизатора. В этой системе автоматически по сигналу скоростного напора изменяется передаточное число от ручки управления к сервоприводу стабилизатора, что позволяет получить желаемые значения градиента перемещения ручки управления самолета по перегрузке.
Недостатком системы является то, что изменение подъемной силы создается только угловым отклонением летательного аппа- рата относительно центра масс, что ограничивает разнообразие маневров в вертикальной плоскости.
Наиболее близкой по технической сущности к предлагаемой является система уп- равления самолета, снабженного канардами, содержащая ручку управления, автомат регулировки управления, включающий вычислитель и сервопривод, сервопривод стабилизатора, датчики статического и динамического давления, подключенные соответственно к первому и второму входам вычислителя автомата регулировки управления, ручка управления, сервопривод автомата регулировки управления, второй вход которого подключен к выходу вычислителя автомата регулировки управления, и сервопривод стабилизатора соединены последовательно, а также сервопривод канард и последовательно соединены датчик поло- жения стабилизатора, сумматор, кнопку включения режима вертикального смещения с размыкающим контактом, электродви- гатель и датчик положения штока электродвигателя, выход которого соеди- нен с вторым входом сумматора.
Недостатком этой системы является непропорциональное изменение вертикальных составляющих аэродинамических сил на стабилизаторе и канардах при измене- нии числа М полета, что приводит к появлению неуравновешенного момента относительно боковой оси, изменению угла тангажа и нарушению условий вертикального положения.
Цель изобретения - снижение величины несбалансированного момента самолета в режиме продольного плоскопараллельного смещения.
Поставленная цель достигается тем, что система управления самолета, снабженного канардами, дополнительно снабжена соединенными последовательно датчиком числа М, функциональным преобразователем формирования коэффициента передачи по
углу поворота канард от угла отклонения стабилизатора и блоком умножения, второй вход которого подключен к выходу сумматора, а выход связан с сервоприводом канард.
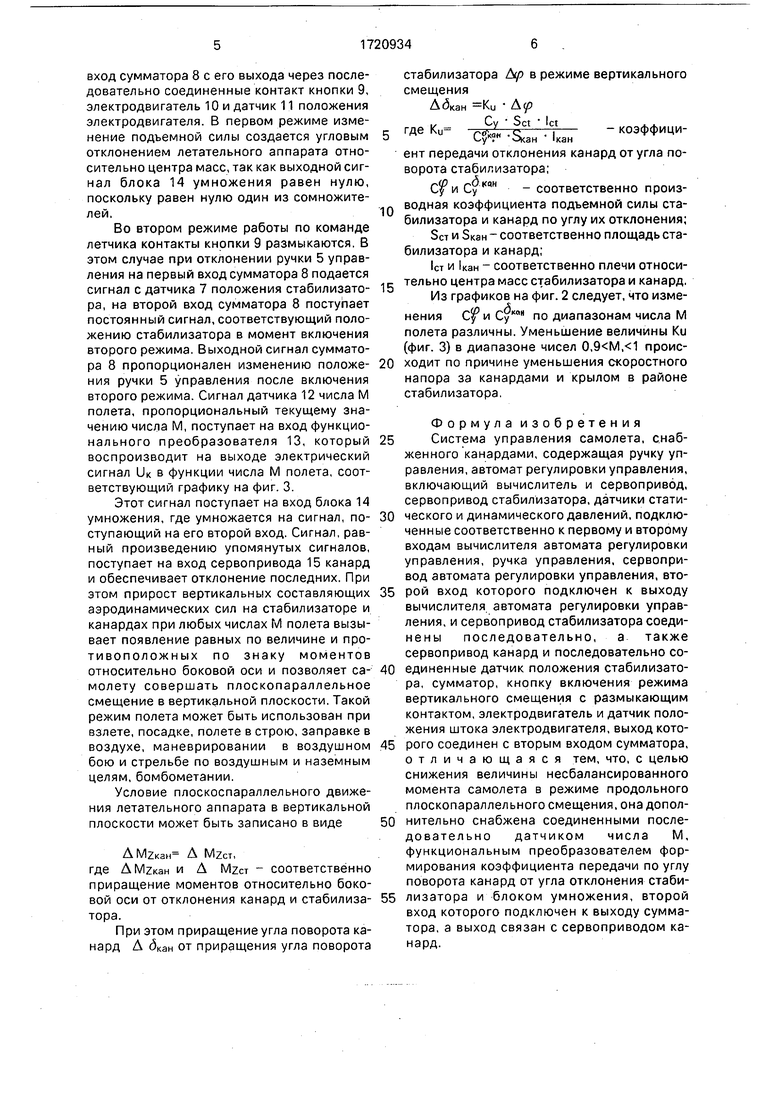
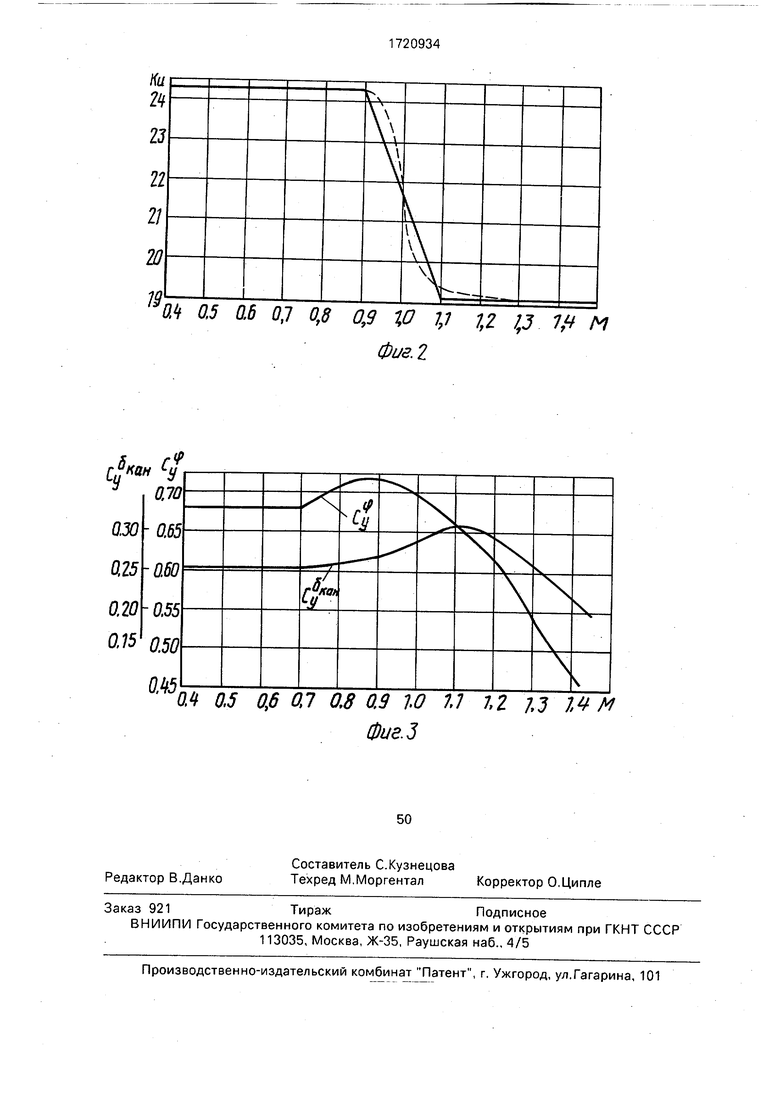
На фиг. 1 представлена функциональная схема системы управления самолета; на фиг. 2 - графики изменения производной коэффициента подъемной силы стабилизатора и канард по углу их отклонения в зависимости от числа М полета; на фиг. 3 - график требуемой зависимости коэффициента передачи по углу поворота канард от угла отклонения стабилизатора в функции числа М.
Система управления самолета содержит последовательно соединенные вычислитель 1 автомата регулирования управления и сервопривода 2 автомата регулировки управления, датчик 3 статического давления и датчик 4 динамического давления, ручку 5 управления, связанную с сервоприводом 3 автомата регулировки управления, сервопривод 6 стабилизатора, вход которого подключен к выходу сервопривода 2 автомата регулировки управления, последовательно соединенные датчик 7 положения стабилизатора, сумматор 8, кнопку 9 включения режима вертикального смещения с размыкающим контактом, электродвигатель 10 и датчик 11 положения штока электродвигателя, выход которого соединен с вторым входом сумматора 8, последовательно соединенные датчик 12 числа М полета, функциональный преобразователь 13 формирования коэффициента передачи по углу поворота канард от угла отклонения стабилизатора, блок 14 умножения, второй вход которого соединен с выходом сумматора 8 и сервопривод 15 канард.
Система управления самолета работает в двух режимах.
В первом режиме контакты кнопки 9 остаются в исходном (замкнутом) положении. Вычислитель 1 автомата регулировки управления в соответствии с сигналами датчиков статического 3 и динамического 4 давлений формирует управляющий сигнал изменения положения выходного штока сервопривода 2 автомата регулировки управления, который изменяет передаточное число от ручки 5 управления к сервоприводу 6 стабилизатора, обеспечивая требуемые значения градиента перемещения ручки управления самолета по перегрузке. Управляющий сигнал в этом режиме поступает только на сервопривод стабилизатора, поскольку сигнал с датчика 7 положения стабилизатора, поступающий на первый вход сумматора 8, обнуляется путем вычитания из него сигнала, поступающего на второй
вход сумматора 8 с его выхода через последовательно соединенные контакт кнопки 9, электродвигатель 10 и датчик 11 положения электродвигателя. В первом режиме изменение подъемной силы создается угловым отклонением летательного аппарата относительно центра масс, так как выходной сигнал блока 14 умножения равен нулю, поскольку равен нулю один из сомножителей.
Во втором режиме работы по команде летчика контакты кнопки 9 размыкаются. В этом случае при отклонении ручки 5 управления на первый вход сумматора 8 подается сигнал с датчика 7 положения стабилизатора, на второй вход сумматора 8 поступает постоянный сигнал, соответствующий положению стабилизатора в момент включения второго режима. Выходной сигнал сумматора 8 пропорционален изменению положения ручки 5 управления после включения второго режима. Сигнал датчика 12 числа М полета, пропорциональный текущему значению числа М, поступает на вход функционального преобразователя 13, который воспроизводит на выходе электрический сигнал UK в функции числа М полета, соответствующий графику на фиг. 3.
Этот сигнал поступает на вход блока 14 умножения, где умножается на сигнал, поступающий на его второй вход. Сигнал, равный произведению упомянутых сигналов, поступает на вход сервопривода 15 канард и обеспечивает отклонение последних. При этом прирост вертикальных составляющих аэродинамических сил на стабилизаторе и канардах при любых числах М полета вызывает появление равных по величине и противоположных по знаку моментов относительно боковой оси и позволяет самолету совершать плоскопараллельное смещение в вертикальной плоскости. Такой режим полета может быть использован при взлете, посадке, полете в строю, заправке в воздухе, маневрировании в воздушном бою и стрельбе по воздушным и наземным целям, бомбометании.
Условие плоскоспараллельного движения летательного аппарата в вертикальной плоскости может быть записано в виде
АМ2кан A MZCT,
где AMzKaH и A MZCT - соответственно приращение моментов относительно боковой оси от отклонения канард и стабилизатора.
При этом приращение угла поворота канард А (5Кан от приращения угла поворота
стабилизатора Дуэ в режиме вертикального смещения
Ки A (f)
ГПР К -рУ §ct lct
С где 1Чи- . Q . I эUyK Окан кан
- коэффициент передачи отклонения канард от угла поворота стабилизатора;
Cf и Су чн - соответственно произ- водная коэффициента подъемной силы стабилизатора и канард по углу их отклонения; Зет и Зкан - соответственно площадь стабилизатора и канард;
ICT и кан - соответственно плечи относи- тельно центра масс стабилизатора и канард. Из графиков на фиг. 2 следует, что изменения Су° и по диапазонам числа М полета различны. Уменьшение величины Ки (фиг. 3) в диапазоне чисел 0,,1 проис- ходит по причине уменьшения скоростного напора за канардами и крылом в районе стабилизатора.
Формула изобретения
Система управления самолета, снабженного канардами, содержащая ручку управления, автомат регулировки управления, включающий вычислитель и сервопривод, сервопривод стабилизатора, датчики статического и динамического давлений, подключенные соответственно к первому и второму входам вычислителя автомата регулировки управления, ручка управления, сервопривод автомата регулировки управления, второй вход которого подключен к выходу вычислителя автомата регулировки управления, и сервопривод стабилизатора соеди- нены последовательно, а также сервопривод канард и последовательно соединенные датчик положения стабилизатора, сумматор, кнопку включения режима вертикального смещения с размыкающим контактом, электродвигатель и датчик положения штока электродвигателя, выход которого соединен с вторым входом сумматора, отличающаяся тем, что, с целью снижения величины несбалансированного момента самолета в режиме продольного плоскопараллельного смещения, она дополнительно снабжена соединенными последовательно датчиком числа М, функциональным преобразователем формирования коэффициента передачи по углу поворота канард от угла отклонения стабилизатора и блоком умножения, второй вход которого подключен к выходу сумматора, а выход связан с сервоприводом канард.
Си СУ у 0.70
Q.30 0,25
0.20 0.15
-0.65 -U60 -0.55
0.50
№
ОЛ 0,5 Of 0,1 0,8 0.9 1.0 7,7 7,2 ;,J It М
Фиг.З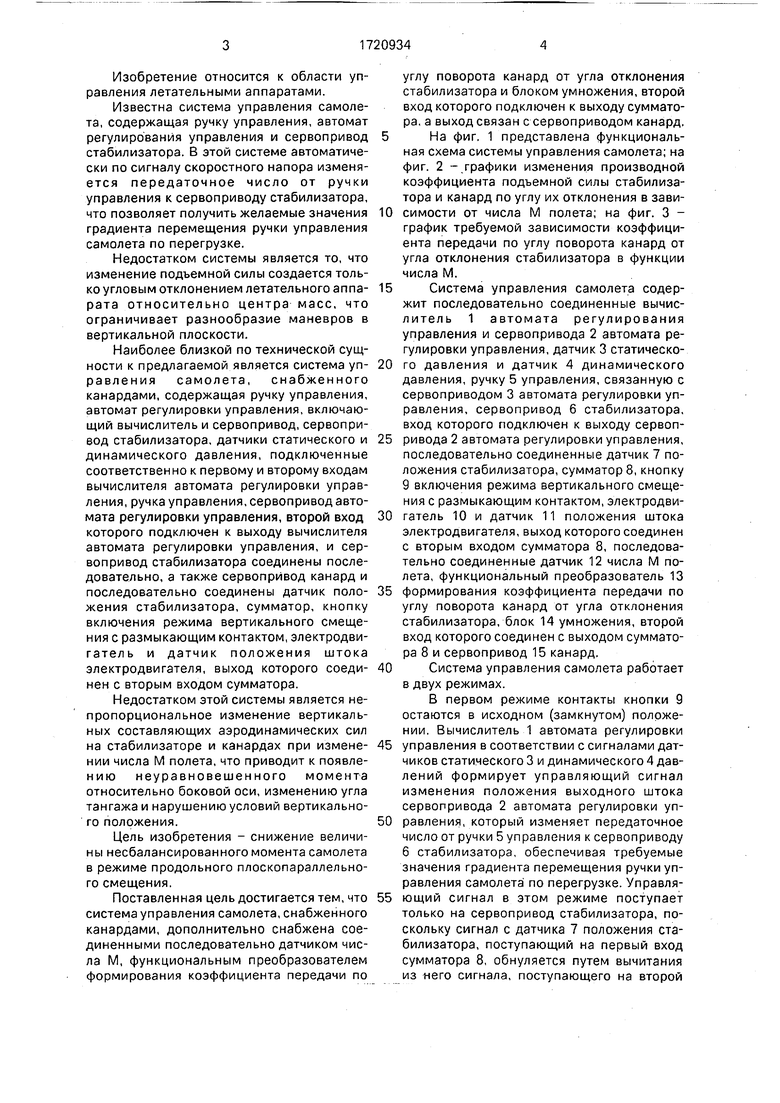
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2701628C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ ПОДЪЕМНОЙ СИЛОЙ САМОЛЕТА | 1991 |
|
RU2009963C1 |
Изобретение относится к управлению летательными аппаратами и может быть использовано на самолетах для повышения точности управления вертикальным смещением. Цель изобретения - уменьшение величины несбалансированного момента самолета в режиме плоскопараллельного смещения в вертикальной плоскости во всем рабочем диапазоне значений чисел М полета. Поставленная цель достигается тем, что в систему управления самолета, содержащую ручку управления 5, датчики статического 3 и динамического 4 давлений, вычислитель и сервопривод 2 автомата регулировки, сервопривод стабилизатора 6 и канала, кнопку управления режимом вертикального смещения с размыкающим 9 контактом, электродвигатель.10, датчик положения штока электродвигателя 11 и датчик положения стабилизатора, дополнительно введены датчик числа М полета 12 функциональный преобразователь 13 формирования коэффициента передачи по углу поворота канард от угла отклонения стабилизатора и блок умножения, позволяющие снизить величину несбалансированного момента в режиме вертикального смещения во всем рабочем диапазоне чисел М полета. 3 ил. СО С
| Виноградов Р | |||
| П., Мокрушин Л | |||
| В | |||
| Системы управления летательных аппаратов | |||
| Рига: РВВАИУим | |||
| Я | |||
| Алксниса, 1981, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Красовский А | |||
| А,, Вавилов Ю | |||
| А., Сучков А | |||
| А | |||
| Системы автоматического управления летательных аппаратов | |||
| М.: ВВИА им | |||
| Н | |||
| Е | |||
| Жуковского, 1986, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
