(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Программируемый логический контроллер | 1988 |
|
SU1647518A1 |
| Программируемый логический контроллер | 1985 |
|
SU1302242A1 |
| Процессор программируемого контроллера | 1988 |
|
SU1550515A2 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| Устройство для программного управления | 1990 |
|
SU1716482A1 |
| Устройство для контроля микропроцессорной системы | 1987 |
|
SU1474650A2 |
| Процессор программируемого контроллера | 1985 |
|
SU1406595A1 |
| Устройство для программного управления | 1984 |
|
SU1198461A1 |
| Устройство для программного управления намоточным станком | 1985 |
|
SU1259216A1 |
| Устройство для контроля цифровых блоков | 1985 |
|
SU1262504A1 |
Изобретение относится к автоматике, в частности к устройствам для программно- логического управления объектами дискрет- ного циклического действия. Целью изобретения является повышение быстродействия устройства. Это достигается тем, что в устройство введены блок анализа ситуаций, блок анализа состояний контроллера, регистр и второй блок сравнения, которые позволяют производить параллельный (одновременный) анализ всех возможных комбинаций условий перехода, что увеличивает быстродействие контроллера. Зил.
Изобретение относится к автоматике, в частности к устройствам для программно- логического управления объектами дискретного циклического действия.
Целью изобретения является повышение быстродействия устройства.
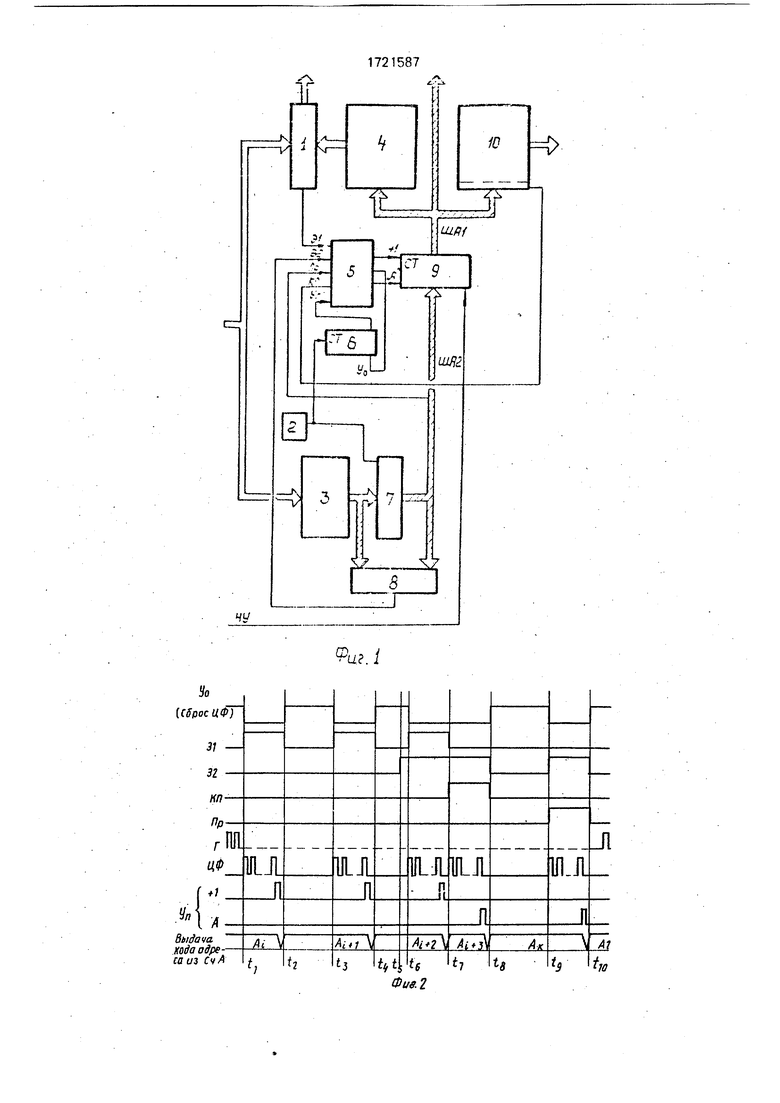
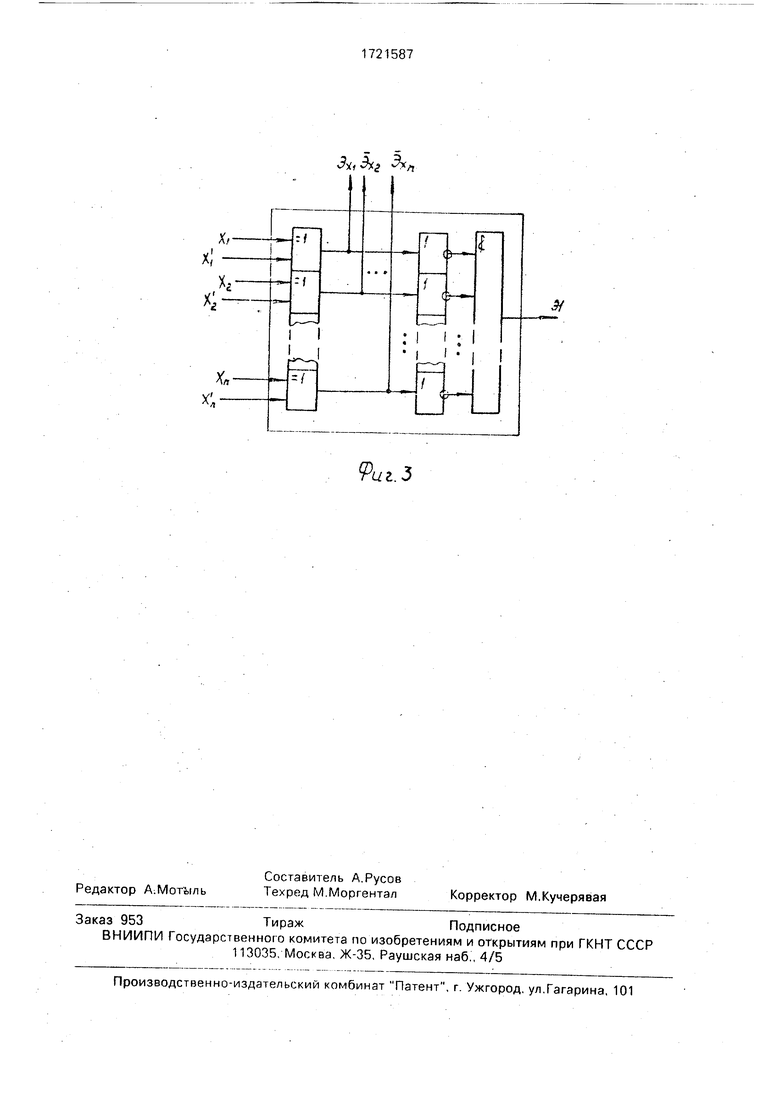
На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2 - временная диаграмма работы устройства; на фиг. 3 - схема блока сравнения.
Устройство содержит первый блок 1 сравнения, генератор 2 импульсов, блок 3 анализа ситуации, блок 4 памяти состояний, блок 5 анализа состояний контроллера, второй счетчик 6; регистр 7, второй блок 8 сравнения, первый счетчик 9 импульсов, блок 10 памяти команд.
Блок 4 памяти состояний и блок 10 памяти команд предназначены для хранения программы (в общем случае состоящей из К
подпрограмм) управления циклом работы обслуживаемого объекта. Программа управления циклом представляет собой последовательность строк, каждая из которых состоит из двух частей: комбинации команд на включение и отключение m механизмов, а также комбинации состояний, в которые должны прийти п датчиков в результате срабатывания m механизмов, при этом в блок 10 памяти команд записывается последовательность комбинаций команд на включение и отключение механизмов, а в блок 4 памяти состояний - последовательность комбинаций состояний, в которые должны прийти датчики, фиксирующие положения механизмов (датчики цикла) в результате выполнения соответствующих команд, причем в каждой строке блока ТО памяти команд один разряд выделен для программирования признака конца программы (КП). В качеVJ
ю ел
00
s|
стве блоков памяти могут применяться стандартные программируемые постоянные запоминающие устройства со встроен- ными узлами, дешифрации адреса и управления считыванием информации. Адресация блоков 4 и 10 осуществляется па- .раллельно при помощи второго 9 счетчика.
Блок 3 анализа ситуаций, который может быть выполнен, например, на программируемой логической матрице (ПЛМ), предназначен для хранения и отработки программы выбора начальных адресов подпрограмм, записанных в блоках памяти состояний и команд, при этом в блоке 3 записывается совокупность логических уравнений, аргументами которых являются состояния датчиков условий переходов (входов ПЛМ), а комбинации значений функций (состояний выходов ПЛМ) представляют собой коды адресов переходов к соответствующим подпрограммам, записанным в блоках памяти состояний и команд.
Первый блок 1 сравнения служит для параллельного (одновременного) сравнения комбинации фактических состояний датчиков цикла (Xi, XaХп) с их ожидаемыми значениями (X/, ). записанными в i-й строке блока памяти состояний. Первый блок сравнения может быть выполнен одним из известных способов, например так, как показано на фиг. 3, где 3xiЭха Эхп сигналы неэквивалентности
запрограммированных и фактических состояний датчиков.
Генератор 2 используется для синхронизации работы блоков устройства. Второй счетчик б служит для цифровой фильтрации управляющих сигналов, формируемых в блоке 5.
Регистр 7 используется для временного хранения комбинации состояний датчиков условий переходов, которая с помощью блока 8 сравнения проверяется на истинность, т. е, осуществляется анализ - является ли комбинация состояний, датчиков условий переходов, зафиксированная в регистре, устойчивой либо эта комбинация образовалась при кратковременном ложном срабатывании датчиков и (или) в результате действия помех на первом входе устройства.
Блок 5 (который может быть выполнен, например, на программируемой логической матрице) в зависимости от комбинации сигналов на его входах осуществляет логическое управление работой первого счетчика 9 (счетчика адресов). В качестве датчиков, подключаемых к устройству: могут быть использованы как собственно датчики, устанавливаемые на механизмах, так и органы управления и защиты, сигналы управления информационных и электрических блокировок от других устройств.
. Устройство работает следующим образом.
Установка устройства в исходное состояние осуществляется при помощи внешнего импульсного сигнала начальной установки
0 (НУ) и состоит в обнулении первого счетчика 9. Отработка управляющей программы состоит из двух этапов: анализа комбинации состояний датчиков условий переходов (состояния внешней среды) и формирования
5 начального адреса подпрограммы, а также собственно отработки выбранной подпрограммы, причем анализ состояния внешней среды осуществляется параллельно и независимо от отработки подпрограммы.
0В последней строке каждой подпрограммы не записываются комбинации состояний датчиков и команд управления, а записывается лишь признак конца подпрограммы КП, который используется в качестве
5 разрешения перехода устройства к отработке любой из записанных в блоки 4 и 10 памяти, состояний и команд. Для удобства пользователей признак КП может быть записан в нулевой строке блоков4 и 10 памяти
0 состояний и команд подпрограммы, что соответствует состоянию первого счетчика 9 (счетчика адресов) после отработки сигнала начальной установки.
Выбор начального адреса подпрограм5 мы, подлежащей отработке в данный момент времени, осуществляется при помощи блока 3 анализа ситуаций, который анализирует комбинации состояний датчиков условий переходов (состояний внешней среды).
0 В случае, если на его выходе образуется одна из запрограммированных комбинаций, то эта комбинация очередным импульсом генератора 2 заносится в регистр 7 и поступает на информационный вход второ5 го счетчика 9 и на второй вход блока 8 срав- нения. На первый вход этого блока поступает комбинация сигналов с выходов блока 3 анализа ситуаций. При совпадении комбинаций сигналов на первом и втором
0 входах блока 8 сравнения на его выходе образуется сигнал Эквивалентность 2 (Э2), который подается на второй вход блока 5. В блоке 5 записываются следующие логические уравнения:
5Э2КППР + Э2ПР + КППРЭ1 У0:
Э2КППРУП + Э2ПРУП А; Э1КППРУ„ +1,
где Эт - сигнал эквивалентности с второго выхода первого блока 1 сравнения; ПР - признак прерывания;
Уо - сигнал установки в О второго счетчика 6;
Уп - сигнал Переполнение на выходе второго счетчика 6.
В случае, если выполняется логическое уравнение
Э2КППР У0,
то с установочного входа счетчика б снимается сигнал обнуления, разрешая тем самым счет импульсов генератора 2, поступающих на счетный вход счетчика 6, который используется для многократного подтверждения (контроля) истинности сигнала УС,, на втором выходе блока 5 анализа состояний контролера. Длительность многократного контроля выбирается в зависимости от конкретных условий применения устройства. В случае, если появление сигнала на установочном входе счетчика б имеет случайный характер, (например, вызвано помехой на первом входе устройства), то восстановление сигнала У0 на установочном входе возвращает счетчик 6 в нулевое состояние. Если же появление сигнала Уо на установочном входе счетчика 6 не является случайным, то по завершении многократного контроля на выходе счетчика 6 формируется импульс переполнения Уп, который поступает на вход блока 5 анализа состояний контроллера, при этом, если реализуется логическое уравнение
Э2КППРУП А.
то на выходе блока 5 появляется сигнал Адрес (А), по которому счетчик 9 осуществляет переадресацию блоков 4 и 10 памяти состояний и команд на первый адрес выбранной подпрограммы. При этом с выхода блока 10 памяти команд на управляемый объект выдаются записанные на данной строке подпрограммы команды управления, срабатывают соответствующие механизмы, а следовательно, и датчики, а образовавшаяся при этом комбинация фактических состояний датчиков цикла сравнивается при помощи блока 1 сравнения с комбинацией состояний, прочитанной из блока 4 памяти состояний. При совпадении фактической комбинации состояний с запрограммированной на втором выходе блока 1 сравнения появляется сигнал Эквивалентность 1 (Э1), поступающий на первый вход блока 5 анализа состояний контроллера. Если при этом в блоке 5 реализуется логическое уравнение
Э1КППР У0,
то вновь включается в работу цифровой фильтр, построенный на счетчике 6 и при многократном подтверждении истинности сигнала У0 в блоке 5 анализа состояний кон- троллера 5 реализуется логическое уравнение
Э1КП ПРУп +1,
в результате чего на выходе блока 5 появляется сигнал +1, увеличивающий содержимое счетчика 9 на единицу. При этом происходит адресация блоков 4 и 10 на следующий шаг подпрограммы. Далее процесс отработки
строк (шагов) подпрограммы выполняется аналогично описанному.
В случае, если на каком-либо шаге подпрограммы произойдет выход из строя или поломка механизма или датчика, переход к
следующей строке подпрограммы не происходит, так как не может сработать блок 1 сравнения, с выхода которого выдается информация о неэквивалентности состояния i-ro датчика (датчиков) запрограммированному (запрограммированным) на данной строке программы. Указанная информация может быть использована для автоматической функциональной диагностики работы управляемого объекта. Кроме того, состояние второго счетчика 9 (номер строки программы) выдается на второй выход устройства и также может использоваться для диагностики. При устранении выявленной неисправности устройство автоматически продолжает отработку последующих строк подпрограммы. При отработке последнего шага подпрограммы на выходе блока 10 памяти команд появляется сигнал Конец подпрограммы (КП), блокирующий
срабатывание блока 5 анализа состояний контроллера 5 по сигналу Э1 до перехода к отработке следующей подпрограммы.
Переходы в программе реализуются по- еле отработки очередной подпрограммы, т. е. в строго детерминированные моменты времени. Вместе с тем в реальных объектах при выходе из строя механизмов или датчиков могут образовываться комбинации со- стояний механизмов (а следовательно, и датчиков), которые являются запрещенными, т. е. такими, при которых в управляемых объектах могут складываться аварийные ситуации, требующие немедленного вмеша- тельства в процесс управления. Для реакции устройства на аварийные ситуации один из выходов блока 3 анализа ситуаций и один разряд .регистра 7 и шины адреса выделен для фиксации и выдачи на третий вход блока 5 сигнала Признак прерывания
(ПР), при этом в блоке 5 реализуется логическое уравнение
Э2ПР У0,
а после контроля на цифровом фильтре и уравнение
Э2ПРУП А,
в результате чего во второй счетчик 9 без ожидания конца отработки рабочей подпрограммы заносится адрес перехода к прерывающей подпрограмме, соответствующей сложившейся аварийной ситуации на управляемом объекте.
Описанный принцип иллюстрируется временной диаграммой работы устройства (фиг. 2), где отрезки времени ti -t соответствуют последовательной отработке строк подпрограммы;
t - te переход к новой (рабочей) подпрограмме;
tg - tio - переход к аварийной подпрограмме.
Формула изобретения Программируемый логический контроллер параллельного действия, содержащий первый блок сравнения, генератор импульсов, блоки памяти состояний и команд, первый и второй счетчики импульсов, причем первый вход первого блока сравнения является первым входом устройства, к второму входу первого блока сравнения подключен выход блока памяти состояний, а первый выход первого блока сравнения является первым выходом устройства, установочный
вход первого счетчика импульсов соединен с вторым входом устройства, а выход первого счетчика импульсов подключен к адресным .входам блоков памяти состояний и
команд и является вторым выходом устройства, третий выход которого является первым выходом блока памяти команд, отличающийся тем, что, с целью повышения быстродействия устройства, в него введены
блок анализа ситуаций, блок анализа состояний контроллера, регистр и второй блок сравнения, причем первый вход устройства соединен с входом блока анализа ситуаций, выход которого соединен с информационным входом регистра и первым входом второго блока сравнения, второй вход которого соединен с выходом регистра и с информационным входом .первого счетчика импульсов, первый суммирующий и второй
адресный входы которого соединены с первым и вторым выходами блока анализа состояний контроллера, третьим выходом соединенного с установочным входом второго счетчика импульсов, счетный вход которого и вход записи регистра подключены к выходу генератора импульсов, выход второго счетчика импульсов подключен к первому входу блока анализа состояний контроллера, второй вход которого подключен к второму выходу первого блока сравнения, третий вход блока анализа состояний контроллера соединен с выходом второго блока сравнения, четвертый вход блока анализа состояний контроллера соединен с одним из разрядов регистра, а пятый вход блока анализа состояний контроллера соединен с вторым выходом блока памяти команд.
/
д;. f.
ED
$
o,
u. i
h
1C
ТЕ
U3T
/7/
y/
31
ol
UJfid.
i-N
z
Рцг.З
| Устройство для программного управления намоточными станками | 1979 |
|
SU857933A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программируемый логический контроллер | 1985 |
|
SU1302242A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
