Изобретение относится к поточно транспортным системам, в частности к способам контроля работы механизмов, имеющих движущиеся металлические узлы с воздушными зазорами, и может быть использовано на предприятиях переработки зерна.
Известны способы контроля скорости движения цепных конвейеров, в которых используют различные варианты механического воздействия на конечный выключатель, отключающий двигатель при опасности поломки деталей и узлов конвейера (см.патент США № 368068G, МКИ В 65 G 43/00 от 08.1982 г., авт.св.СССР №1133189, МКИ В 65 G 43/02 от 07.01.85 г.).
Общими недостатками известных способов является сравнительно низкая надежность и эффективность работы из-за конструктивной сложности реализующих их устройств.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ контроля движения цепного органа конвейера, включающий взаимодействие с цепными органами одного конца физического маятника, взаимодействие свободного конца физического маятника с электромеханическим преобразователем, получение сигнала в электроцепи и управление приводом (см.авт.св.СССР № 291846, В 65 G 23/00 от 01.1971 г.).
VJ
ю ел со XI
Недостатками известного способа явля 1отся низкие эффективность и надежность, так как электрический сигнал на останов конвейера формируется только при одном условии, а именно при вертикальном поло- жении физического маятника, которое он может занять только при провисании холостой ветви конвейера в результате его обрыва.В то же время при транспортировке сыпучих материалов, например, при помо- щи скребковых конвейеров в комбикормовых и зерновых производствах характерно создание аварийных ситуаций за счет переполнения и дальнейшего забивания короба конвейера транспортируемым материалом. При этом физический маятник по известному способу не в состоянии занять вертикальное положение даже при обрыве транспортера и останова конвейера в данной аварийной ситуации не происходит.
Целью изобретения является повышение эффективности и надежности в работе.
Для этого в способе контроля движения цепного органа конвейера, включающем взаимодействие с цепным органом одного конца физического маятника, взаимодействие свободного конца физического маятникасэлектромеханическимпреобразователем, получение сигнала в электроцепи и управление приводом, обес- печивают постоянный контроль скорости движения цепного органа преобразованием поступательного движения цепного органа в колебательное движение свободного конца физического маятника и получают прерывистый сигнал в электроцепи, при этом в электроцепь включают реле скорости, на вход которого подают прерывистый сигнал и постоянное напряжение, а на выходе получают для управления приводом управляющий сигнал переменного тока.
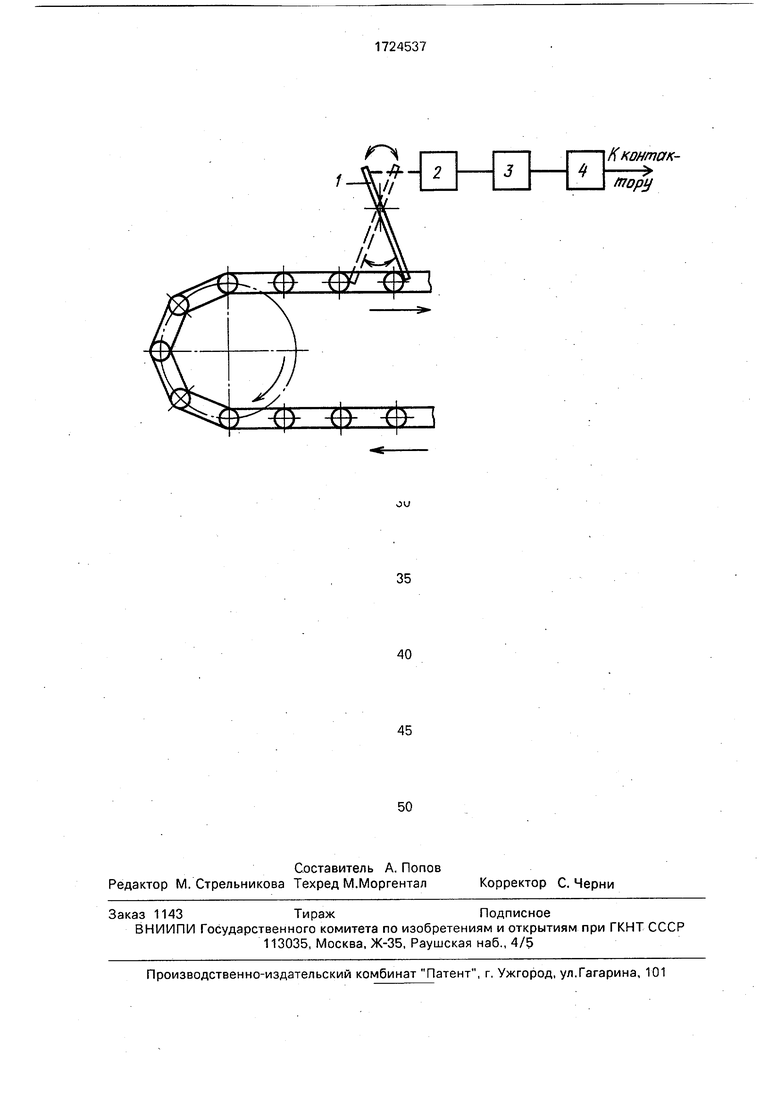
На чертеже показана схема реализации предлагаемого способа.
Над цепным органом конвейера устанавливают физический маятник 1 так, что его нижний конец взаимодействует с цепным органом. При таком расположении маятника частота его колебаний определяется скоростью движения цепного органа, а вынуждающей силой является результат взаи- модействия межзвенных шарнирных соединений цепного органа с нижним концом маятника 1. Свободный конец маятника 1 располагают так, что он взаимодействует с электромеханическим преобразователем
2. При движении цепного органа происходит преобразование его поступательного движения в колебательное движение свободного конца физического маятника. К электромеханическому преобразователю 2 подключают источник 3 постоянного напряжения и таким образом получают прерывистый сигнал в электроцепи. Частота основной волны переменных составляющих этого сигнала равна частоте колебаний свободного конца физического маятника 1. В электроцепь включают реле 4 скорости, на вход которого подают прерывистый сигнал и постоянное напряжение, а на выходе получают для управления приводом управляющий сигнал. Реле скорости срабатывает не только при обрыве цепного органа, ведущем к провисанию ветвей транспортера, но и при забивании короба конвейера транспортируемым материалом, так как при этом ко- лебания маятника прекращаются и соответственно исчезает переменная составляющая на входе реле скорости, что приводит к его срабатыванию и останову конвейера.
Экспериментальные исследования показали, что предлагаемый способ обеспечивает постоянный надежный контроль скорости движения цепного органа.
Предлагаемый способ может быть использован для контроля работы любых механизмов, имеющих движущиеся металлические узлы.
Формулаизобретения
Способ контроля движения цепного органа конвейера, включающий взаимодействие с цепным органом одного конца физического маятника, взаимодействие свободного конца физического маятника с электромеханическим преобразователем, получение сигнала в электроцепи и управление приводом, отличающийся тем, что, с целью повышения эффективности и надежности в работе за счет обеспечения постоянного контроля скорости движения цепного органа, поступательное движение цепного органа преобразуют в колебательное движение свободного конца физического маятника и получают прерывистый сигнал в электроцепи, при этом в электроцепь включают реле скорости, на вход которого подают прерывистый сигнал и постоянное напряжение, а на выходе получают для управления приводом управляющий сигнал переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля движения цепного органа конвейера | 1990 |
|
SU1724538A1 |
| Устройство для контроля движения ряда изделий | 1980 |
|
SU981142A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2423280C1 |
| Устройство управления рабочим органом землеройной машины | 1979 |
|
SU901415A1 |
| Способ контроля качества соединения шнура с арматурой и устройство для его осуществления | 1987 |
|
SU1515234A1 |
| Реле пробуксовки ленточного конвейера | 1972 |
|
SU495248A2 |
| ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ И ГИДРАВЛИЧЕСКИМ ПРИВОДОМ РАБОЧЕГО ОРГАНА (ВАРИАНТЫ) | 2019 |
|
RU2721633C1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| КОЛЕБАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2006173C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
Способ контроля движения цепного органа конвейера. Использование: изобретение относится к поточно-транспортным системам, в частности к способам контроля работы механизмов, имеющих движущиеся металлические узлы с воздушными зазорами, и может быть использовано на предприятиях переработки зерна. Сущность изобретения: способ включает взаимодействие с цепным органом одного конца физического маятника, взаимодействие свободного конца физического маятника с электромеханическим преобразователем, получение сигнала в электроцепи и управление приводом. Повышение эффективности и надежности в работе за счет обеспечения постоянного контроля скорости движения цепного органа достигается путем.преобразования движения цепного органа в колеба- тельное движение свободного конца физического маятника и получения при этом прерывистого сигнала в электроцепи. В электроцепь включают реле скорости, на вход которого подают прерывистый сигнал и постоянное напряжение, на выходе получают для управления приводом управляющий сигнал переменного тока. 1 ил. (Л С
| Патент США № 3680685 | |||
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОСТАНОВА ПРИВОДА ТРАНСПОРТЕРА | 0 |
|
SU291846A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
