Изобретение относится к общему машиностроению, в частности к автооператорам.
Целью изобретения является расширение технологических возможностей путем обеспечения программируемых движений.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Колонна 1 жестко крепится посредством плиты 2 к корпусу передней или задней бабки станка. К плите 2 крепится шаровая опора 3 цилиндра 4, соединенного штоком 5 с шаровой опорой 6, закрепленной к корпусу 7 механизма зажима изделий 8 и заготовок 9. К корпусу 7 подпружиненно на осях 10 закреплены восемь захватов 11 и две шестерни-зажимы 12 с эксцентрическими закругленными концами, а также цилиндр 13 с рейками на обоих концах штоков 14, зацепляющихся с шестернями. Корпус 7 посажен на цилиндрические шейки 15 консоли 16 и фиксируется посредством подпружиненного стопора 17, управляемого магнитом 18 в двух положениях: вертикальном (у станка) и горизонтальном (над транспортером). Консоль 16 закреплена в корпусе 19, посаженном на цилиндрическую поверхность колонны 1, посредством опор 20 качения и ролика 21, жестко закрепленных к корпусу 19 с возможностью регулирования и входа ролика в паз 22, показанный в развертке на фиг. 2. Манипулятор уравновешен грузом 23 и тормозится электротормозом 24. Движение идет по пазу 22 до верха. Ролик подпирается стопором 25.
Манипулятор работает следующим образом.
При подаче давления в нижнюю полость цилиндра механизма захвата с зажимными заготовками 8 поднимается вместе с консолью 16, корпусом 19, роликом 21 по пазу 22 вертикально, оставляя в призмах транспортера изделия, разжатые посредством цилиндра 13, реек и шестерен-зажимов 12. Под действием привода цилиндра 4 и гравитации ролик 21 идет по нижней наклонной ветви паза 22 и включается электромагнит 18, вытаскивает стопор 17 и одновременно с поворотом к станку механизм захвата разворачивается в вертикальное положение (фиг. 3) на 90° до упора, где отключается электромагнит и фиксирует его стопором 17. Дальнейшим поворотом консоли по горизонтальному участку паза 22 механизм захвата выходит на ось центров двухшпин- дельного станка и своими свободными захватами принимает изделия, выводимые из патронов в центрах, и зажимает их посредством цилиндра 13, реек и шестерен-зажимов 12 эксцентриком. В этом положении манипулятор удерживается электротормозом 24 и уравновешен грузом 23.
После развода центров подается команда на подъем, разжатие тормоза 24, и заготовки 8 выносятся на линию центров станка, ролик 21 поддерживается стопором 25, а манипулятор - электротормозом 24.
Сведением центров и вводом заготовок
в патроны подается команда на подачу давления в верхнюю полость цилиндра 4 и отключение тормоза 24. Манипулятор поворачивается обратно и, переходя на наклонную поворотную часть паза, разворачивается механизм захвата в горизонтальное положение. Далее, опускаясь, манипулятор опускает на транспортер изделия 9, разжимает их и зажимает новые заготовки. Цикл повторяется.
Формула изобретения Автооператор, содержащий колонну, установленный на ней с возможностью поступательных и поворотных движений барабан, имеющий копирный паз, в котором размещен ролик, закрепленный на колонне, а также захватную головку и силовой цилиндр привода движений захватной головки, отличающийся тем, что, с целью
расширения технологических возможностей путем обеспечения программируемых движений, он снабжен фиксаторами и консолью, жестко закрепленной на барабане, на конце которой установлена захватная головка с возможностью ее ротации, при этом силовой цилиндр шарнирно закреплен на колонне, а его шток шарнирно связан с корпусом захватной головки, а фиксаторы размещены на барабане и захватной головке с
возможностью фиксации их крайних положений.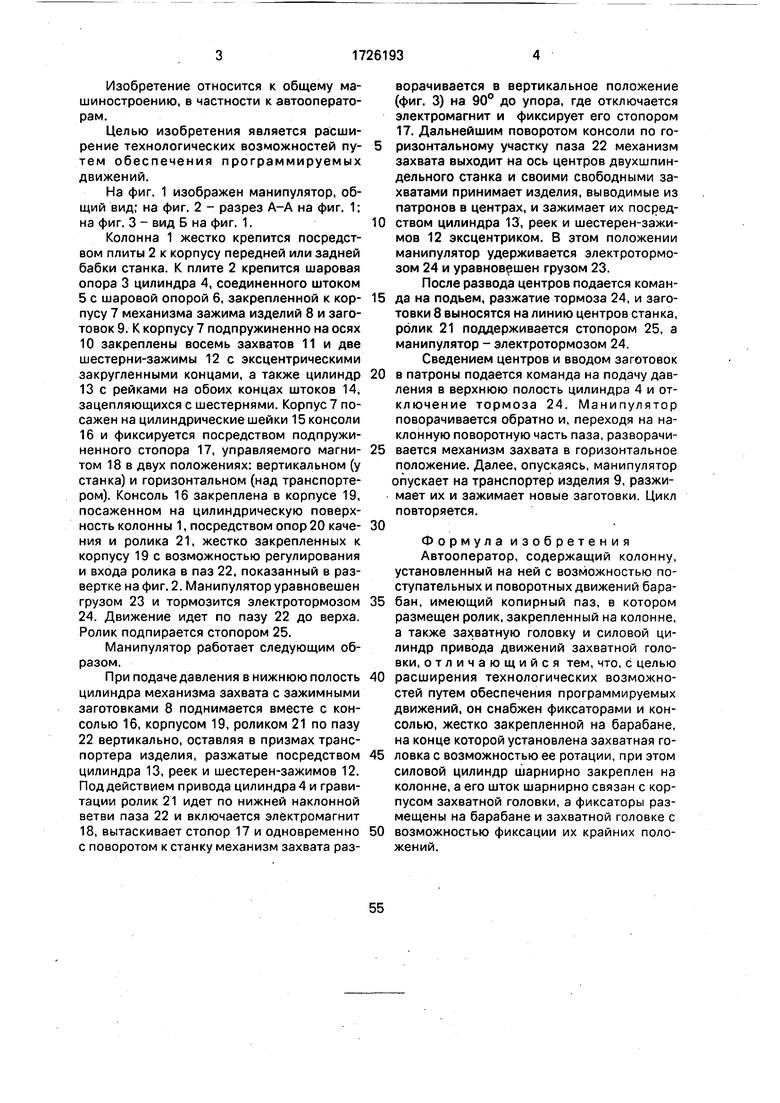
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ ТИПА ВАЛОВ ИЛИ СТАКАНОВ | 1969 |
|
SU237539A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| АВТООПЕРАТОР | 1972 |
|
SU331878A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Способ штамповки деталей из полосового материала и установка для его осуществления | 1987 |
|
SU1586826A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
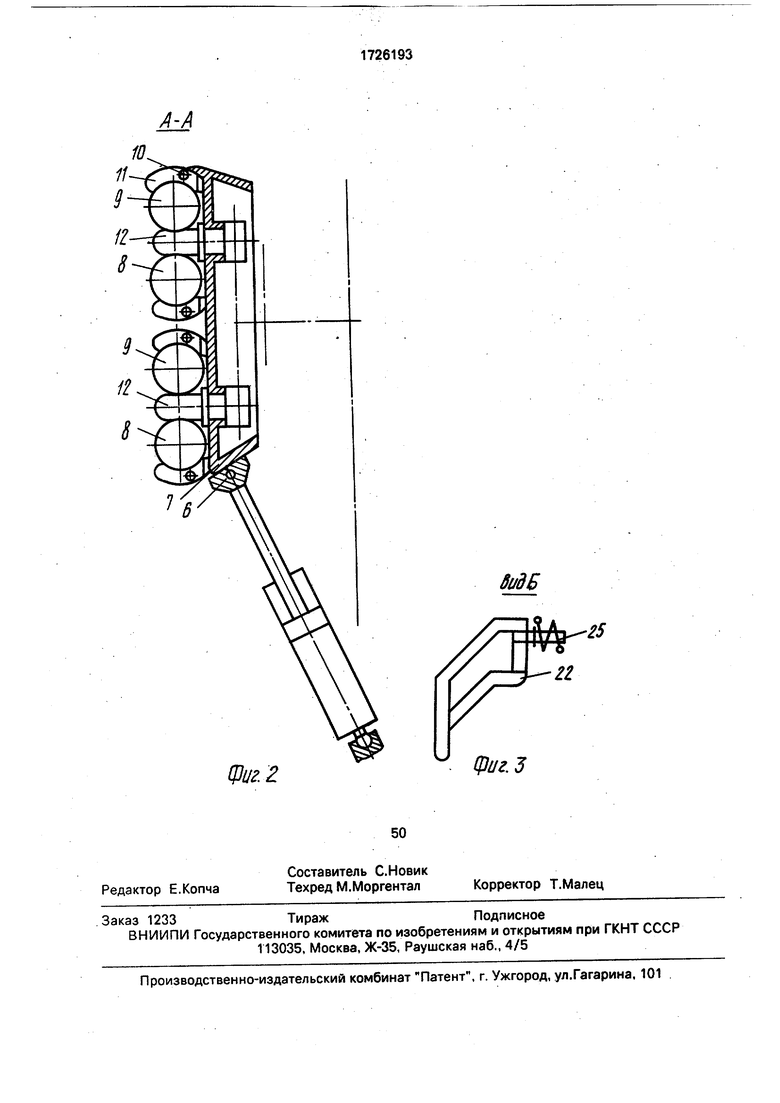
Изобретение относится к общему машиностроению, в частности к автооператорам. Целью изобретения является расширение технологических возможностей путем обеспечения программируемых движений. Под действием силового цилиндра 4 при включенном электромагните 18, который вытаскивает стопор 17, одновременно с разворотом корпуса 19, взаимодействующим профильным пазом по ролику 21, поворачивается механизм зажима 7 в вертикальной плоскости. В зависимости от включения электромагнитов 24,25,18 обеспечиваются программируемые движения. 3 ил.
| АВТООПЕРАТОР ПОВОРОТНЫЙ ДВУХЗАХВАТНЫЙ | 0 |
|
SU275672A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
