И
ь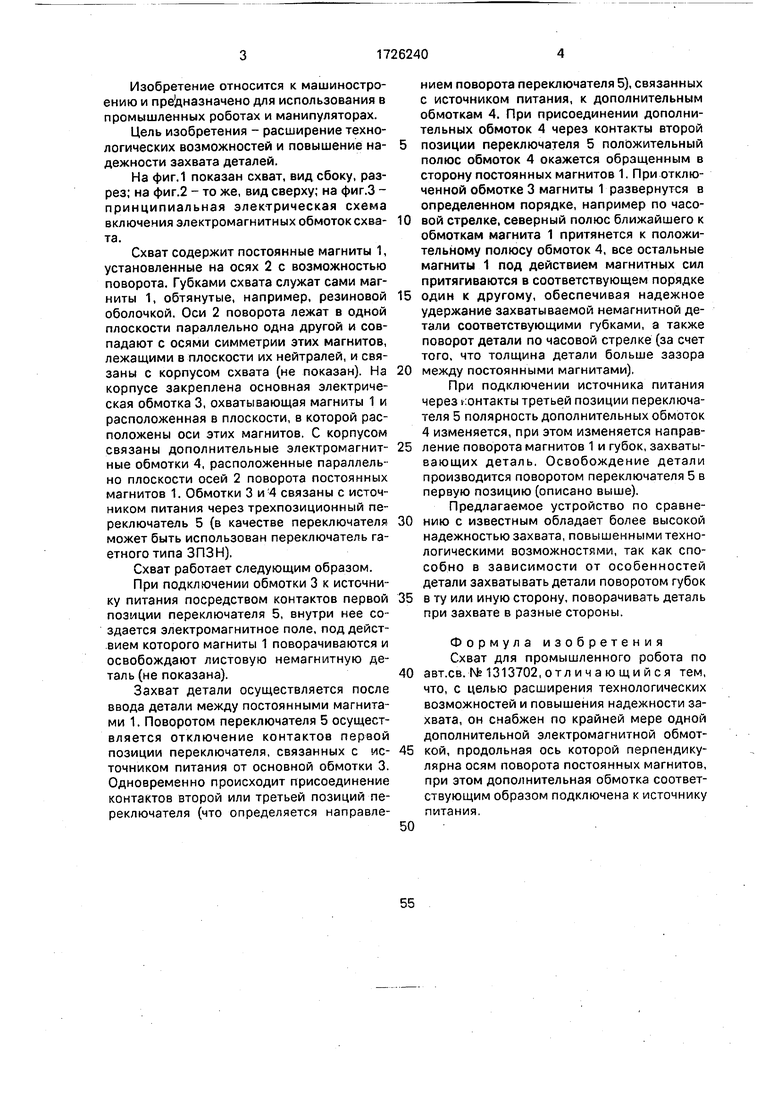
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват В.Г.Вохмянина для промышленного робота | 1986 |
|
SU1313702A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Схват промышленного робота | 1983 |
|
SU1140945A1 |
| Устройство для ориентации схвата промышленного робота | 1985 |
|
SU1386447A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Схват промышленного робота | 1986 |
|
SU1433792A1 |
Использование: в промышленных роботах и манипуляторах. Сущность изобретения: схват снабжен дополнительными электромагнитными обмотками 4, расположенными параллельно плоскости осей 2 поворота постоянных магнитов. При захвате детали переключатель устанавливается так, что основная обмотка 3 обесточена, а дополнительные включены, причем полярность включения дополнительных обмоток 4 определяется позицией переключателя, что определяет разное направление поворота постоянных магнитов 1, а значит и детали при захвате. 3 ил.
рхг1
к
0
ю
ь
Ю
1КЭ
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах и манипуляторах.
Цель изобретения - расширение технологических возможностей и повышение надежности захвата деталей.
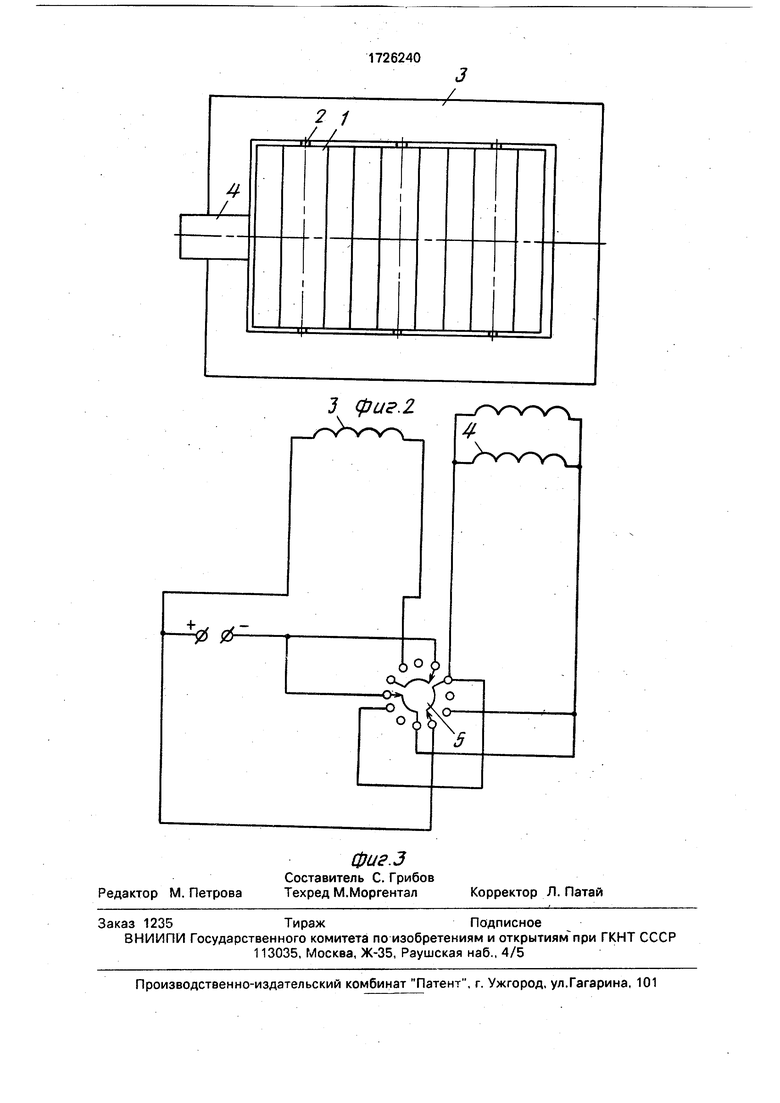
На фиг.1 показан схват, вид сбоку, разрез; на фиг.2 - то же, вид сверху; на фиг.З - принципиальная электрическая схема включения электромагнитных обмоток схва- та.
Схват содержит постоянные магниты 1, установленные на осях 2 с возможностью поворота. Губками схвата служат сами магниты 1, обтянутые, например, резиновой оболочкой. Оси 2 поворота лежат в одной плоскости параллельно одна другой и совпадают с осями симметрии этих магнитов, лежащими в плоскости их нейтралей, и связаны с корпусом схвата (не показан). На корпусе закреплена основная электрическая обмотка 3, охватывающая магниты 1 и расположенная в плоскости, в которой расположены оси этих магнитов. С корпусом связаны дополнительные электромагнитные обмотки 4, расположенные параллельно плоскости осей 2 поворота постоянных магнитов 1. Обмотки 3 и-4 связаны с источником питания через трехпозиционный переключатель 5 (в качестве переключателя может быть использован переключатель га- етноготипа ЗПЗН).
Схват работает следующим образом.
При подключении обмотки 3 к источнику питания посредством контактов первой позиции переключателя 5, внутри нее создается электромагнитное поле, под дейст- .вием которого магниты 1 поворачиваются и освобождают листовую немагнитную деталь (не показана).
Захват детали осуществляется после ввода детали между постоянными магнитами 1. Поворотом переключателя 5 осуществляется отключение контактов первой позиции переключателя, связанных с источником питания от основной обмотки 3. Одновременно происходит присоединение контактов второй или третьей позиций переключателя (что определяется направлением поворота переключателя 5), связанных с источником питания, к дополнительным обмоткам 4. При присоединении дополнительных обмоток 4 через контакты второй
позиции переключателя 5 положительный полюс обмоток 4 окажется обращенным в сторону постоянных магнитов 1. При отключенной обмотке 3 магниты 1 развернутся в определенном порядке, например по часовой стрелке, северный полюс ближайшего к обмоткам магнита 1 притянется к положительному полюсу обмоток 4, все остальные магниты 1 под действием магнитных сил притягиваются в соответствующем порядке
один к другому, обеспечивая надежное удержание захватываемой немагнитной детали соответствующими губками, а также поворот детали по часовой стрелке (за счет того, что толщина детали больше зазора
между постоянными магнитами).
При подключении источника питания через контакты третьей позиции переключателя 5 полярность дополнительных обмоток 4 изменяется, при этом изменяется направление поворота магнитов 1 и губок, захватывающих деталь. Освобождение детали производится поворотом переключателя 5 в первую позицию (описано выше).
Предлагаемое устройство по сравнению с известным обладает более высокой надежностью захвата, повышенными технологическими возможностями, так как способно в зависимости от особенностей детали захватывать детали поворотом губок
в ту или иную сторону, поворачивать деталь при захвате в разные стороны.
Формула изобретения Схват для промышленного робота по
авт.св. № 1313702, отл и ч а ю щи и ся тем, что, с целью расширения технологических возможностей и повышения надежности захвата, он снабжен по крайней мере одной дополнительной электромагнитной обмоткой, продольная ось которой перпендикулярна осям поворота постоянных магнитов, при этом дополнительная обмотка соответствующим образом подключена к источнику питания.
2- 1
Lj.
| Схват В.Г.Вохмянина для промышленного робота | 1986 |
|
SU1313702A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
