; И:к)бретоиис относится к маппшостр и-- Н1ПО. i частности к захватн1)1М усгр)йст вам промышленных роботов и манипч ля ю|)ОВ,
Ц(М1, 11.«)бретения упрощенно коист- рукцн.
На (j)H; . 1 схематически изображен прел- .чагаемыГ схват при обесгоченной обмотке с :и1хвач(чп1ой деталью, общий вид; на (). 2то же, при вк;1юченной обмотке.
CxB.Sr.содержит корпус (не показан), на котором с возможностью поворота установлены ноетоянн ые нагниты 1, оси 2 поворота которых . в одной нлоскости параллельно друг дру,гу и совпадают с осями симметрии этих магнитов, лежащими в плоскости нх нейтралей, и электрическую обмотку 3, охватывающую магниты 1 и расположенную параллельно плоскости, в которой расположены оси этих магнитов. Позицией 4 обозначена захватываемая деталь.
Схват работает следуюилим образом.
При обесточенной обмотке 3 магниты 1 нод действием магнитных еил притягиваютея один к другому, обеспечивая надежное удержание захватываемой немагнитной детали 4. В результате нодключе}{ия к источнику ни- тяния обмотки 3 внутри нее создается
0
5
0
5
-.:ск ) пс С ноле, под действием кото- . о х огн гг. I поворачиваются так, что еи- .lo ibii Л1П1ПП их магнитного поля располагаются идо. П) силовых линий электромагнитного но.ля, создаваемого обмоткой 3. Для нри;1,ания магнитам 1 э.мастичности они могут быть, например, обрезинены ( не по- ).
Формула изобретения
Схват для нромьпнленного робота, содержащий корпус, на котором с возможностью поворота установлены постоянные магниты, связанные с губками схвата, и электрическую обмотку, установленную с возможностью взаимодействия электромагнитного поля, создаваемого этой обмоткой, с полем постоян- пых магнитов, отличающийся тем, что, с це- .П:.ю унрощения конструкции, оси поворота постоянных магнитов лежат в одной плоскости параллельно друг другу и совпадают с осями симметрии этих магнитов, лежащи.ми в нлоскости, совпадающей с нейтральной н.лоскостью магнитов, а электрическая обмотка охватывает постоянные магниты и распо- параллельно плоскости, в которой рас 1оложены их оси поворота, при этом губки схвата расположены на поверхностях полюсов постоянных магнитов.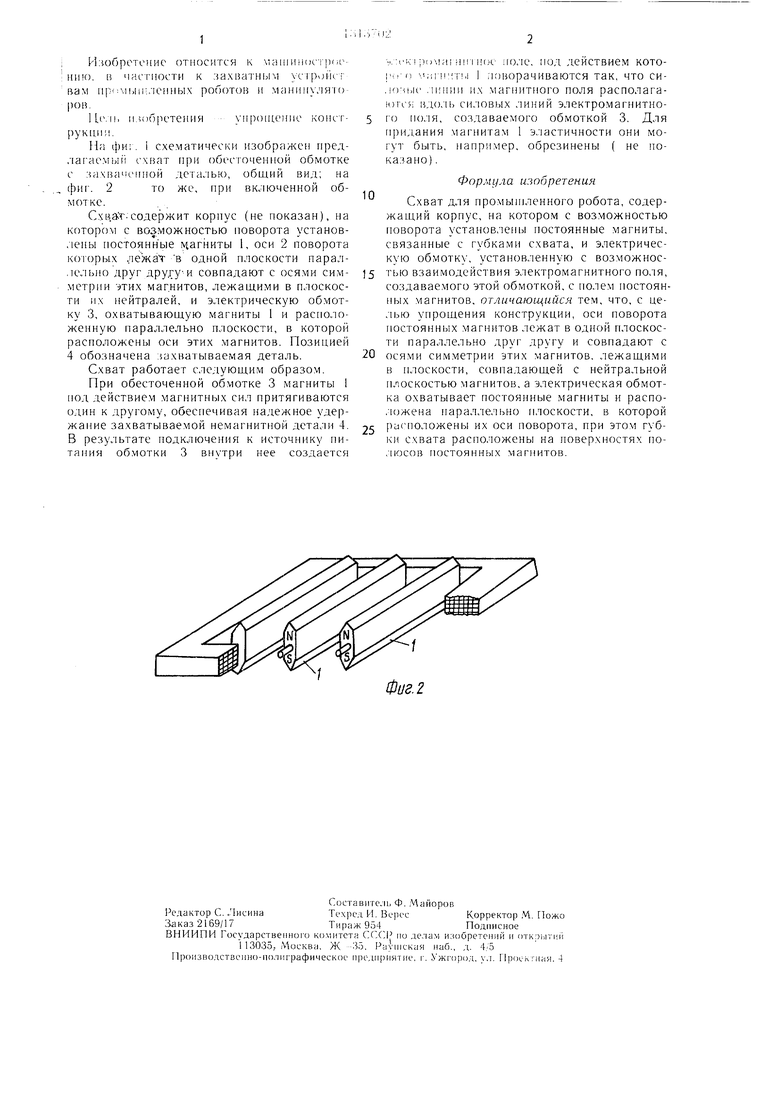
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват для промышленного робота | 1989 |
|
SU1726240A2 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1357221A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761461A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761462A1 |
| Схват манипулятора | 1985 |
|
SU1276486A1 |
| Схват манипулятора | 1985 |
|
SU1321583A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов и манипуляторов. При обесточенной обмотке 3, охватывающей постоянные магниты 1, они притягиваются друг к другу, обеспечивая удержание немагнитной детали 4. При подключении обмотки 1 к источнику питания внутри нее создается электромагнитное поле, под действием которого магниты 1 поворачиваются и деталь 4 освобождается. 2 ил. (Л Wus.l 00 со о 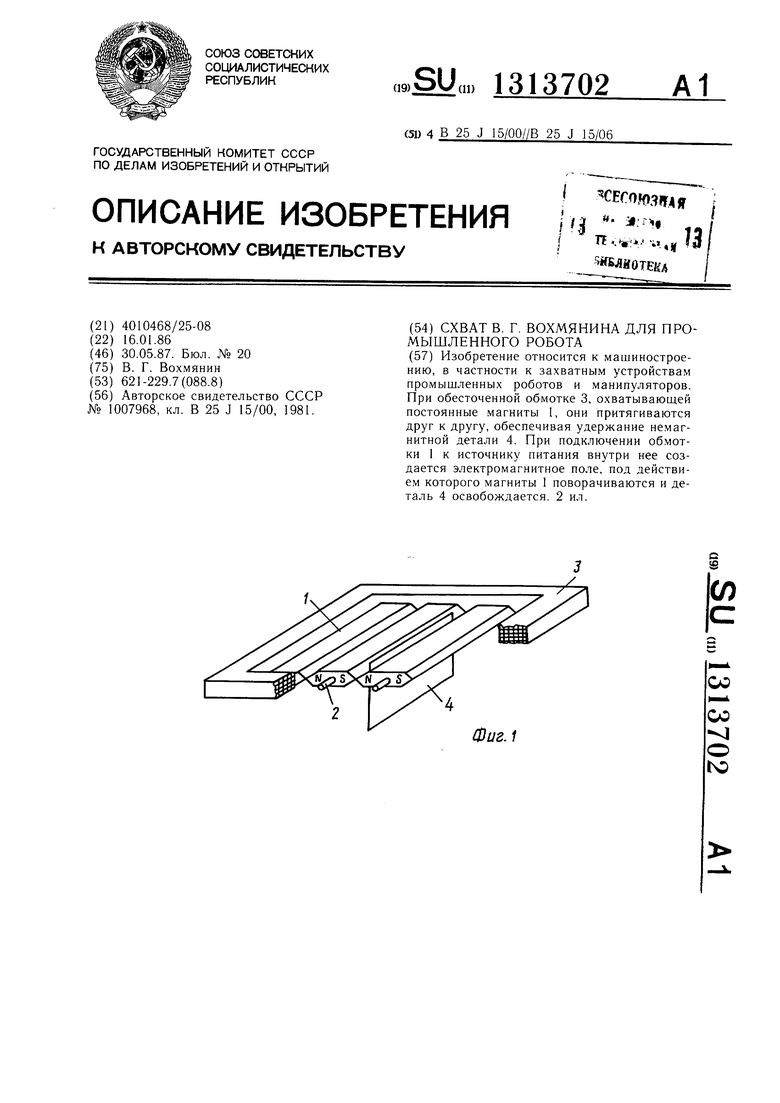
Фиг. 2
| Захват | 1981 |
|
SU1007968A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
