Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов.
Цель изобретения - расширение технологических возможностей.
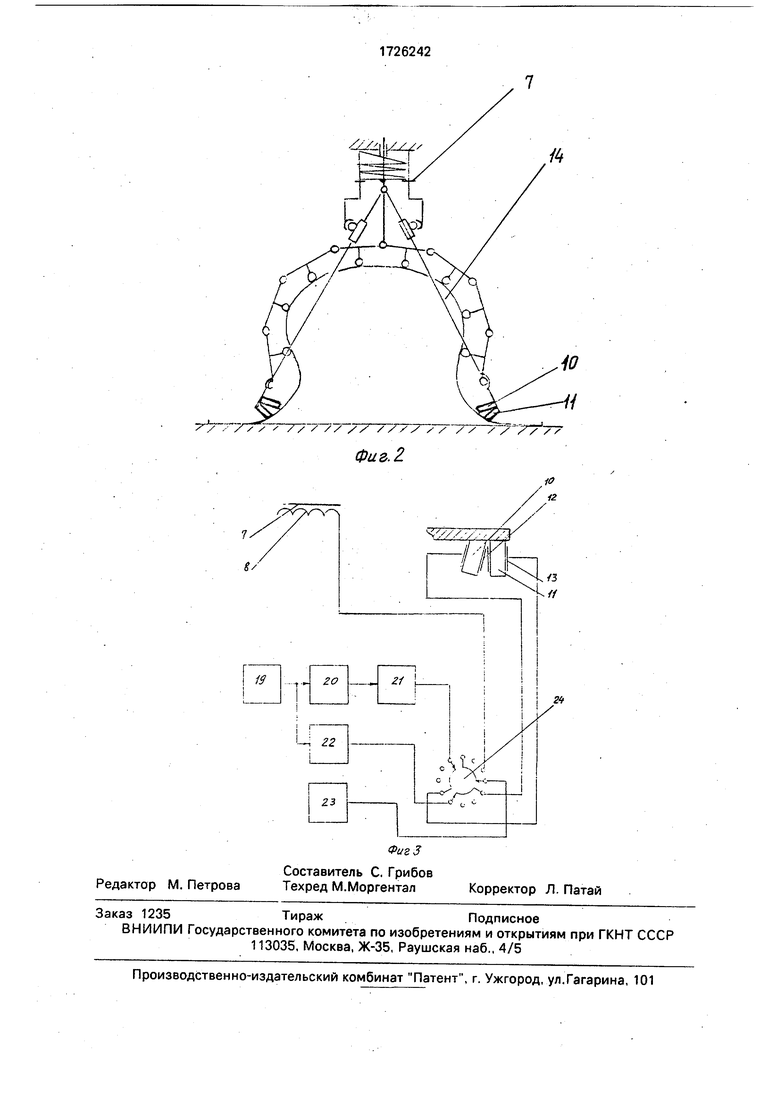
На фиг.1 показана конструкция захватного устройства; на фиг.2 - схема захвата плоских листовых деталей; на фиг.З - структурная схема системы управления.
Захватное устройство содержит корпус 1, шарнирно соединенные пальцы, выполненные в виде шарнирно соединенных звеньев 2, на которых установлены с возможностью вращения ролики 3. Шарнир 4 соединения пальцев связан со штоком 5, подпружиненным относительно корпуса пружиной 6. На корпусе 1 установлены фиксаторы (защелки 7 с электромагнитными обмотками 8 привода, подпружиненные пружинами 9). На последних звеньях 2 паль- цев закреплены линейные вибродвигатели в виде двух пластин 10 и 11 из пьезокерами- ки с электродами 12 и 13. С этими же звеньями шарниром 15 связаны тяги 14, которые с другой стороны шарниром 16 связаны со штоком 5, а с корпусом 1 тяги 14 связаны втулками (двухподвижными кинематическими парами 17). Для надежной фиксации штока 5 на нем выполнен буртик 18. Система управления схватом содержит генератор 19 импульсов, инвертирующий элемент 20, усилители 21 и 22, источник 23 напряжения и переключатель 24, в качестве которого может быть использован переключатель га- летного типа ЗПЗН.
Устройство работает следующим образом.
Робот опускает захватное устройство до касания пластинами 10 и 11 и роликами 3 плоской детали. При этом пальцы устрой- ства разведены в стороны тягами 14, положение которых определяется положением шарнира 16 на штоке 5, отведенного пружиной 6 в крайнее нижнее положение. При этом переключатель 24 находится в сред- нем положении, все электрические элементы устройства обесточены. Для захвата детали 25 переключатель 24 переводится в одно из двух крайних положений, соединяя при этом электроды 12с генератором 19 через усилитель 22, а электроды 13 с генератором 19 - через инвертор 20 импульсов и усилитель 21. В результате пьезокерами- ческие пластины 10 и 11 работают в проти- вофазе, т.е. когда пластина 10 сдвигает листовую деталь 25 к центру устройства, пластина 11 сжата, а в момент сжатия пластины 10 увеличивается пластина 11 и препятствует распрямлению детали 25, прижимая ее края.
Таким образом, деталь 25 под действием пальцев сгибается, принимая форму дуги окружности, по контуру которой располагаются ролики 3. Деформация детали происходит до фиксации штока 5 в крайнем верхнем положении защелкой 7. Затем переключатель 24 переводится в среднее положение, при этом электроды 12 и 13 обесточены. Тяги 14 удерживают пальцы от распрямления под действием сил упругости детали. Робот переносит деталь. Для освобождения детали, переключатель 24 переводится в другое крайнее положение, подключая обмотки 8 к источнику 23 напряжения. Шток 5 освобождается, возвращаясь под действием пружины 6 в исходное положение. Пальцы, разводимые в стороны тягами 14 и силами упругости листовой детали, распрямляются, освобождая деталь.
Предлагаемое устройство имеет расширенные технологические возможности, имеет простую конструкцию, может найти применение при транспортировании тонких листовых деталей в случае, когда применение вакуумных схватов затруднено.
Формула изобретения Захватное устройство, содержащее корпус, на котором шарнирно закреплены пальцы, выполненные в виде шарнирно соединенных звеньев, на которых установлены ролики, механизм поворота звеньев, о т- личающееся тем, что, с целью расширения технологических возможностей, механизм поворота звеньев выполнен в виде вибродвигателей, каждый из которых выполнен в виде пары пластин из пьезокера- мики, закрепленных концами на последнем звене соответствующего пальца, при этом в каждой паре пластин одна закреплена перпендикулярно продольной оси звена, а другая - под углом к ней, причем пластины соответствующим образом подключены к источнику напряжения, кроме того, на корпусе установлен с возможностью продольного перемещения подпружиненный относительно него шток, один конец которого шарнирно связан с пальцами, при этом на корпусе шарнирно установлены втулки, в которых с возможностью осевого перемещения установлены тяги, одни концы кото рых шарнирно связаны со штоком, а другие концы шарнирно связаны с последними звеньями соответствующих пальцев, причем на корпусе дополнительно закреплены фиксаторы положения штока.
Редактор М. Петрова
Фиг 3
Составитель С. Грибов Техред М.Моргентал
Корректор Л. Патай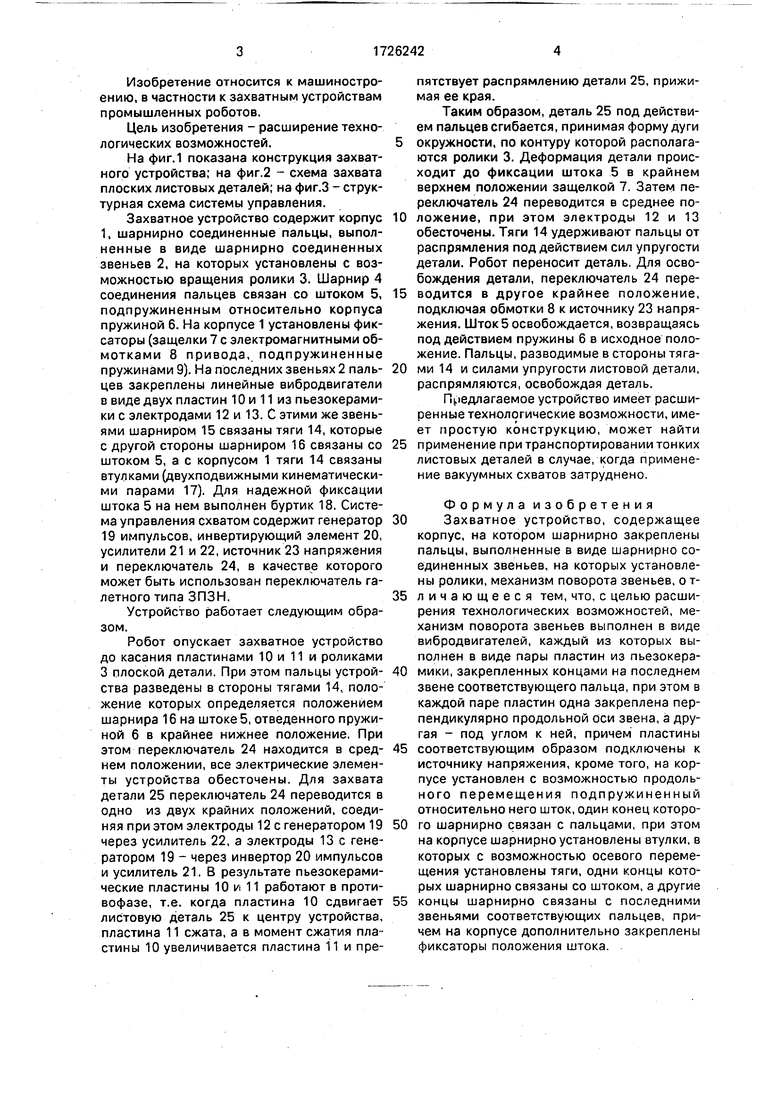
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1984 |
|
SU1191256A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Захватное устройство для отделения текстильных изделий от стопы | 1989 |
|
SU1719291A1 |
| Искусственная кисть | 1979 |
|
SU825063A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Искусственная кисть | 1979 |
|
SU854388A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Схват | 1982 |
|
SU1093543A1 |
Использование: для захвата тонких листовых деталей. Сущность изобретения: захватное устройство содержит шарнирно соединенные с подпружиненными относительно корпуса штока пальцы, выполненные в виде шарнирно соединенных звеньев 2 с роликами 3. Последние звенья пальцев снабжены линейными вибродвигателями, выполненными в виде пластин 10 и 11 из пьезокерамики. На корпусе установлены защелки 7, фиксирующие верхнее положение штока 5. Для захвата плоских деталей устройство перемещается с выпрямленными пальцами до касания вибродвигателями и роликами поверхности детали. При включении вибродвигателей смещаются края детали, изгибая ее поверхность, находящуюся под роликами пальцев, при этом звенья пальцев располагаются по контуру деформируемой поверхности детали. При достаточном д-ля удержания детали охвате ее пальцами шток фиксируется защелкой. 3 ил.
| Захватное устройство | 1985 |
|
SU1268404A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
