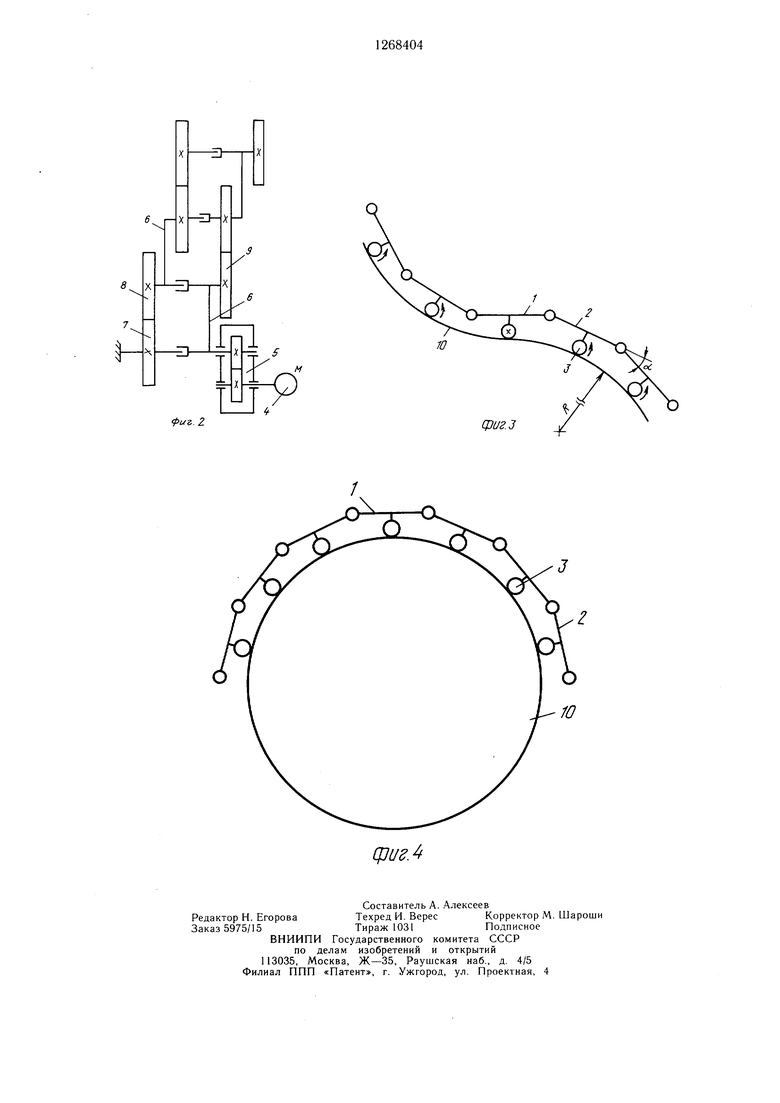
Изобретение относится к средствам оснащения промышленных роботов и манипуляторов, а именно к исполнительным орга нам, и может найти широкое применение во всех отраслях машиностроения для надежного закрепления при транспортировании объектов различной формы, а также при автоматизации технологических процессов сборки и сварки тел врашения. Целью изобретения является расширение технологических возможностей. На фиг. 1 схематично показан предлагаемый исполнительный орган, обший вид; на фиг. 2 - кинематическая схема механизма поворота (вариант); на фиг. 3 - схема работы исполнительного органа, при гибке ферромагнитного листового материала и при захвате изделий из немагнитного материала; на фиг. 4 - схема захвата ферромагнитных деталей. Захватное устройство содержит основание 1, к которому шарнирно крепятся пальцы, выполненные в виде шарнирно соединенных звеньев 2. На звеньях 2 установлены магнитные ролики 3 с дистанционным управлением. Звенья 2 снабжены механизмом поворота, состоящим из двигателя 4, который через редуктор 5 соединен с корпусом 6 звена 2, щарнирно закрепленного на основании 1. В корпусе 6 звена 2 расположено зубчатое колесо 7, закрепленное на основании 1 и входящее в зацепление с зубчатым колесом 8, соединенным с корпусом 6 последуюшего звена 2. Механизм поворота последующего звена 2 отличается тем, что зубчатое колесо 9 (соответствует зубчатому колесу 7, закрепленному на основании 1) неподвижно закреплено на корпусе 6 предыдущего звена 2. Один или несколько роликов 3 имеют индивидуальный привод (не показан), обеспечивающий вращение ролика 3 и его фиксацию. Захватное устройство работает следующим образом. Магнитные ролики 3 включены, пальцы находятся в исходном положении. Захватное устройство подводится к обрабатываемой заготовке 10 выпуклой или вогнутой формы до касания роликом 3, установленным на основании 1. Затем включается привод поворота звеньев, который поворачивает звено 2 на угол d. до касания роликом 3 поверхности обрабатываемой заготовки 10. При этом зубчатое колесо 8, взаимодействуя с колесом 7, закрепленным на основании 1, поворачивается на угол соотносительно корпуса б звена 2. Колесо 8 соединено с корпусом 6 последующего звена 2, следовательно, корпус 6 последующего звена 2 поворачивается на угол оС относительно предыдущего, и так далее, т.е. все звенья 2 располагаются по дуге окружности, повторяя контур обрабатываемой заготовки 10. При переносе плоских обрабатываемых заготовок 10 пальцы находятся в исходном положении. При необходимости гиба обрабатываемой заготовки 10 в обечайку включается привод поворота звеньев 2, которые, синхронно поворачиваясь на угол об, располагают ролики 3 по окружности, обеспечивая придание обрабатываемой заготовке 10 цилиндрической формы. При необходимости, включив привод вращения роликов 3, можно придать обечайке и любой цилиндрической детали вращательное движение. Выполнение конструкции предлагаемы.м образом обеспечивает расширение технологических возможностей захватного устройства. Формула изобретения Захватное устройство, содержащее щарнирно установленные на основании пальцы, каждый из которых выполнен в виде щарнирно соединенных звеньев, снабженных .механизмом их поворота на одинаковый угол относительно друг друга, отличающееся тем, что, с целью расширения технологических возможностей, на каждом звене установлены магнитные ролики, по меньшей мере один из которых снабжен приводом его вращения.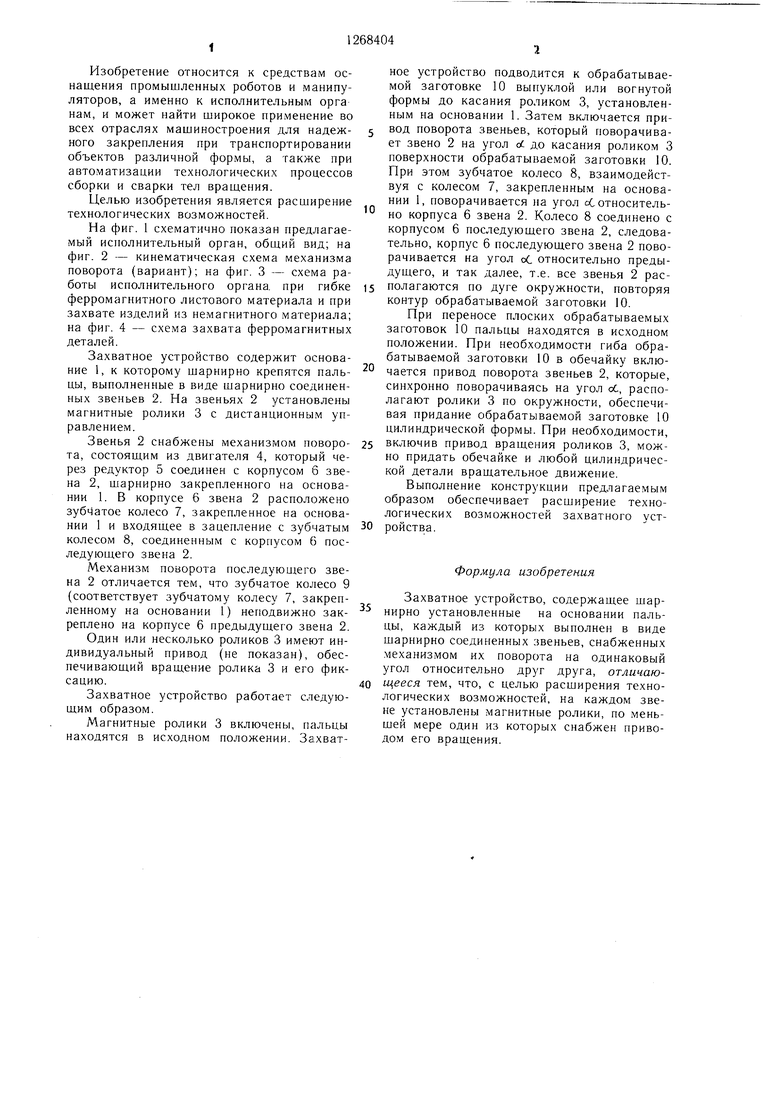
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления обечаек | 1985 |
|
SU1286315A1 |
| Манипулятор | 1986 |
|
SU1437213A1 |
| Роторная машина | 1988 |
|
SU1537474A1 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| Схват | 1983 |
|
SU1119842A1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов. Целью изобретения является расширение технологических возможностей. При включении привода поворота звеньев первое звено 2 поворачивается на заданный угол. При этом система передач поворачивает следуюш,ее звено на тот же угол относительно первого звена. Таким образом звенья располагаются по дуге окружности, повторяя контур обрабатываемой заготовки. Для придания враш,ения заготовке включают привод вращения магнитных роликов 3. 4 ил. О) to О5 00 
| Схват манипулятора | 1978 |
|
SU715319A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
