Изобретение относится к машиностроению, в частности к системам управления оборудованием для резки движущегося материала.
Цель изобретения - повышение точности позиционирования путем учета скорости перемещения заготовки.
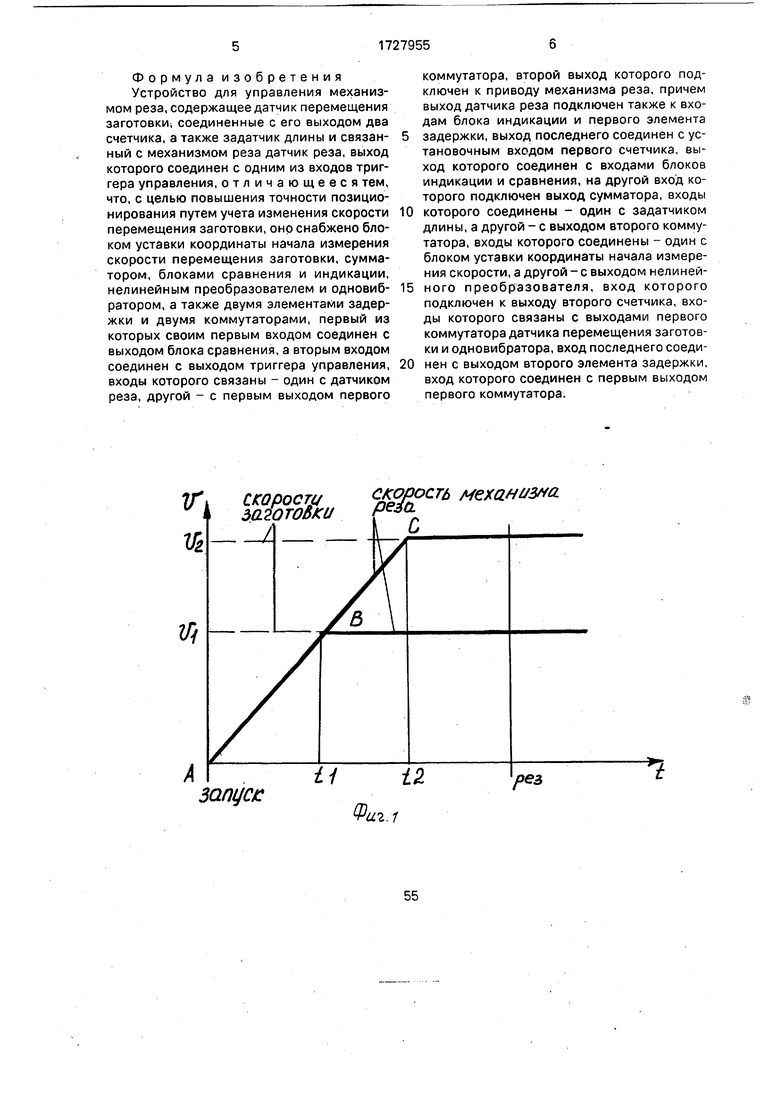
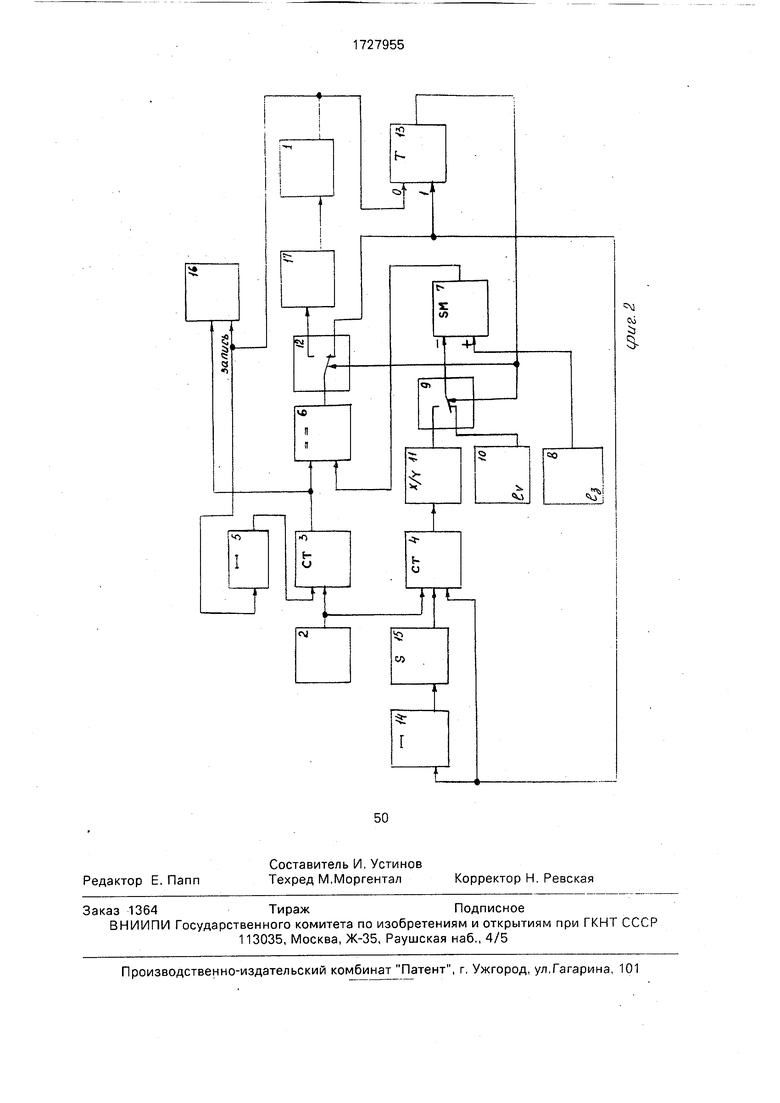
На фиг. 1 приведена временная диаграмма перемещения подаваемого материала и механизма реза: на фиг. 2 - блок-схема устройства.
Устройство содержит датчик 1 реза, датчик 2 перемещения заготовки, соединенные с его выходом первый счетчик 3 (длины) и второй счетчик 4 (скорости вращения). Датчик 1 реза через первый элемент 5 задержки соединен с установочным входом счетчика 3. Выход счетчика 3 подключен к одному из входов блока 6 сравнения, другой вход которого соединен с выходом сумматора 7. Вход сложения сумматора 7 соединен с задатчи- ком 8 длины, а вход вычитания - с выходом второго коммутатора 9. К первому входу
ч
к
ы
|Ю СЛ
ел
коммутатора 9 подключен блок 10 уставки координаты начала измерения скорости перемещения заготовки, а второй вход соединен через нелинейный преобразователь 11 с выходом счетчика 4. Соответствующий вход коммутатора 9 объединен с вторым входом первого коммутатора 12 и подключен к выходу триггера 13 управления. Первый вход коммутатора 12 соединен с выходом блока 6 сравнения. Первый выход коммутатора 12 подключен к входу установки единицы триггера 13, к одному из входов счетчика 4 и через последовательные элемент 14 задержки и одновибратор 15 к другому входу счетчика 4. Выход датчика 1 реза соединен с входом установки нуля триггера 13 и входом записи блока 16 индикации, второй вход которого соединен с выходом счетчика 3. Выходом устройства служит второй выход коммутатора 12, который соединен с приводом механизма 17 реза.
Сущность повышения точности отрезаемых заготовок заключается в том, что в отличие от известных устройств, коррекция подачи сигнала на включение механизма реза подается в процессе каждого рабочего хода.
Поскольку основной причиной отклонения длины отрезаемой заготовки от заданного значения является изменение скорости перемещения материала, сигнал включения механизма реза определяется скоростью перемещения (фиг, 1). Для реализации этого в устройстве предусмотрен канал непрерывного измерения скорости перемещения, преобразования его согласно уравнению равноускоренного движения механизма реза с учетом конкретной скорости перемещения и заданной длины отрезаемой заготовки.
Устройство работает следующим образом.
Предварительно экспериментальным путем определяют координату lv начала измерения скорости перемещения заготовки из условия завершения процесса измерения этого параметра при максимально возможной скорости этого перемещения до выдачи сигнала на рез.
Определяют (на реальном агрегате без заготовки) характеристики нелинейного преобразователя, устанавливающие зависимость упреждения от скорости перемещения заготовки, путем снятия диаграмм разгона механизма реза до разных скоростей.
Программируют соответствующим образом нелинейный преобразователь 11 и
вводят задание lv в блок 10 уставки координаты начала измерения скорости перемещения заготовки.
При срабатывании механизма реза сиг- налом с датчика 1 триггера 13 управления устанавливается в нулевое положение, при котором коммутаторы 9 и 12 установятся в положение 1. В этом положении коммутатор 9 пропустит на вход Вычитание сумма0 тора 7 число импульсов, соответствующее координате lv, с выхода блока 10 уставки. На входе Сложение сумматора 7 посредством задатчика 8 записано число импульсов, соответствующее мерной длине U. Разность
5 (U-lv) поступает на вход блока 6 сравнения, на второй вход которого поступает текущая длина заготовки, измеряемая с помощью счетчика 3, на вход которого подаются импульсы с датчика 2 перемещения заготовки.
0 После того, как в счетчике 3 наберется количество импульсов, равное (3-lv), блок 6 через коммутатор 12 переключает триггер 13 в состояние 1, устанавливает счетчик 4 в исходное состояние и через элемент 14 за5 держки запускает одновибратор 15. Сигнал с выхода одновибратора 15, калиброванный по времени, разрешает подсчет им- пульсов перемещения заготовки счетчиком 4. По окончании импульса одновибратора 15
0 в счетчике 4 будет значение, пропорциональное скорости заготовки. Это значение, преобразованное посредством нелинейного преобразователя 11, дает величину путевого упреждения для выдачи команды на
5 механизм реза. Коммутаторы 9 и 12 переключаются триггером 13 в состояние 2. Через коммутатор 9 величина путевого упреждения поступает на вход Вычитание сумматора 7, где вычитается из сигнала 3.
0 Разность поступает в блок 6 сравнения, который по ее совпадению с результатом подсчета счетчиком 3 импульсов перемещения заготовки подает сигнал управления на механизм 17 реза (через коммутатор 12).
5
В момент реза срабатывает датчик 1 реза, который разрешает запись информации, накопленной в счетчике 3 длины (отр), в блок 16 индикации. Этим же сигналом
0 через элемент 5 задержки датчик 1 устанавливает счетчик 3 в исходное состояние, а триггер 13 переводит в состояние О. Далее цикл повторяется.
Таким образом, устройство благодаря
5 учету изменений скорости перемещения заготовки в каждом текущем цикле, обеспечивает более точное позиционирование и тем самым снижает выход некондиционных (по длине) изделий. Этим обуславливается эффективность использования устройства,
Формула изобретения Устройство для управления механизмом реза, содержащее датчик перемещения заготовки, соединенные с его выходом два счетчика, а также задатчик длины и связанный с механизмом реза датчик реза, выход которого соединен с одним из входов триггера управления, отличающееся тем, что, с целью повышения точности позиционирования путем учета изменения скорости перемещения заготовки, оно снабжено блоком уставки координаты начала измерения скорости перемещения заготовки, сумматором, блоками сравнения и индикации, нелинейным преобразователем и одновиб- ратором, а также двумя элементами задержки и двумя коммутаторами, первый из которых своим первым входом соединен с выходом блока сравнения, а вторым входом соединен с выходом триггера управления, входы которого связаны - один с датчиком реза, другой - с первым выходом первого
коммутатора, второй выход которого подключен к приводу механизма реза, причем выход датчика реза подключен также к входам блока индикации и первого элемента
задержки, выход последнего соединен с установочным входом первого счетчика, выход которого соединен с входами блоков индикации и сравнения, на другой вход которого подключен выход сумматора, входы
которого соединены - один с задатчиком длины, а другой - с выходом второго коммутатора, входы которого соединены - один с блоком уставки координаты начала измерения скорости, а другой - с выходом нелинейного преобразователя, вход которого подключен к выходу второго счетчика, входы которого связаны с выходами первого коммутатора датчика перемещения заготовки и одновибратора, вход последнего соединен с выходом второго элемента задержки, вход которого соединен с первым выходом первого коммутатора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления безупорным остановом полосы металла | 1974 |
|
SU533411A1 |
| Устройство управления пневмоприводом рычажного механизма пропуска реза | 1989 |
|
SU1687383A1 |
| Устройство управления пневмоприводом рычажного механизма пропуска реза | 1989 |
|
SU1655668A1 |
| Устройство для определения режимов резьбошлифования | 1986 |
|
SU1386960A2 |
| Система для автоматической отбраковки труб | 1983 |
|
SU1101308A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1982 |
|
SU1092015A1 |
| Способ остановки проката на заданной координате при порезке на мерные длины и устройство для его осуществления | 1987 |
|
SU1523268A1 |
| Устройство для раскроя на ходу холодногнутого профиля | 1987 |
|
SU1484411A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Уровнемер | 1990 |
|
SU1737276A1 |
Изобретение относится к области машиностроения, в частности к системам управления оборудованием для резки движущегося материала. Целью изобретения является повышение точности позиционирования путем учета скорости перемещения заготовки. Эта цель достигается путем непрерывного контроля скорости движущегося материала и введения коррекции в сигнал включения механизма реза. Этот сигнал создается в нелинейном преобразователе согласно уравнению равноускоренного движения с учетом текущего значения скорости перемещения и заданной длины отрезаемой заготовки. Для этого используются соединенные последовательно импульсный датчик перемещения материала, счетчик скорости и нелинейный преобразователь, на выходе которого формируется сигнал путевого упреждения для подачи сигнала на включение механизма реза. При этом в устройстве предусмотрены также блок уставки координаты начала измерения скорости, блок задания длины отрезаемой заготовки, сумматор и блок сравнения, выход которого через коммутатор подключен к приводу механизма реза. В устройстве предусмотрен также блок индикации фактической длины отрезаемой заготовки. Введение непрерывной коррекции в процессе каждого хода повышает точность по длине каждой заготовки, что обуславливает эффективность использования устройства. 2 ил. ляяеп Тсэшв
Скорости 5Q.20TOBKU
-А
запуск
И
СКОРОСТЬ механизма рези.
С
U
рез,
Ч
Ф
игл
| Устройство управления механизмом резапРАВильНО-ОТРЕзНОгО ABTOMATA | 1978 |
|
SU841809A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
