Изобретение относится к устройствам для манипулирования с помощью толкателей обрабатываемыми изделиями, конструктивно сопряженным со станками и установленным в поточной линии, конкретнее к загрузочно-ориентирующим устройствам для подачи цилиндрических предметов, в частности к транспортным роторам автоматических роторных линий,
Цель изобретения - повышение надежности работы устройств за счет обеспечения поджима деталей к направляющему желобу.
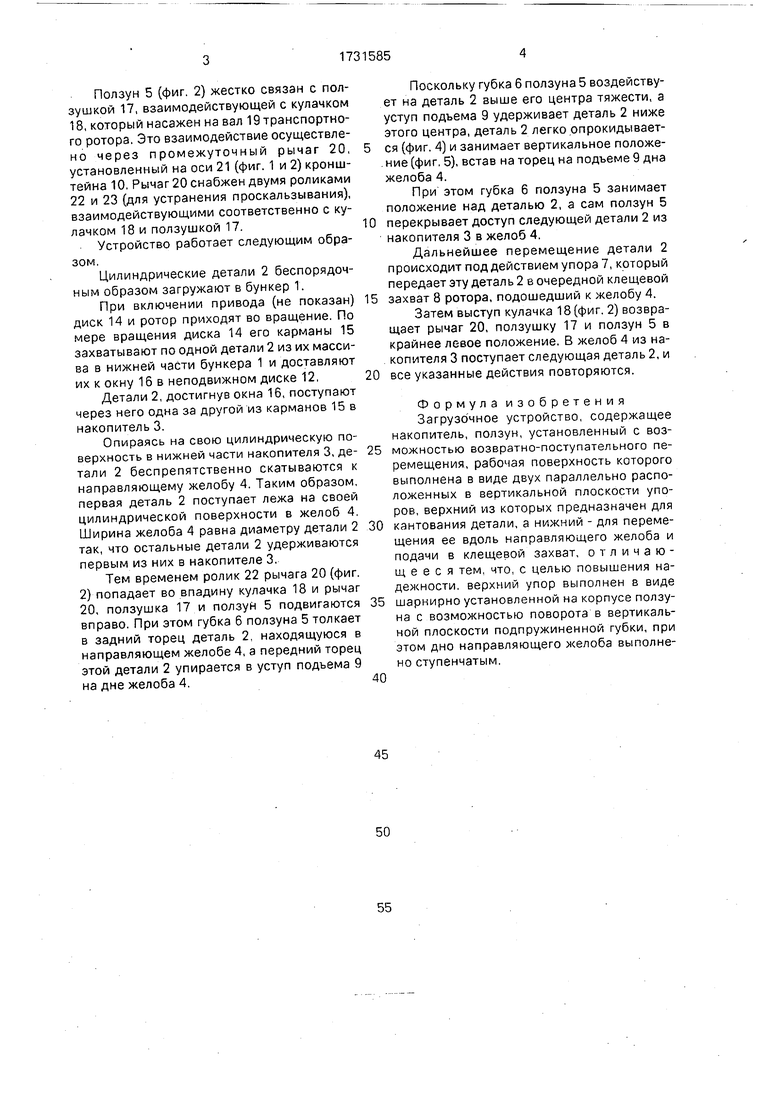
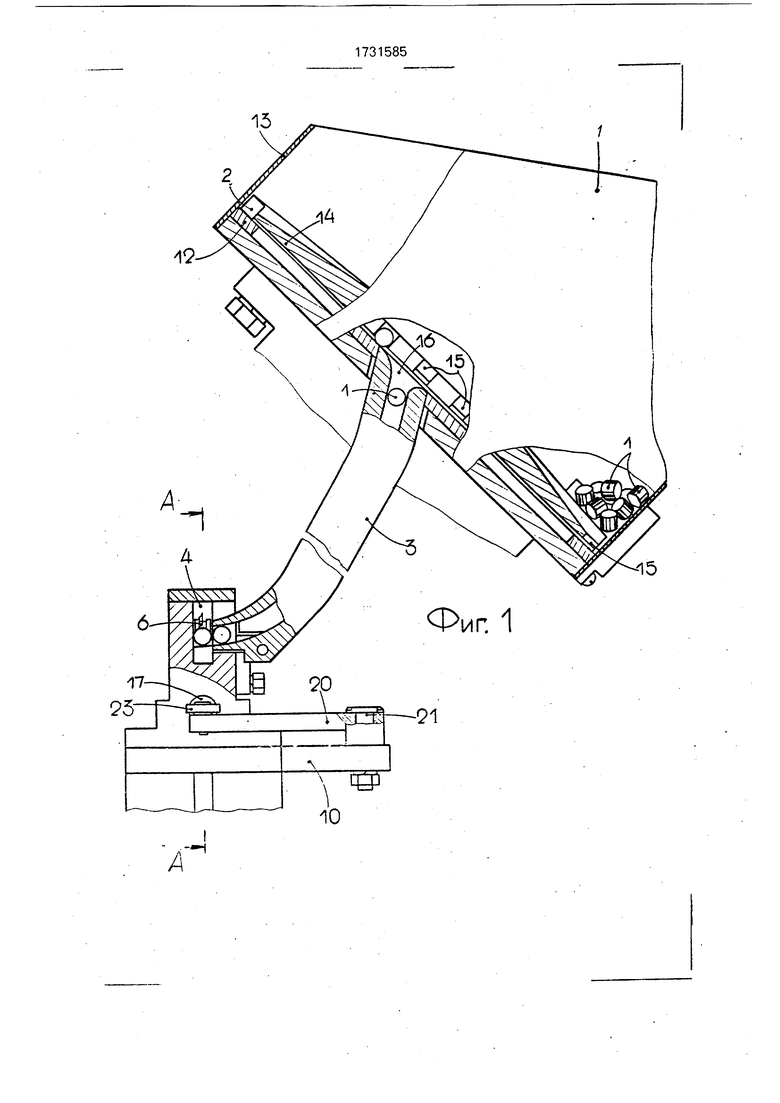
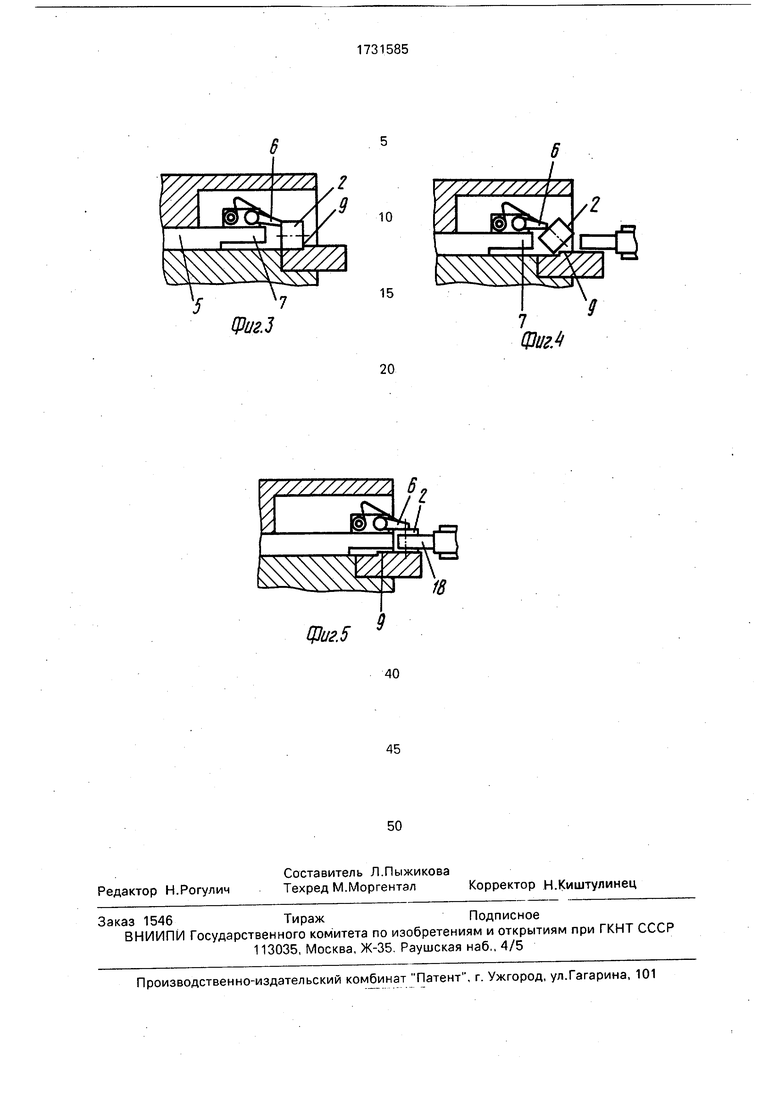
На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3-5 - положения детали в процессе транспортировки.
Загрузочное устройство содержит бункер 1 для хаотического массива деталей 2. Под бункером 1 установлен накопитель 3 и сообщающийся с накопителем 3 перпендикулярный ему направляющий желоб 4. в котором размещен с возможностью возвратно-поступательного перемещения ползун 5.
Накопитель 3 выполнен в виде лотка- ската. На ползуне 5 (фиг. 2) сверху установлена выступающая вперед подпружиненная губка 6, предназначенная для кантования детали, и упор 7 - для перемещения детали в кольцевой захват 8. На дне желоба 4 сразу за накопителем 3 имеется ступенчатый подъем 9. Высота подъема 9 минимальна, но достаточна для того, чтобы создать препятствие для продвижения детали 2, высота которых несколько меньше их диаметра. Устройство установлено на кронштейне 10, который закреплен на неподвижном корпусе 11 транспортного ротора.
Бункер 1 (фиг. 1) выполнен в виде кар- манчикового бункера и содержит неподвижный диск 12, кожух 13чи вращающийся диск 14 с карманами 15 по периферии для захвата деталей 2. В неподвижном диске 12 выполнено окно 16, к которому подведен накопитель 3. Карманы 15 и окно 16 выполнены ориентирующими детали 2 так, чтобы они поступали в накопитель 3 в горизонтальном положении.
сл
с
х| GO
СЛ 00 СЛ
Ползун 5 (фиг. 2) жестко связан с пол- зушкой 17, взаимодействующей с кулачком 18, который насажен на вал 19 транспортного ротора. Это взаимодействие осуществлено через промежуточный рычаг 20, установленный на оси 21 (фиг. 1 и 2) кронштейна 10, Рычаг 20 снабжен двумя роликами 22 и 23 (для устранения проскальзывания), взаимодействующими соответственно с кулачком 18 и ползушкой 17.
Устройство работает следующим образом
Цилиндрические детали 2 беспорядочным образом загружают в бункер 1.
При включении привода (не показан) диск 14 и ротор приходят во вращение. По мере вращения диска 14 его карманы 15 захватывают по одной детали 2 из их массива в нижней части бункера 1 и доставляют их к окну 16 в неподвижном диске 12,
Детали 2, достигнув окна 16, поступают через него одна за другой из карманов 15 в накопитель 3.
Опираясь на свою цилиндрическую поверхность в нижней части накопителя 3, де- тали 2 беспрепятственно скатываются к направляющему желобу 4. Таким образом, первая деталь 2 поступает лежа на своей цилиндрической поверхности в желоб 4 Ширина желоба 4 равна диаметру детали 2 так, что остальные детали 2 удерживаются первым из них в накопителе 3.
Тем временем ролик 22 рычага 20 (фиг. 2) попадает во впадину кулачка 18 и рычаг 20, ползушка 17 и ползун 5 подвигаются вправо. При этом губка 6 ползуна 5 толкает в задний торец деталь 2 находящуюся в направляющем желобе 4, а передний торец этой детали 2 упирается в уступ подъема 9 на дне желоба 4.
Поскольку губка 6 ползуна 5 воздействует на деталь 2 выше его центра тяжести, а уступ подьема 9 удерживает деталь 2 ниже этого центра, деталь 2 легко опрокидывается (фиг. 4) и занимает вертикальное положение (фиг, 5), встав на торец на подъеме 9 дна желоба 4.
При этом губка 6 ползуна 5 занимает положение над деталью 2, а сам ползун 5 перекрывает доступ следующей детали 2 из накопителя 3 в желоб 4.
Дальнейшее перемещение детали 2 происходит под действием упора 7, который передает эту деталь 2 в очередной клещевой захват 8 ротора, подошедший к желобу 4.
Затем выступ кулачка 18 (фиг. 2) возвращает рычаг 20, ползушку 17 и ползун 5 в крайнее левое положение, В желоб 4 из накопителя 3 поступает следующая деталь 2, и все указанные действия повторяются.
Формула изобретения Загрузочное устройство, содержащее накопитель, ползун, установленный с возможностью возвратно-поступательного перемещения, рабочая поверхность которого выполнена в виде двух параллельно расположенных в вертикальной плоскости упоров, верхний из которых предназначен для кантования детали, а нижний - для перемещения ее вдоль направляющего желоба и подачи в клещевой захват, отличающееся тем что, с целью повышения надежности, верхний упор выполнен в виде шарнирно установленной на корпусе ползуна с возможностью поворота в вертикальной плоскости подпружиненной губки, при этом дно направляющего желоба выполнено ступенчатым.
19.
-15
X
i
C
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1990 |
|
SU1796408A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Загрузочный ротор | 1989 |
|
SU1646783A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Роторная линия | 1989 |
|
SU1710302A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| МНОГОПОТОЧНАЯ РОТОРЛАЯ МАШИНА | 1971 |
|
SU310713A1 |
| Способ обкатки беговой дорожки оси велопедали и роторно-конвейерная линия для его осуществления | 1990 |
|
SU1781016A1 |
| Инструментальный блок к устройству для отрезки деталей | 1972 |
|
SU441752A1 |
Использование: для обеспечения кантования детали и подачи ее в клещевой захват ротора. Сущность изобретения: в устройстве, содержащем накопитель и ползун, установленный с возможностью перемещения, рабочая поверхность ползуна выполнена в виде двух упоров, верхний из которых выполнен в виде подпружиненной губки и предназначен для кантования детали в процессе перемещения ее вдоль направляющего желоба, поверхность которого выполнена ступенчатой, а другой - для дальнейшего перемещения детали в захват. 5 ил.
Щи2.5
1В
| 0 |
|
SU189360A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
