Изобретение относится к сельскому хозяйству, в частности к устройствам для фик- сации животных, а именно крупного рогатого скота.
В процессе содержания крупного рогатого скота предусматривается ряд операций, требующих тесного контакта между обслуживающим персоналом и животным, например лечение животных, обрезка копыт и т.д. Незафиксированные животные могут наносить травмы себе и обслуживающему персоналу.
Известен фиксатор для конечностей животного, содержащий дугу со сцепным узлом захвата конечности, соединенным с тросами и лебедкой.
Однако этот фиксатор не исключает близкого контакта человека с животным в момент постановки узла захвата на конечность.
Известен фиксатор для захвата ноги животного, содержащий неподвижную и подвижную лапки, закрепленные на держателе, и механизм размыкания лапок.
Недостаток указанного фиксатора состоит в том, что держатель, оставаясь на узле захвата в рабочем положении, является травмоопасным и создает неудобства при выполнении других работ.
Наиболее близким к изобретению является устройство выполненное в виде С- образного захвата, в гнездо которого вставлен винт с хомутом. Захват зацепляется с передней стороны задней конечности. При вращении винта хомут упирается в сухожилие конечности, при этом конечность поднимается и животное обездвиживается.
Недостатком такого устройства является необходимость близкого контакта человека с животным в период постановки захвата на конечность, а также при снятии захвата с конечности.
Ё
ч СО 4
J
ГО
ы
Целью изобретения является повышение безопасности и удобства операторов при работе с фиксатором.
Это достигается тем, что фиксатор снабжен механизмом дистанционного удержания его на конечности животного.
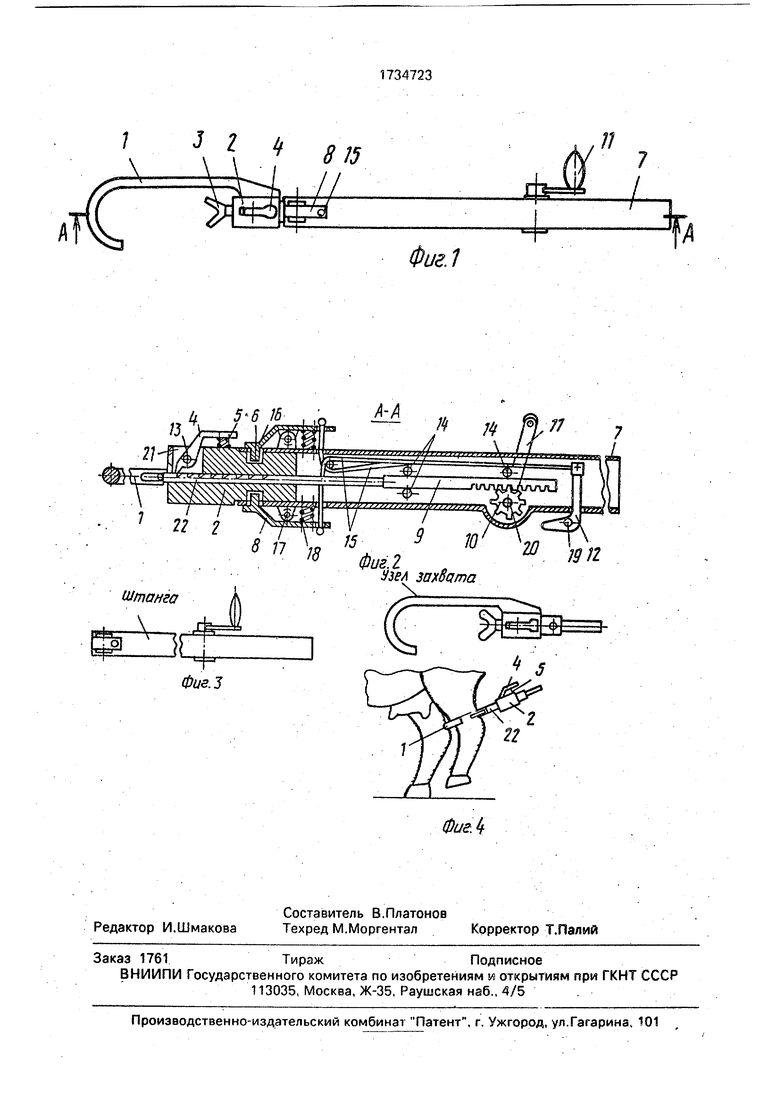
На фиг.1 изображен фиксатор, общий вид; на фиг.2 - разрез А-А на фиг.; на фиг.З - фиксатор в рассоединенном положении; на фиг.4 - узел, включающий С-образный захват, втулку с проточиной, стопор, V-образ- ный упор и толкатель.
Фиксатор содержит С-образный захват 1, V-образный упор 3, привод V-образного упора и механизм дистанционного удержания С-образиого захвата.
Привод V-образного упора 3 состоит из зубчато-реечной передачи и механизма перемещения V-образного упора. Зубчато-реечная передача, размещенная внутри штанги 7, включает рейку 9, шестерню 10, ось 20 шестерни, рукоятку 11, находящуюся на одной оси 20 с шестерней, и направляющие 14. Мехнизм перемещения упора содержит втулку 2, имеющую проточину 21 и два отверстия 6, толкатель 22 с насечками, стопор 4, пружину 5 стопора и ось 13 стопора.
Механизм дистанционного удержания С-образного захвата 1 включает штангу 7, рычаг 12, ось 19 рычага, стопоры 8 с наконечниками 16, оси 17 стопоров, пружины 18 и тросы 15,
Фиксатор работает следующим образом.
Передний конец штанги 7 по принципу вал - втулка надевается на конец втулки 2, при этом наконечники 16 стопоров 8 входят в отверстия б втулки и соединяют штангу 7 и втулку 2.
Перед наложением фиксатора на заднюю конечность животного оператор, вращая рукоятку 11 против часовой стрелки, отводит рейку 9 в крайнее положение (заднее), а затем, сжав пружину 5 и выведя стопор 4 из зацепления с насечками толкателя 22, рукой отводит в крайнее заднее (исходное) положение V-образный упор 3, Затем С-образный захват 1 накладывают на переднюю часть голени задней конечности животного выше скакательного сустава и, вращая рукоятку 11 по часовой стрелке, приводят во вращение шестерню 10, перемещая рейку 9 вперед, которая торцом упирается а торец толкателя 22, перемещая его вместе с V-образным упором 3, жестко соединенным с толкателем 22, вперед, сдавливая ахиллово сухожилие животного (фиг.4) и вызывая болевое ощущение у животного, в результате чего оно поднимает фиксируемую конечность и обездвиживается. После этого оператор нажимает на рычаг 12, который, поворачиваясь на оси 19, натягивает тросы 15, воздействующие в свою очередь на стопоры 8, и, поворачивая их на осях 17,
сжимает пружины 18, выводя наконечники 16 стопоров 8 из отверстий 6 в гулки 2, рассоединяя тем самым С-образный захват 1 и штангу7 при любом промежуточном положении V-образного упора 3, От самопроизвольной расфиксации конечности животного толкатель V-образного упора 3 удерживается стопором 4, который находится з постоянном зацеплении с насечками толкателя 22 V-образного упора 3.
Для снятия С-образного захвата 1 с конечности животного оператор нажимает рукой на стопор 4, поворачивая его на оси 13 и выводя тем самым стопор 4 из зацепления с насечками толкателя 22 V-образного упора
3, продвигая втулку по толкателю V-образного упора 3 к конечности животного, снимает С-образный захват,
30
Формула изобретения
Фиксатор Для конечности животного, включающий С-образный захват, внутри которого, на нерабочей ветви, с возможностью возвратно-поступательного перемещения вдоль него установлен V-образный упор, механизм перемещения V-образного упора и привод, отличающий ся тем, чго, с целью повышения безопасности и удобства в пользовании, фиксатор снабжен
механизмом дистанционного удержания его на конечности животного, выполненным в виде полой штанги, внутри которой расположено приспособление для отсоединения ее от С-образного захвата, при этом привод
механизма перемещения V-образного упора выполнен в виде зубчато-реечной передачи, расположенной в полости штанги, а механизм перемещения V-образного упора выполнен в виде соосной со штангой втулки
с проточкой, один конец которой закреплен на нерабочей ветви С-образного захвата, а другой связан со штангой, коаксиально установленного во втулке толкателя с насечками, жестко закрепленного на V-образном упоре, и стопора, расположенного в проточке втулки.
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для упаковки предметов | 1979 |
|
SU863461A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| Установка для обработки поверхностей облицовочных плит | 1973 |
|
SU482317A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Автоматическая линия для формования и вулканизации покрышек | 1973 |
|
SU430605A1 |
| Устройство для транспортировки за-гОТОВОК | 1978 |
|
SU812391A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НАТЯЖЕНИЯ ПРИ ПРЕССОВАНИИ МЕТАЛЛОВ | 2005 |
|
RU2278758C1 |
Изобретение может быть использовано в ветеринарии. Сущность изобретения: устройство имеет штангу, внутри которой расположен реечный приводной механизм, корпус, С-образный захват, жестко соединенный с корпусом, и V-образный упор, пе-- ремещающийся в корпусе. Корпус захвата и штанга соединены по схеме вал - втулка. На одном конце штанги установлены подпружиненные стопоры, входящие в отверстия, соответствующие им по форме, а другим концом стопоры соединены тросом с рычагом, установленным на другом конце штанги. 4 ил. .
-л. 1
-ф- /
я 15 Ю
1В Фиг.2 е
Узел захвата
да
Фие.З
«
/ R//7
/ .,/f/
f f77 - 3 } frr r rr ZZB04ral
-л. 1
-ф- /
Ю
(
да V/,
| Патент США № 3769940, кл | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
