Изобретение относится к средствам грузоперерэботки и может быть использовано в различных отраслях народного хозяйства для разгрузки бочек и барабанов,
Цель изобретения - повышение надежности путем упрощения конструкции.
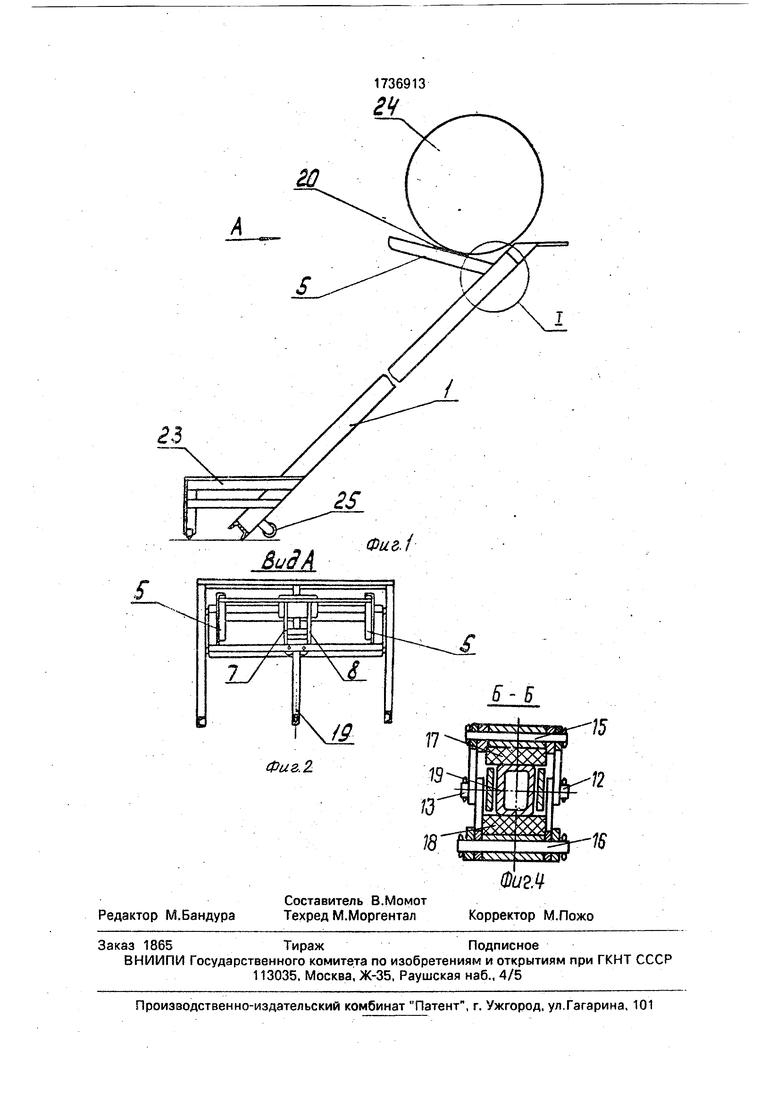
На фиг. 1 показано устройство для разгрузки штучных грузов, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3.
Устройство для разгрузки штучных грузов содержит раму 1 с направляющими 2, каретку 3 с возможностью перемещения на четырех роликах 4 по направляющим 2, На каретке 3 закреплена грузовая площадка 5 и шарнирно закреплены на осях 6 двуплечие рычаги 7, 8, короткие плечи которых образуют с шарнирно соединенными стержнями 9, 10 и 11 четырехзвенные механизмы, оси 12 и 13 которых размещены в пазах 14 рамы каретки 3. Концы стержней 10 и 11 обоих четырехззенников соединены общей осью 15, а короткие концы рычагов 7, 8 и концы стержней 9 этих механизмов соеди- нень бщей осью 16. На осях 16 и 15 закреплены тормозные колодки 17 и 18, взаимодействующие с двух сторон с трубчатым прямоугольным стержнем 19, который закреплен на раме 1 параллельно направляющим 2. На других концах рычагов 7 и 8 закреплены одним концом опорные пластины 20, взаимодействующие другими концами с регулировочными винтами 21, установленными на рычагах 7 и 8.
На каретке 3 установлены также четыре ограничительных ролика 22, которые взаимодействуют с боковыми поверхностями стержня 19.
На одном из концов стержня рамы 1 жестко закреплена приемная площадка 23 для груза 24 и установлены ходовые ролики 25.
Устройство работает следующим образом.
Для разгрузки, например, бочек 24 с транспортного средства устройство на ходовых роликах 25 перемещается к нему и устанавливается в исходном положении под углом к горизонтали. Каретка 3 с грузовой площадкой 5 вручную перемещается по направляющим 2 в верхнее положение до уровня грузовой платформы транспортного средства, На площадку 5 накатывается бочка 24. При этом она, опираясь на пластины 20, через них воздействует на рычаги 7 и 8, Оси 12 и 13 четырехзвенных механизмов начинают смещаться в пазах 14 каретки-3, а оси 15 и 16 с тормозными колодками 17 и 18 сближаются. Колодки 17 и 18 прижимаются
к стержню 19 и притормаживают опускающуюся вниз в это время каретку 3 с бочкой 24. В результате бочка 24 под воздействием собственной силы тяжести
плавно перемещается на приемную площадку 23.
Как только бочка коснется поверхности площадки 23, движение каретки 3 прекратится, при этом концы наклонных пластин
20, несколько выступающие за пределы поверхности площадки 23, будут препятства- вать скатыванию бочки 24 с нее.
Для освобождения бочки 24 необходимо с приложением незначительного усилия
несколько отклонить ее в сторону рамы 1, при этом концы рычагов 7, 8 освободятся и прижим тормозных колодок 17, 18 к стержню прекратится. Каретка под действием собственной силы тяжести скатится вниз до
упора на раму 1.
Далее бочка 24 перекатывается на любое другое транспортное средство, например рольганг, и перемещается на заданную позицию. Каретка 3 вручную снова поднимается вверх и процесс разгрузки повторится.
Предлагаемое устройство конструктивно несложно, удобно в эксплуатации и требует минимума затрат физических усилий обслуживающего персонала. По сравнению
с известными устройствами разгрузка грузов с использованием предлагаемого устройства осуществляется быстрее. Формула изобретения Устройство для выгрузки штучных грузов, преимущественно бочек, содержащее наклонную раму с направляющими, смонтированную на последних с возможностью перемещения каретку с грузовой площадкой и установленный на каретке с возможностью
взаимодействия с направляющими тормозной механизм,отличающееся тем,что, с целью повышения надежности и упрощения конструкции, грузовая площадка выполнена из пары двуплечих рычагов, каждый из
которых закреплен шарниром на каретке с возможностью поворота в вертикальной продольной плоскости, каретка выполнена с продольными пазами, а тормозной механизм включает в себя пару шарнирных четырехзвенников, каждый из которых образован тремя стержнями и коротким плечом указанного рычага, причем шарнир, расположенный в каждом четырехзвеннике напротив указа- ного, размещен в пазу каретки с возможностью перемещения, а к двум другим шарнирам прикреплены с возможностью взаимодействия с противоположными поверхностями направляющих тормозные колодки.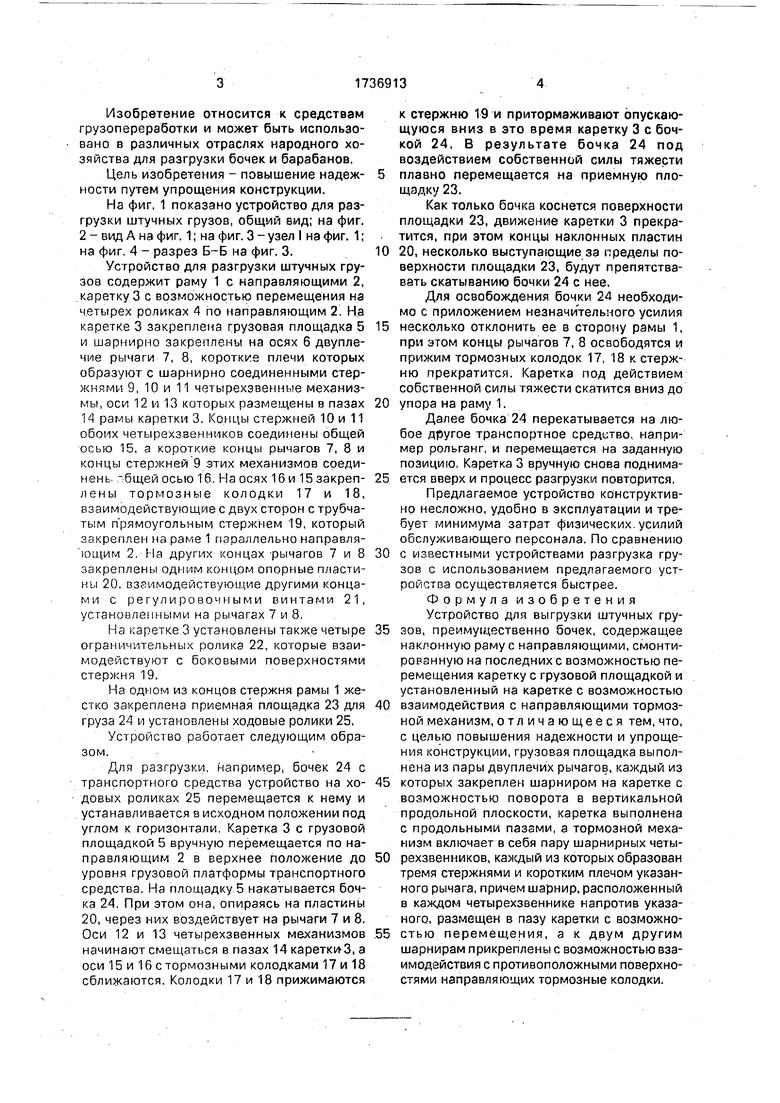
| название | год | авторы | номер документа |
|---|---|---|---|
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| Захват для бочек к погрузчику | 1987 |
|
SU1458311A1 |
| ТРЕХКОЛЕСНЫЙ ВЕЛОСИПЕД ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ | 1995 |
|
RU2087367C1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Грузозахватное устройство | 1990 |
|
SU1794847A1 |
| Тормоз колесной тележки | 1988 |
|
SU1643287A1 |
| Канатный строительный подъемник для длинномерных грузов | 1981 |
|
SU1002222A1 |
Использование: относится к средствам грузопереработки и может быть использовано в различных отраслях народного хозяйства. Сущность: устройство содержит наклонную раму с направляющими 2 и каретку 3, которая снабжена грузовой площадкой 5 и двумя рычагами, шарнирно связанными с кареткой. Короткие плечи рычагов и шарнирные оси их связаны с тремя шарнирно соединенными стержнями 9-11 с образованием четырехзвенных механизмов. Концы стержней четырехзвенников, не связанные с кареткой 3, соединены общими осями, на которых закреплены тормозные колодки, взаимодействующие с прямоугольным стержнем, закрепленным на раме. 4 ил. Р ю l 4л С vi со о о cS 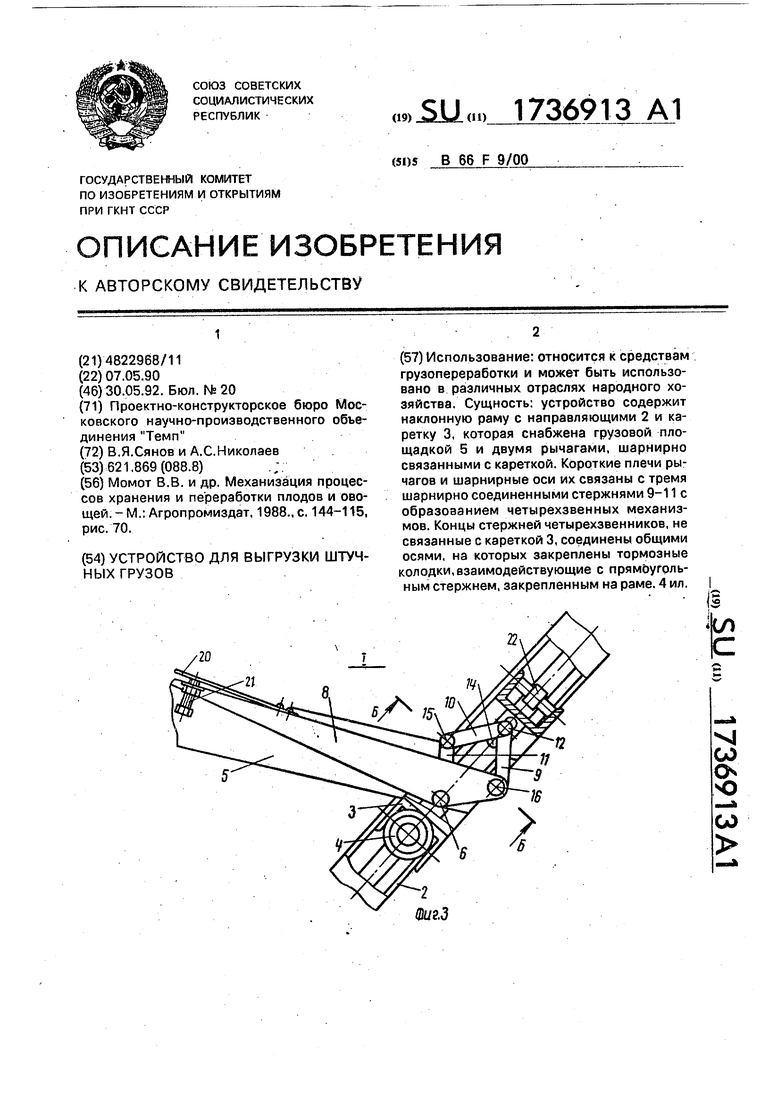
Фиг.2.
Б-В
| Момот В.В | |||
| и др | |||
| Механизация процессов хранения и переработки плодов и овощей | |||
| -М.: Агропромиздат, 1988., с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
