Изобретение относится к станкостроению, а именно к устройствам автоматической загрузки технологического оборудования стержневыми деталями.
Целью изобретения является повышение надежности работы загрузочного устройства путем исключения возможности защемления детали, проходящей через выходное отверстие воронки, соседними деталями посредством сообщения ей радиальных колебаний
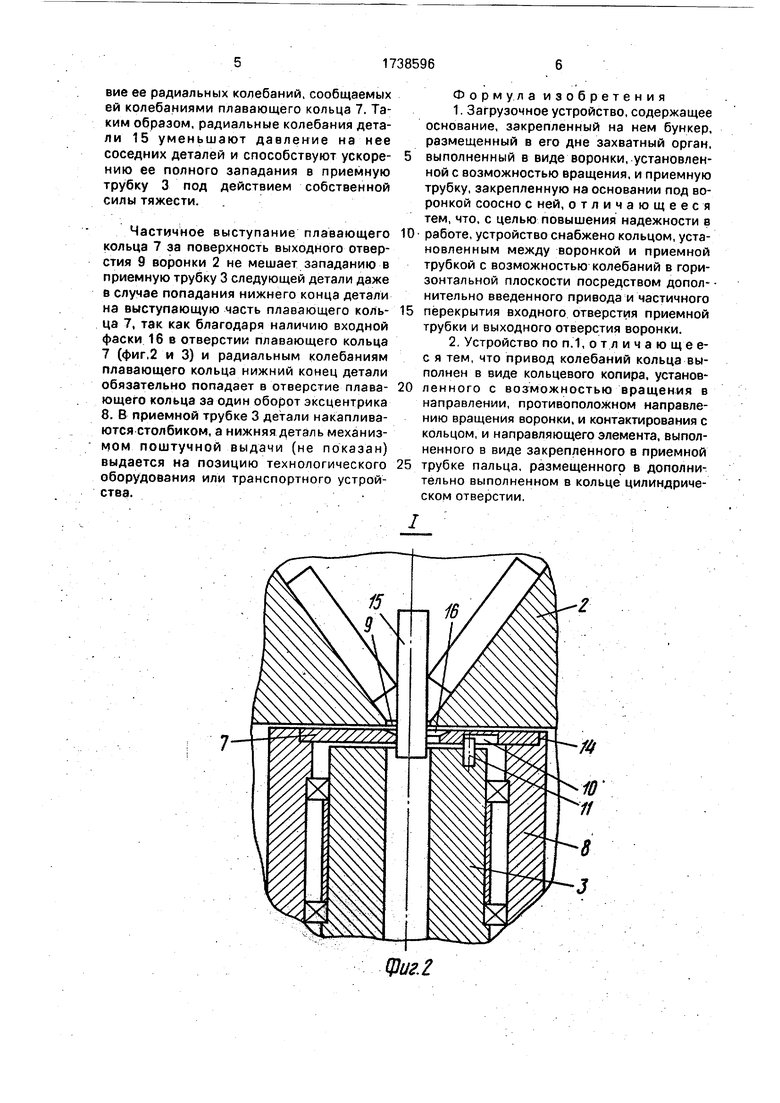
На фиг.1 изображено загрузочное устройство, продольный разрез; на фиг.2 -узел I на фиг.1; на фиг.3-то же, в противоположном положении плавающего кольца.
Загрузочное устройство содержит бункер 1. в дне которого установлена с возможностью вращения захватная воронка 2. Под воронкой 2 установлена приемная трубка 3, неподвижно закрепленная на бункере 1. На воронке 2 жестко закреплено червячное колесо 4, входящее в зацепление с червяком 5 редуктора 6, закрепленного на бункере 1.
Между воронкой 2 и приемной трубкой 3 установлено плавающее кольцо 7 с возможностью радиальных колебаний относительно них и частичного выступания за их внутреннюю поверхность.
Диаметры отверстий воронки 2, плавающего кольца 7 и приемной трубки 3 выбираются меньше двух диаметров детали, чтобы исключить возможность западания в них двух деталей параллельно друг другу.
Привод радиальных колебаний плавающего кольца 7 может быть выполнен в виде эксцентрика 8, установленного между воронкой 2 и плавающим кольцом 7 с возможностью контактирования с последним и вращения относительно него в направлении, противоположном направлению вращения воронки 2. Противоположность направлений вращения эксцентрика 8 и воронки 2 обеспечивает частичное выступание плавающего кольца 7 за поверхность выходного отверстия 9 воронки не в одном
и том же месте, а поочередно по всей его окружности за один оборот эксцентрика 8. Для обеспечения возможности радиальных смещений плавающего кольца 7 в нем выполнено цилиндрическое отверстие 10, в котором с зазором установлен палец 11, жестко закрепленный в приемной трубке 3. Эксцентрик 8 кинематически связан с воронкой 2 через паразитное зубчатое колесо
12, установленное с возможностью свободного вращения на неподвижной оси 13
Загрузочное устройство работает следующим образом.
От электродвигателя (не показан) через
червяк 5 и червячное колесо 4 редуктора 6 приводится во вращение захватная воронка 2, а от нее - входящее с ней в зацепление паразитное зубчатое колесо 12, заставляющее вращаться эксцентрик 8 в направлении,
противоположном направлению вращения воронки 2. Вращающийся эксцентрик 8 своей эксцентричной внутренней поверхностью 14 заставляет смещаться плавающее кольцо 7 в радиальном направлении, обеспечивая его радиальное колебания и в процессе их - частичное его выступание за поверхность выходного отверстия 9 воронки 2 поочередно по всей его окружности за один оборот эксцентрика 8. При этом цилиндрическое отверстие 10 плавающего кольца 7 обкатывает неподвижный палец 11 приемной трубки 3.
Детали, насыпанные навалом в бункер 1, устремляются под действием силы тяжести к вращающейся воронке 2 и поштучно западают в ее выходное отверстие 9. При прохождении детали 15 через выходное отверстие 9 плавающее кольцо 7, совершающее радиальные колебания, своей
выступающей частью смещает деталь поочередно в разных радиальных направлениях (фиг.2 и 3), освобождая ее от возможного защемления соседними деталями, так как они расталкиваются самой проходящей через выходное отверстие 9 деталью вследствие ее радиальных колебаний, сообщаемых ей колебаниями плавающего кольца 7. Таким образом, радиальные колебания детали 15 уменьшают давление на нее соседних деталей и способствуют ускорению ее полного западания в приемную трубку 3 под действием собственной силы тяжести.
Частичное выступание плавающего кольца 7 за поверхность выходного отверстия 9 воронки 2 не мешает западанию в приемную трубку 3 следующей детали даже в случае попадания нижнего конца детали на выступающую часть плавающего кольца 7, так как благодаря наличию входной фаски 16 в отверстии плавающего кольца 7 (фиг,2 и 3) и радиальным колебаниям плавающего кольца нижний конец детали обязательно попадает в отверстие плавающего кольца за один оборот эксцентрика 8. В приемной трубке 3 детали накапливаются столбиком, а нижняя деталь механизмом поштучной выдачи (не показан) выдается на позицию технологического оборудования или транспортного устройства.
Формула изобретения
1Загрузочное устройство, содержащее основание, закрепленный на нем бункер, размещенный в его дне захватный орган,
выполненный в виде воронки, установленной с возможностью вращения, и приемную трубку, закрепленную на основании под воронкой соосно с ней, отличающееся тем, что, с целью повышения надежности в
работе, устройство снабжено кольцом, установленным между воронкой и приемной трубкой с возможностью колебаний в горизонтальной плоскости посредством дополнительно введенного привода и частичного
перекрытия входного отверстия приемной трубки и выходного отверстия воронки.
2Устройство поп.1,отличающее- с я тем, что привод колебаний кольца выполнен в виде кольцевого копира, установленного с возможностью вращения в направлении, противоположном направлению вращения воронки, и контактирования с кольцом, и направляющего элемента, выполненного в виде закрепленного в приемной
трубке пальца, размещенного в дополнительно выполненном в кольце цилиндрическом отверстии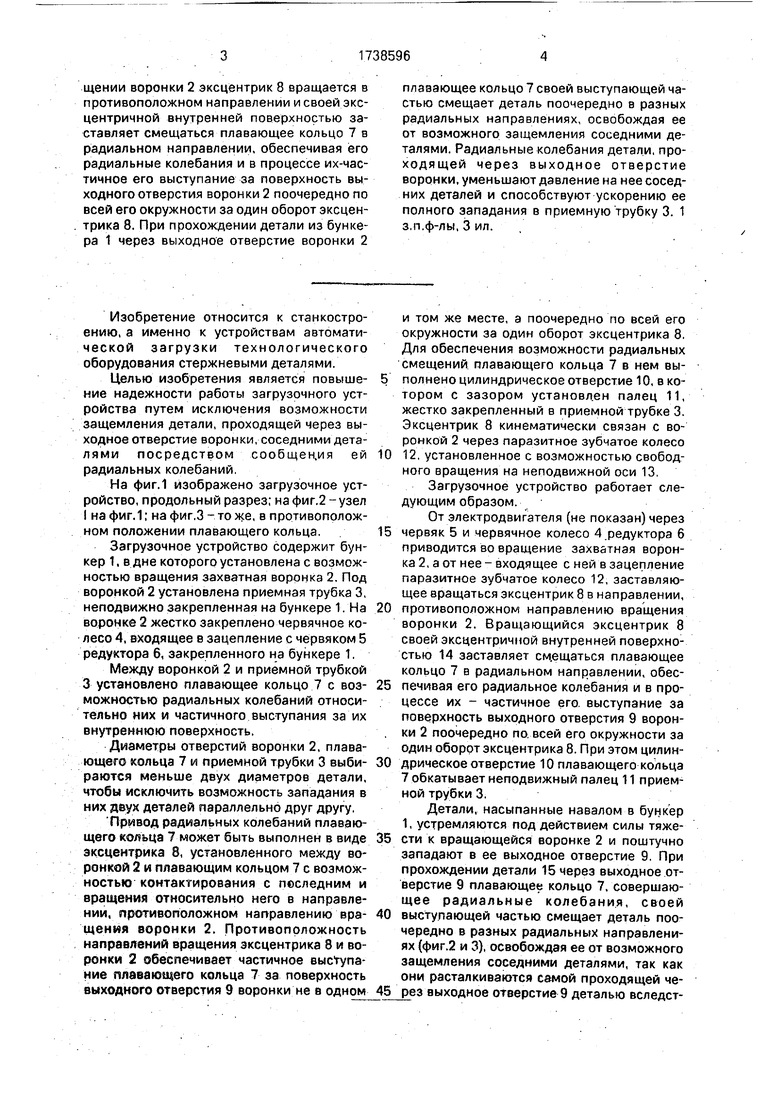
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1990 |
|
SU1731582A1 |
| Загрузочный ротор | 1989 |
|
SU1602677A1 |
| Загрузочное устройство | 1987 |
|
SU1521554A2 |
| Загрузочное устройство | 1986 |
|
SU1380902A1 |
| Роторный автомат питания | 1984 |
|
SU1229013A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Загрузочный ротор | 1989 |
|
SU1683965A2 |
| Ротор загрузки | 1979 |
|
SU850349A1 |
| Устройство для групповой загрузки цилиндрических деталей | 1975 |
|
SU552171A1 |
| Загрузочное устройство | 1988 |
|
SU1593903A1 |
Использование: для автоматической загрузки технологического оборудования стержневыми деталями. Сущность изобретения: устройство содержит бункер 1, захватную воронку 2 и приемную трубку 3. Между воронкой 2 и приемной трубкой 3 установлено плавающее кольцо 7 с возможностью радиальных колебаний относительно них и частичнрго выступления за их внутреннюю поверхность. Привод радиальных колебаний плавающего кольца 7 выполнен в виде эксцентрика 8, установленного между воронкой 2 и плавающим кольцом 7 с возможностью контактирования с последним и вращения относительно него в направлении, противоположном направлению вращения воронки 2. При вра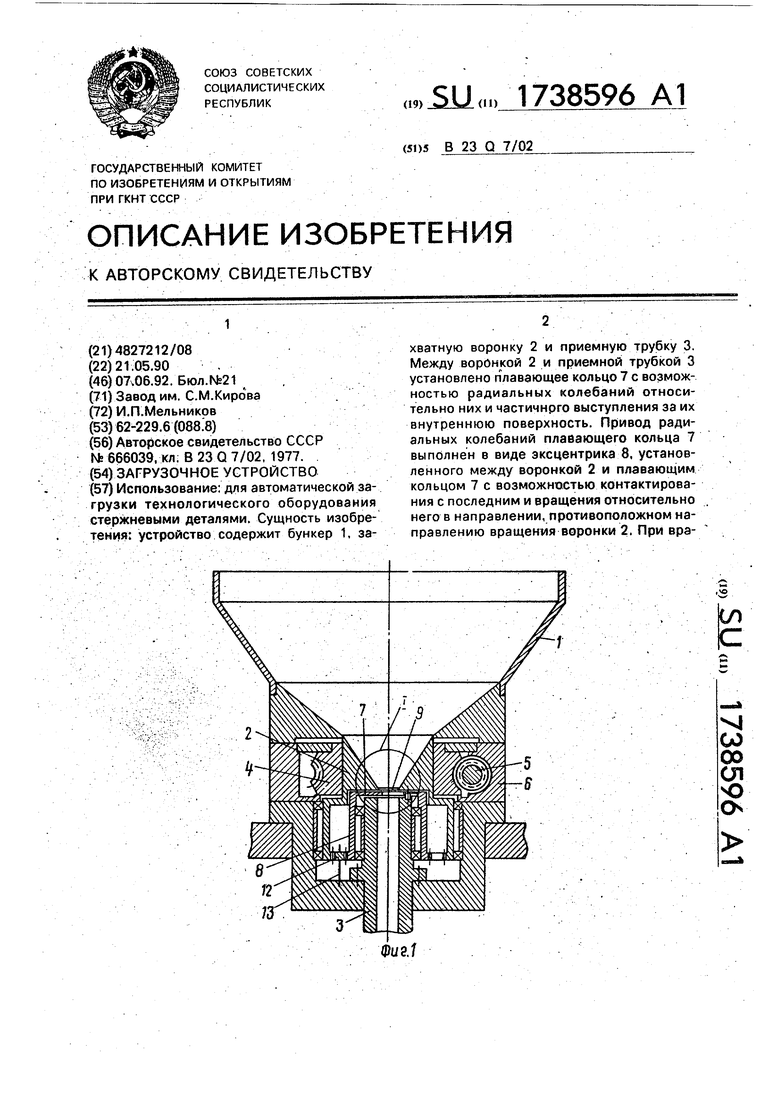
г
| Роторный автомат питания | 1977 |
|
SU666039A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
