(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное поворотное приспо-СОблЕНиЕ | 1979 |
|
SU837736A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Захватное устройство | 1979 |
|
SU848268A1 |
| Захватное устройство | 1988 |
|
SU1542795A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Многопозиционный штамп для обработки штучных заготовок | 1980 |
|
SU940950A1 |
| Устройство для зажима деталей | 1977 |
|
SU657952A1 |
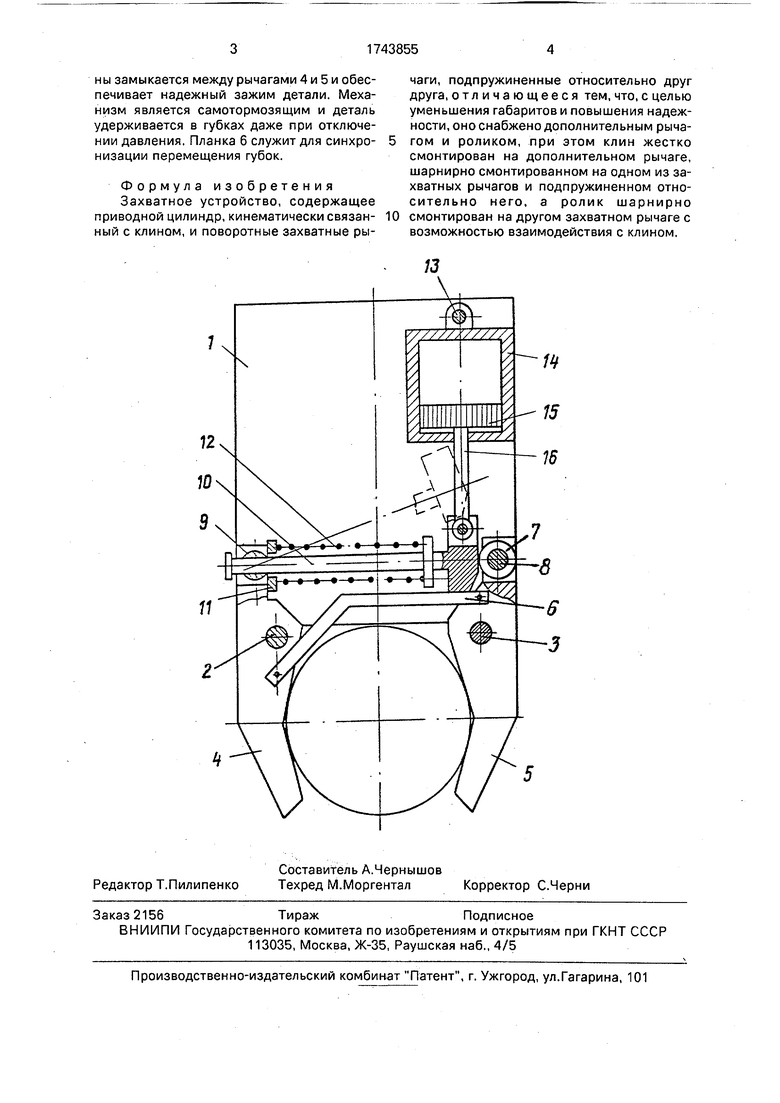
Захватное устройство относится к области робототехники и может быть использовано в промышленных роботах для обслуживания металлорежущих станков. Целью изобретения является уменьшение габаритов и повышение надежности. Захват состоит из корпуса 1, на осях 2 и 3 шарнирно установлены захватные рычаги 4 и 5, На рычаге 4 шарнирно смонтирован дополнительный рычаг 10 с клиновым участком. На рычаге 5 шарнирно смонтирован ролик 7. Дополнительный рычаг 10 кинематически связан со штоком 16 пневмоцилиндра 14. При взаимодействии с деталью рычаги 4 и 5, преодолевая усилие пружины (на чертеже не показано), поворачиваясь на осях 2 и 3, захватывают деталь. Под действием давления поршень 15 опускается и связанный с его штоком 16 дополнительный рычаг 10, поворачиваясь, взаимодействует своей клиновой частью с роликом 7, обеспечивая надежный зажим детали.
Захватное устройство относится к области робототехники, в частности к устройствам для зажима и транспортировки цилиндрических изделий, и может быть использовано в промышленных роботах для обслуживания металлорежущих станков.
Целью изобретения является уменьшение габаритов и повышение надежности за счет обеспечения надежного удержания детали при сбросе давления в приводе.
На чертеже показано захватное устройство, общий вид.
В корпусе 1 установлены оси 2 и 3, на которых сидят поворотные рычаги 4 и 5 соответственно. Рычаги шарнир-но связаны с планкой 6 и стянуты слабой пружиной (на чертеже не показана). Ролик 7 установлен на оси 8 рычага 5, а в поперечное отверстие оси 9, шарнирно установленной в рычаге 4, свободно входит конец дополнительного рычага 10. На другом конце этого рычага имеется клиновый участок. На рычаге 10
между его буртом и ограничительной шайбой 11 установлена пружина сжатия 12. В корпусе 1 на оси 13 установлен пневмоци- линдр 14 с поршнем 15, шток 16 которого шарнирно связан с клиновым участком рычага 10.
При захвате корпус 1 опускается к детали. Поршень 15 цилиндра 14 находится в верхнем положении и клиновой участок дополнительного рычага 10 выведен из контакта с роликом 7. При взаимодействии с деталью рычаги 4 и 5, преодолевая сопротивление стягивающей их пружины и поворачиваясь вокруг осей 2 и 3, захватывают деталь и замыкаются на ней под действием той же пружины. Затем давление подается в верхнюю полость цилиндра 14, поршень 15 опускается и связанный с его штоком дополнительный рычаг 10 поворачивается в положение, показанное на чертеже, и своим клиновым участком взаимодействует с роликом 7, сжимая пружину 12. Усилие пружиviGJ 00 СЛ СЛ
ны замыкается между рычагами 4 и 5 и обеспечивает надежный зажим детали. Механизм является самотормозящим и деталь удерживается в губках даже при отключении давления. Планка 6 служит для синхронизации перемещения губок.
Формула изобретения Захватное устройство, содержащее приводной цилиндр, кинематически связанный с клином, и поворотные захватные ры0
чаги, подпружиненные относительно друг друга, отличающееся тем, что, с целью уменьшения габаритов и повышения надежности, оно снабжено дополнительным рычагом и роликом, при этом клин жестко смонтирован на дополнительном рычаге, шарнирно смонтированном на одном из захватных рычагов и подпружиненном относительно него, а ролик шарнирно смонтирован на другом захватном рычаге с возможностью взаимодействия с клином.
| НАНОКОМПОЗИЦИОННЫЙ ПОЛИМЕРНЫЙ МАТЕРИАЛ, СПОСОБ ЕГО ПОЛУЧЕНИЯ И ДЕЗИНФИЦИРУЮЩЕЕ СРЕДСТВО НА ЕГО ОСНОВЕ | 2009 |
|
RU2424797C1 |
