Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для автоматического и ручного управления самоходными машинами.
Известна система автоматического вождения с датчиками первичной информации, схемой обработки и главным переключателем режимов работы. САВ-1М предназначена для автовождения самоходной машины, имеющей механизм рулевого управления с гидроцилиндром поворота, управляемых колес.
Недостатком системы является то, что в ней при переходе с ручного управления на автоматическое и наоборот главный переключатель коммутирует цепь электрического питания всей системы. Это приводит к появлению переходных процессов в схеме обработки входных сигналов и соответственно к снижению точности вождения.
Известно также устройство для автоматического и ручного управления самоходными колесными машинами, содержащее переключающее устройство, датчики первичной информации, блок обработки, усилитель, мощности, электрогидравлический сервомеханизм и гидроцилиндр, соединенный с механизмом ручного управления машиной, в котором для облегчения перехода с ручного управления на автоматическое и наоборот переключающее устройство включено в электрическую схему управления сервомеханизмом.
Недостатком известного устройства является то, что в процессе ручного вмешательства в режим управления машиной, переключающим устройством производят отключение на некоторое время одного из каналов связи датчиков первичной информации с блоком обработки. При этом поступающий по другому каналу сигнал, величина
Х|
сл о
4 СЛ Ю
которого превосходит максимальную входную разностную величину напряжения, приводит к появлению переходных процессов в блоке обработки входных сигналов. Дополнительный недостаток известного устройства состоит в том, что ручное управление осуществляется не привычным способом, Наличие указанных недостаткое затрудняет управление машиной и приводит к снижению устойчивости вождения при переходе с ручного управления на втоматическое и наоборот.
Цель изобретения - повышение точности вождения.
Указанная цель достигается тем, что устройство для автоматического и ручного уп- равления самоходными машинами, содержащее два датчика информации, переключатель, блок обработки сигналов, усилитель мощности, электрогидравлический сервомеханизм управления, механизм ручного управления и гмдроцилиндр поворота управляемых колес, причем датчики информации подключены к входам блока обработки сигналов, а выход усилителя мощности соединен с входом электрогидравлического сервомеханизма, при этом его гидравлический выход и гидравлический выход механизма ручного управления соединены посредством трубопроводов с гидроцилиндром поворота управляемых колес, снабжено схемой запрета управляющий вход которой соединен с переключателем, а другой ее вход соединен с выходом блока обработки сигналов, кроме того выход схемы запрэта соединен с входом усилителя мощности.
В предлагаемом устройстве, в отличие от известных, при переходе с ручного управления на автоматическое и наоборот переключатель посредством схемы запрета воздействует только на сервомеханизм, что исключает возникновение переходных процессов в блоке обработки сигналов. Кроме того, оно позволяет осуществлять ручное управление привычным способом
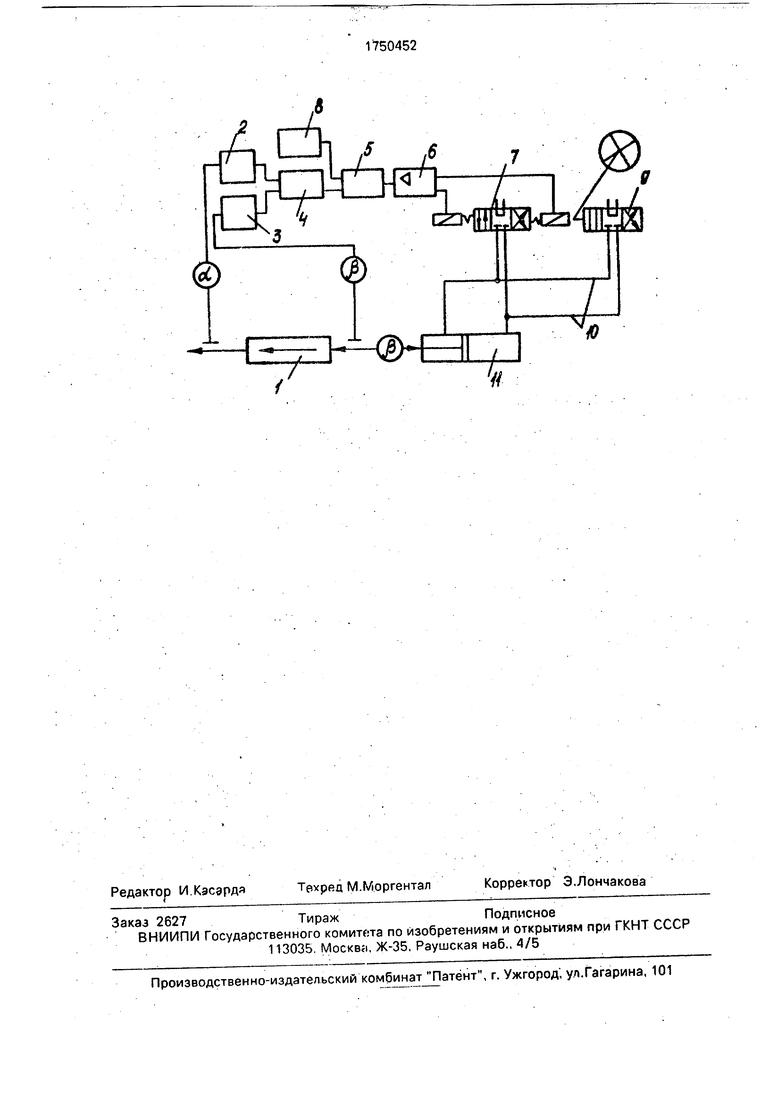
На чертеже представлена схема устройства для автоматического и ручного управления самоходной машиной.
Устройство для автоматического и ручного управления самоходной машиной 1 содержит датчик 2 копирующего устройства и датчик 3 обработки связи, которые подключены к входу блока 4 обработки сигналов. Выход блока обработки сигналов чере схему 5 запрета и усилитель 6 мощности соединен с электрогидравлическим сервомеханизмом 7 В цепь управления хе- мы 5 запрета включен переключатель 8
Гидравлические выходы сервомеханизма 7 и механизма 9 ручного управления соединены трубопроводами 10 с гидроцилиндром 11.
Устройство работает следующим образом,
В момент перехода на режим автоматического управления схема 5 запрета командой переключателя 8 открывается для
прохождения управляющего сигнала через усилитель 6 мощности на сервомеханизм 7. Управляющий сигнал вырабатывается блоком 4 обработки в результате преобразования сигналов датчика 2 копирующего
устройства и датчика 3 обратной связи по положению / гидроцилиндра 11. Сервомеханизм 7 по трубопроводам 10 направляет рабочую жидкость в гидроцилиндр 11 для изменения направления машины 1 в сторону уменьшения ошибки а.
Переход на ручное управление осуществляется командой переключателя 8, закрывающего схему 5 запрета для прохождения управляющего сигнала. Сервомеханизм 7
находится в нейтральном положении, а функция управления передается механизму 9 ручного управления.
Воздействие переключателя через схему запрета только на сервомеханизм по
сравнению с известным устройством исключает возникновение переходных процессов в блоке обработки сигналов, что повышает точность вождения при переходе с ручного управления на автомагическое и наоборот.
Формула изобретения
Устройство для автоматического и ручного управления самоходной машиной, содержащее два первичных датчика, переключатель, блок обработки сигналов,
усилитель мощности электрогидравлический сервомеханизм управления, механизм ручного управления и гидроцитшндр поворота управляемых колес, причем первичные датчики подключены к входам блока обработки информации, а выход усилителя мощности соединен с входом электрогидравлического сервомеханизма, при этом его гидравлический выход и гидравлический выход механизма ручного
управления соединен посредством трубопроводов с гидроцилиндром поворота управляемых колес, отличающееся тем, что, с целью повышения точности вождения, устройство снабжено схемой запрета, управляющий вход которой соединен с переключателем, а другой ее вход соединен с выходом блока обработки сигналов, выход схемы обработки сигналов соединен с входом усилителя мощности.
I /м/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1986 |
|
SU1396979A1 |
| Система рулевого управления транспортного средства | 1985 |
|
SU1710420A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Манипулятор для очистки и окраски корпусов судов | 1978 |
|
SU789320A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Система рулевого управления транспортного средства | 1980 |
|
SU872358A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Адаптивная автоматическая система вождения самоходных уборочных машин вдоль убираемых рядков | 1981 |
|
SU1007572A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
Использование; изобретение относится к области сельскохозяйственного машиностроения, в частности к устройствам для автоматического и ручного управления самоходными машинами. Сущность изобретения: устройство дает возможность сохранить устойчивость вождения при переходе с ручного управления на автоматическое и наоборот, что достигается тем, что между блоком обработки входных сигналов и сервомеханизмом введено запрещающее устройство, цепь управления которого соединена с переключающим устройством. 1 ил.
Редактор И Кэсэрдя
Техред М.Моргентал
Заказ 2627ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 11303Б Москвя, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г, Ужгород, уп.Гагарина, 101
Корректор Э.Лончакова
| 0 |
|
SU381188A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
