Известен но основному авт. св. № 140669 автомат для сборки тяговой разборной цепи, состоящий из механизма комплектования звеньев с заведением пальцев без их поворота и механизма выкладки цепи в П-образную форму и поворота пальцев.
В предлагаемом автомате для сборки тяговой разборной цепи, в частности по ГОСТу 589-54, механизм выкладки цепи и поворота пальцев выполнен в виде качающегося рукава, укладывающего цепь П-образно в вертикальной плоскости. В механизме имеются горизонтальные захваты, служащие для удержания и перемещения внутренних и наружных звеньев. Две плиты с поворотными вилками, расположенные с двух сторон захватов, служат для удерживания звеньев во время движения захватов и для поворота пальцев.
Предложенная конструкция механизма выкладки цепи и поворота пальцев повыщает производительность автомата.
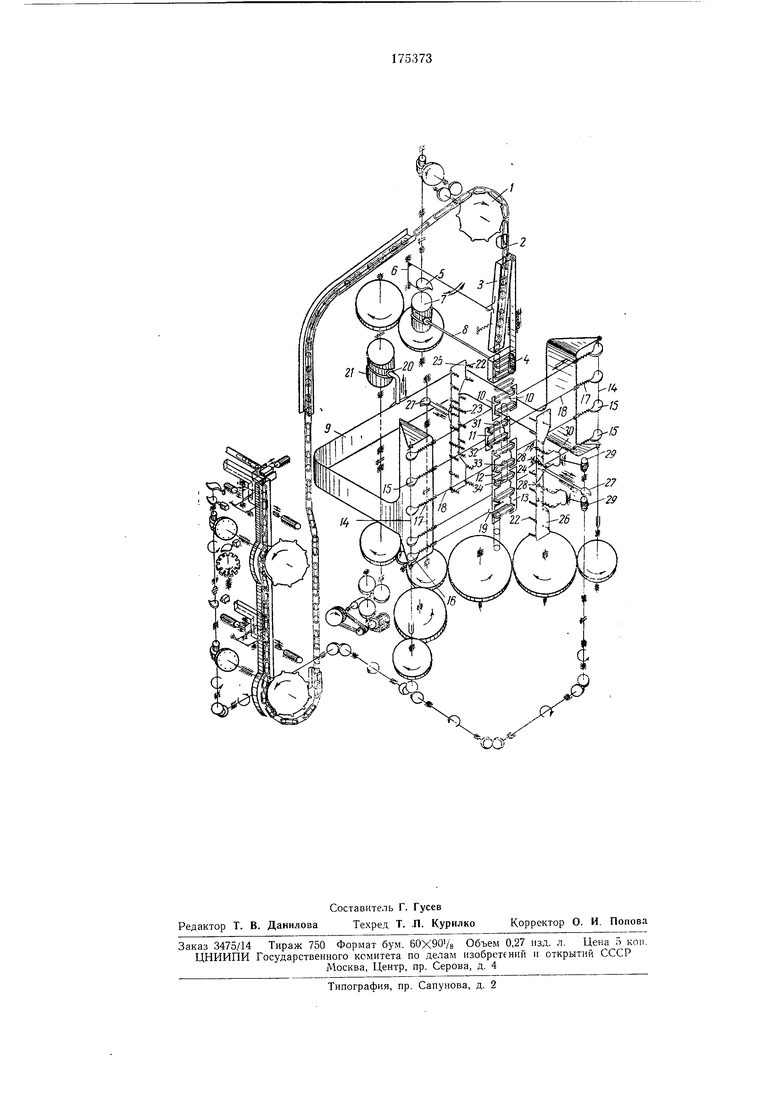
На чертеже показана кинематическая схема описываемого автомата.
Автомат для сборки тяговой цепи состоит из механизма комплектования звеньев с заведением пальцев без их поворота (конструкция которого одинакова с аналогичным механизмом в известном автомате) и механизма выкладки цепи в П-образную форму и поворота пальцев.
В механизм выкладки цени и поворота пальцев предварительно собранная цепь лодаетгя периодически со звездочки / через 1еподвижный лоток 2, которым она направляется в качающийся рукав 3. Последний щарнирно закреплен на стенке канала 4. Кулачок 5 через рычаг 6 сообщает рукаву 3 качательпые движения, а кулачок 7 через рычаг 8 сообщает каналу 4 и рукаву 3 возвратно-поступательное движение.
При одновременном движении цепи от звездочки / и качательного и поступательного движения рукава 3 цепь в канале 4 укладывается П-образно так, что внутренние звенья располагаются горизонтально, а наружные вертикально.
Окончательная сборка цени заключается в повороте соединительных пальцев.
Каретка 9 несет на себе захваты 10, 11, 12 и 13 и кулачковые валы 14 с кулачками 15 if 16. Назначение захватов - удерживать и перемещать внутренние и наружные звенья. Кулачки 15 через пружины 17 и толкатели / перемещают захваты в горизонтальной плоскости, а кулачок 16 через пружину 17 перемещает вилку 19.
Ось ролика 20 жестко скреплена с кареткой 9 и сообщает ей пост тательное движение и вертикальной плоскости от вращения кулачкя 21. Таким образом захваты получают движение в горизонтальной и вертикальной плоскостях. Во время движения захватов в обеих плоскостях звенья цепи, вышедшие из канала 4, удерживаются подпружиненными упорами 22, 23 и 24, закрепленными в плнтах 25 и 26, распололсенных с двух сторон захватов н получающих возвратно-постунательное движение от кулачков 27 в плоскости, перпендикулярной движению захватов. Поворот пальцев осуш,ествляется следующим образом. Каретка 9 с разведенными захватами 10, 11, 12, 13 находится в верхнем положении. От поворота кулачков 15 толкатели 18 начинают сжимать захваты, нижние -плоскости захвато удерживают внутренЕгие звенья, плиты 25 и 26 с упорами благодаря повороту кулачков 27 отходят от захватов и освобождают наружные звенья. Каретка 9 с захватами и находящимися в них звеньями движется вниз; захваты заканчивают движение в горизонтальной плоскости н зажимают внутренние звенья с одновременным переменлением их до положения, когда их впадины расиоложатся перед наружными звеньями. Затем снова иодходят Т1ЛИТЫ 25 и 26 и упорами 22 с двух сторон сжимают пальцы (на чертеже не показано); упоры 23 и 24 досылают нарул ные звенья во впадины внутренних, а поворотные вилки 28, выиолненные совместно с упорами 24, охватывают головки четырех пальцев. От вращения кулачков 29 через промежуточную вилку 30 .производится поворот вилок 28, которые при этом поворачивают пальцы на 90°. Одновременно поворачиваются 4 пальца на позициях 31, 32, 33 и 34. Вывод наружных звеньев из впадины звеньев внутренних происходит при сжатии захватов 12, когда они находятся в верхнем положении, а наружные звенья с пальцами (на позиции 33 и 34) па впадины звеньев внутренних выводятся вилкой 19, перемещающейся от кулачка 16 в момент окончания хода захватов 13 вниз. Предмет изобретения Автомат для сборки тяговой разборной цени но авт. св. Ле 140669, отличающийся тем, что, с целью повышения производительности, механизм )5ыкладки цепи и поворота пальцев выполнен в виде качающегося рукава, укладывающего цепь П-образно в вертикальной плоскости, горизонтальных захватов, служащих для удержания и перемещения внутренних и паружиых звеиьев, и двух плит с поворотными вилками, расположенными с двух сторон захватов и служащими для удержания звеньев и поворота пальцев.
txr
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки тяговой разборно-штамповочной цепи | 1960 |
|
SU140310A1 |
| Автомат для сборки непрерывной тяговой разборной цепи | 1960 |
|
SU140669A1 |
| ПАТЕНТНО-ТЕХ}{Г€~НАЯБЧБЛИО~еКАИ. П. Терешин | 1971 |
|
SU292689A1 |
| Стенд для сборки цепей | 1977 |
|
SU721312A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Автомат сборки внутренних звеньев втулочнороликовых цепей | 1981 |
|
SU958034A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО НАКОПЛЕНИЯ ИЗДЕЛИЙ И ЗВЕНЬЕВАЯ ЦЕПЬ | 2009 |
|
RU2410312C1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| ПРИВОДНАЯ МУФТА АВАРИЙНОГО РАЗЪЕДИНЕНИЯ | 2021 |
|
RU2779806C1 |