7
А
.Г7
in
,, II III ;; 411
ITWP
СО
СО
)
(Риг 2
Изобретение относится к робототехнике и может быть использовано для автоматизации производственных процессов.
Целью изобретения является расширение функциональных возможностей и повышение надежности за счет компенсации относительных угловых смещений захвата и руки робота.
На фиг. 1 приведена схема руки робота с упругим запястьем; на фиг. 2 - запястье,
силы и момент, направленные в сторону компенсации погрешности позиционирования робота (фиг. 1).
В этом случае упругие стержни 2 сложно деформируются, а также поворачиваются на осях 3.
Тяга 6 через сферические головки 7 и фланцы 1 и 4 воспринимает осевое усилие.
Пружина 8 создает натяжение в кинематической цепи: фланец 1 - стержни 2-
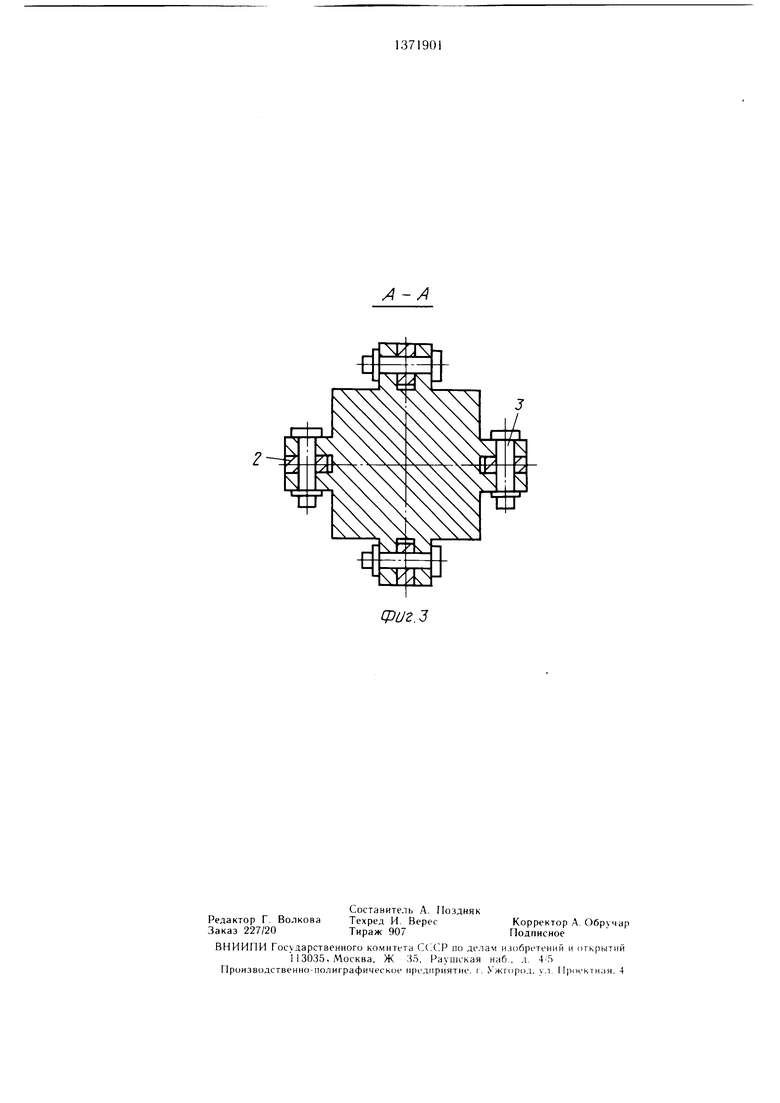
разрез; на фиг. 3 сечение А-А на фиг. 2. оси 3-фланец 4. Кроме того, она демпфи- Упругое запястье содержит фланец 1рует поперечные колебания в руке робота
для крепления руки робота, имеющий, на- от действия динамических нагрузок. пример, квадратное сечение, на каждой гра-При обратном движении упругие стерж}1и которого выполнены посадочные места ни возвращают фланцы 1 и 4 в исходное для закрепления упругих стержней 2 с ося- 15 положение относительно друг друга. мм 3. Вторыми концами упругие стержни 2
закреплены в посадочных местах фланцаФормула изобретения
4, один конец которого выполнен аналогично фланцу 1, а второй - в виде куба с направляющими поверхностями 5, и федназ- пачеп для крепления захвата. Для восприятия осевого усилия внутри запястья между фланцами 1 и 4 по оси запястья установлена тяга 6 в виде круглого стержня со сферическими головками 7 на концах, разме20
Упругое запястье робота, содержащее фланцы для крепления захвата и руки робота и упругие элементы, связывающие фланцы между собой, отличающееся тем, что, с целью расширения функциональных возможностей и повышения надежности за счет компенсации относительных угловых
шейными в сферических гнездах фланцев 25 и линейных смещений захвата и руки робота, оно снабжено тягой со сферическими щар- нира.ми, взаимодействующими с обоими фланцами по их центру, и пружиной сжатия, расположенной между фланцами, причем тяга расположена внутри пружины, а упругие элементы выполнены в виде стержней одинаковой длины, концы которых щар- нирно связаны с соответствующими фланцами, при этом оси шарниров стержней расI и 4.
На этой же оси между фланцами 1 и 4 установлена предварительно сжатая пружина 8 для натяжения кинематической цепи.
Упругое запястье манипуляционного робота работает следующим образом.
При взаимодействии направляющих поверхностей 5 фланца 4 с объектом со сто30
положены равномерно по окружности и по
РОНЫ последнего- в случае наличия погреш- ,, касательным к ней, а длина тяги равна дли- ностей позиционирования лр действуют не упругих стержней.
силы и момент, направленные в сторону компенсации погрешности позиционирования робота (фиг. 1).
В этом случае упругие стержни 2 сложно деформируются, а также поворачиваются на осях 3.
Тяга 6 через сферические головки 7 и фланцы 1 и 4 воспринимает осевое усилие.
Пружина 8 создает натяжение в кине20
Упругое запястье робота, содержащее фланцы для крепления захвата и руки робота и упругие элементы, связывающие фланцы между собой, отличающееся тем, что, с целью расширения функциональных возможностей и повышения надежности за счет компенсации относительных угловых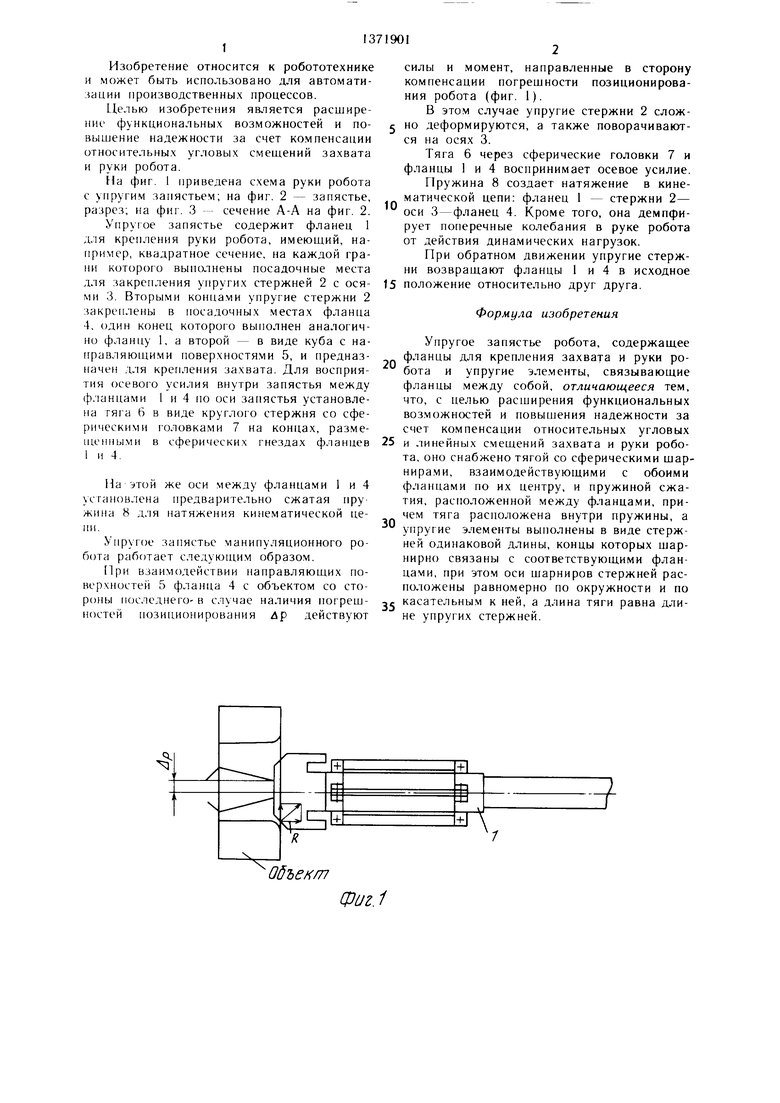
| название | год | авторы | номер документа |
|---|---|---|---|
| Запястье манипулятора | 1990 |
|
SU1754440A1 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Механическая рука манипулятора | 1986 |
|
SU1440710A1 |
| СБОРОЧНАЯ ГОЛОВКА | 1992 |
|
RU2035285C1 |
| Электромагнитное захватывающее устройство | 1990 |
|
SU1811483A3 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
Изобретение относится к робототехнике и может быть использовано для автоматизации нроизводственных процессов. Целью изобретения является расширение функциональных воз.можностей и повышение надежности за счет компенсации относительных угловых с.мещений захвата и руки робота. При взаимодействии направляю- ших поверхностей 5 фланца 4 с объектом, со стороны последнего в случае наличия ногрец ностей позиционирования др действуют силы в .момент, направленные в сторону компенсации погрешности позиционирования робота. Тогда упругие стержни 2 сложно деформируются, а также поворачиваются на осях 3. Тяга 6 через сферические головки 7 и фланцы 1 и 4 воспринимает осевое усилие Р. Пружина 8 создает натяжение в кинематической цепи: фланец I - стержни 2 - оси 3 -фланец 4. Кроме того, она демпфирует поперечные колебания в руке робота от действия динамических нагрузок. 3 ил. S (Л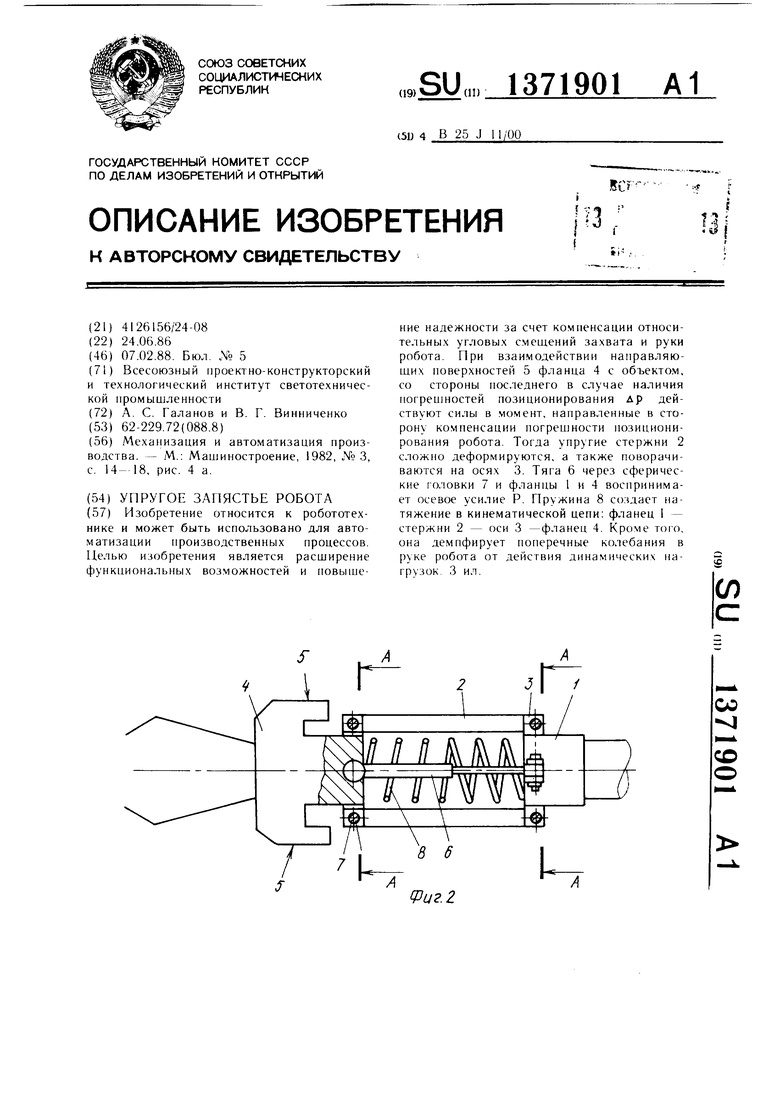
z
06ъе/ гп
Фиг.1
А-А
Фиг.З
| Механизация и автоматизация производства | |||
| - М.: Машиностроение, 1982, № 3, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
