чение (t;+1) . В блоке функционала качества 5 определяется значение функционала качества Р 3 (t;t() ( см
-х
(И гм
«,
дает разрешение на прохождение импуль- JQ ционала качества 5, записывается зна- са через блок 32 и 29, и производить запись данных x(t;, ) , ,2,..., ,,2,3 с объекта управления в пеовый блок памяти 2, сброс триггера 37 бпо- ка функционала качества 55 запуск re- j нератора 4, запись заданного состояния объекта управления в блок памяти 38, перезапись uofir(t ;) из шестого блока памяти 15 в седьмой блок памяти
16 и в четвертый блок памяти 8. Де- 20 шифратор 27 выдает команду Пуск модели, по которой запускается модель объекта 3. Модель объекта 3 решается при начальных условиях, определяемых состоянием объекта управления 1 в мо- 25 мент времени , , xkHqi(-xK(t;.1) , ,3,3, ,2,..., подаваемых на входы блока 3 с выходов первого блока памяти 2 и управления u(t, )u0f)T(t, ), подаваемого с выхода шестого блока 30 памяти 15. Решение уравнений модели объекта 3 определяет состояние объекта управления 1 (t; ) для момента времени . Через Д t - время решения уравнений модели объекта 3 дешифратор команд 27 подает команду Останов, в соответствии с которой прекращается решение уравнений модели объекта и на выходе блока 3 устанавливаются значения ). Дешифра- я тор команд 27 выдает команду Запись в первый блок памяти, по которой данные с выхода блока 3 поступают в блок 2. С выхода дешифратора 27 поступает команда Исходной положение , в соответствии с которой модель объекта управления 3 возвращается в исходное положение. С выхода дешифратора 27 поступает команда Пуск модели, по которой начинается решение уравне- Q ний модели объекта 3 для интервала времени (tj,t,-.,., ). В качестве начальных условий модели объекта 3 используются результаты решения модели
35
Блок 27 выдает команду Запись в третий блок памяти, в соответствии с которой j-итерация функционала качества, вычисленная на предыдущем интервале времени (t;.,,t;) Ф} (t,1), записывается из второго блока памяти 6 в третий блок памяти 7.
Затем блок 27 выдает команду Запись во второй блок памяти, в соответствии с которой значение функционала качества ф ( (t j + I ) с выхода блока 5 передается во второй блок памяти 6. Блок 27 выдает команду Запись в пятый блок памяти, вссоответствии с которой управление u (t ) „ записывается в пятый блок памяти 9 из четвертого блока памяти 8. В четвертом блоке памяти 8 хранится управление ) u(JfTT(tj) . С помощью первого сумматора 10 блока умножения 12, второго сумматора 11, блока 13, четвертого блока памяти 8, третьего сумматора 14 определяется j-итерация управления для интервала времени (t;,tl4; ) .
J(tUl)u(-(1(tU()
45
Z(H(tu,)(t;)
(tJ
Это управление u1 (t,-+I) подается на вход блока модели объекта управления 3. Затем блок 27 подает команду
Пуск модели, в соответствии с которой решаются уравнения модели объекта управления 3 при начальных условиях х мчс|1,хгм(с; ) и управлении u u4t;4.1).
Через Д t блок 27 выдает команду
xKW(t; ) на интервале времени () 55 Останов, в соответствии с которой и управление (t;H) uonr (t;) . Через прекращается решение уравнений модели At выдается команда Останов с выхода блока 27, в соответствии с которой прекращается решение уравнений модели
объекта 3 и на выходе блока 3 устанавливаются значения xjJM(t,-f(), j 1,2,..., ,2,3, т.е. определяется состояние
чение (t;+1) . В блоке функционала качества 5 определяется значение функционала качества Р 3 (t;t() ( см
ционала качества 5, записывается зна-
-х
(И гм
«,
ционала качества 5, записывается зна-
Блок 27 выдает команду Запись в третий блок памяти, в соответствии с которой j-итерация функционала качества, вычисленная на предыдущем интервале времени (t;.,,t;) Ф} (t,1), записывается из второго блока памяти 6 в третий блок памяти 7.
Затем блок 27 выдает команду Запись во второй блок памяти, в соответствии с которой значение функционала качества ф ( (t j + I ) с выхода блока 5 передается во второй блок памяти 6. Блок 27 выдает команду Запись в пятый блок памяти, вссоответствии с которой управление u (t ) „ записывается в пятый блок памяти 9 из четвертого блока памяти 8. В четвертом блоке памяти 8 хранится управление ) u(JfTT(tj) . С помощью первого сумматора 10 блока умножения 12, второго сумматора 11, блока 13, четвертого блока памяти 8, третьего сумматора 14 определяется j-итерация управления для интервала времени (t;,tl4; ) .
J(tUl)u(-(1(tU()
Z(H(tu,)(t;)
(tJ
Это управление u1 (t,-+I) подается на вход блока модели объекта управления 3. Затем блок 27 подает команду
Пуск модели, в соответствии с которой решаются уравнения модели объекта управления 3 при начальных условиях х мчс|1,хгм(с; ) и управлении u u4t;4.1).
Через Д t блок 27 выдает команду
Останов, в соответствии с которой прекращается решение уравнений модели
Останов, в соответствии с которой прекращается решение уравнений модели
объекта 3 и на выходе блока 3 устанавливаются значения xjJM(t,-f(), j 1,2,..., ,2,3, т.е. определяется состояние
объекта управления 1 для момента времени t t1 41 при управлении uj(tj+1 ).
Блок 27 выдает команду, в соответствии с которой в блоке,памяти 39 записывается значение (t ), а в девятый блок 38 поступает значение Xjg.Ct;-., ) В блоке 5 определяется значение функционала качества
2
Ч.Ьа н Э-Кгм }
Если ф (t;t() Рдоп то срабатывает триггер 37 в блоке функционала качества 5, который подает запрещающий сигнал в блок 32 и итерационная процедура поиска оптимального управления прекращается.
Блок 31 выдает команду Никл и в соответствии с этой командой устройство управления нагревом переходит к поиску оптимального управления для интервала времени (t,-+1 , t;+2) .
Если Р (Ь..)7ФЛЛ„ , то поиск опти
Доп
мального управления для интервала времени (t;, tj+l) продолжается до тех пор,пока не последует команда Цикл.
Блок 27 выдает команду Запись в третий блок памяти, в соответствии с которой в третий блок памяти 7 записывается предыдущее значение (j-1) - итерация функционала качества Ф (t;+l). Блок 27 выдает команду Запись во второй блок памяти, в соответствии с которой во второй блок памяти 6 записывается j-итерация функ ционала качества ф } (t jf)) . Блок 27 выдает команду Запись в пятый блок памяти, в соответствии с которой управление ur (t;+1) из четвертого блока памяти 8 записывается в пятый блок памяти 9.
Блок 27 выдает команду Запись в четвертый блок памяти ; в соответстви с которой управление uj(t;+l) записы- вается в четвертый блок памяти 8.
Затем определяется (j+1) - итерация управления для интервала времени
(tj.ti+i) ; ..,
0J(t;t,(t,4l)
u
(Н
u Wuo-ifuj(ti+l)ur (tif))
Это управление с выхода блока 14 через шестой блок памяти 15 подается на вход блока модели объекта 3. Блок 27 подает команду Пуск модели, в соответствии с которой решаются уравнения модели объекта управления 3
0
5
5
0
5
при начальных условиях xrjM KM(t;) и управлении uj (t;f,) для интервала времени (t;,t;H) и т.д.
Таким образом, изобретение позволяет определить для нелинейных нестационарных объектов оптимальное управление на каждом интервале дискретизации и тем самым повысить точность устройства.
Формула изобретения
Устройство управления нагревом, содержащее объект управления, три выхода которого подключены соответственно к первым трем информационным входам первого блока памяти, три выхода которого соединены соответственно с тремя входами установки начальных значений блока модели объекта управления, первый, второй и третий выходы блока модели объекта управления подключены к четвертому, пятому и шестому информационным входам пер-- вого блока памяти, второй выход блока модели объекта управления соединен с первым информационным входом блока функционала качества, второй информационный вход которого подключен к выходу генератора заданного состояния объекта управления, отличающееся тем, что, с целью повышения точности устройства, в него введены с второго по седьмой блоки памяти, три сумматора, блок формирования обратной величины, одиннадцать элементов И, два триггера, дешифратор, генератор импульсов, два счетчика, формирователь импульсов и два элемента задержки, причем выход блока функционала качества через второй блок памяти соединен с входом третьего блока памяти и с первым входом первого сумматора, второй вход которого подключен к выходу третьего блока памяти, выход четвертого блока памяти подключен к информационному входу пятого блока памяти и к первым входам второго и третьего сумматоров, выход первого сумматора и выход блока формирования обратной величины подключены к входам блока умножения, выход которого соединен с вторым входом третьего сумматора, выход которого через шестой блок памяти соединен с информационными входами четвертого и седьмого блоков памяти, а также с входом задания сигнала управления
91578698
блока модели объекта управления, выход пятого блока памяти соединен с вторым входом второго сумматора, выход которого подключен к входу блока формирования обратной величины, выход седьмого блока памяти соединен с входом объекта управления,, выходы первого и второго элементов И подклю10
ключей к входу генератора заданного состояния объекта управления, к пер вому и второму управляющим входам блока функционала качества, к входу формирователя импульсов, к входу пер вого элемента задержки, к первому уп равляющему первого блока памят и к установочному входу первого счет
чены к управляющим входам шестого бло-ю чика третий выход второго счетчика
ка памяти, первые три выхода дешифратора подключены х управляющим входам блока модели объекта управления, выходы с четвертого по десятый дешифратора соединены с первыми входами с третьего по девятый элементов И соответственно, выходы третьего, четвертого, пятого и шестого элементов И подключены соответственно к управляющим входам второго, четвертого, третьего и пятого блоков памяти, выход седьмого элемента И подключен к первым входам первого и второго элементов И и к первому входу первого триггера, выходы разрядов первого счетчика соединены с входами дешифратора, третий выход которого подключен к первому входу второго триггере, выход генератора импульсов подключен к входу второго счетчика, а также к первым входам десятог о и одиннадцатого элементов И, вторые входы которых соединены с первым выходом второго счетчика, второй выход которого под8
10
ключей к входу генератора заданного состояния объекта управления, к первому и второму управляющим входам блока функционала качества, к входу формирователя импульсов, к входу первого элемента задержки, к первому управляющему первого блока памяти и к установочному входу первого счет
соединен с вторым входом первого триггера, выход которого соединен с вторым входом первого элемента И, выход формирователя импульсов подключен к входу второго элемента задержки и к второму входу девятого элемента И, выход второго элемента задержки подключен к вторым входам с третьего по восьмой элементов И, выход восьмого элемента И соединен с третьим управляющим входом блока функционала качества, выход девятого элемента И соединен с вторым управляющим входом второго блока памяти, управляющий выход блока функционала качества соединен с вторым входом второго элемента И и с третьим входом одиннадцатого элемента И, выход которого подключен к второму входу второго триггера, выход которого подключен к третьему входу десятого элемента И, выход которого соединен с входом первого счетчика, а выход первого элемента задержки подключен к управляющему входу седьмого блока памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления инерционным объектом | 1988 |
|
SU1755262A1 |
| Устройство формирования оптимальных управляющих воздействий для обеспечения устойчивой работы сложных технических систем | 2017 |
|
RU2674281C1 |
| Устройство для решения уравнений математической физики | 1986 |
|
SU1363260A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1270779A1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Вычислительный блок матричного устройства для решения дифференциальных уравнений в частных производных | 1989 |
|
SU1605253A1 |
| Устройство для решения системы линейных алгебраических уравнений | 1986 |
|
SU1405073A1 |
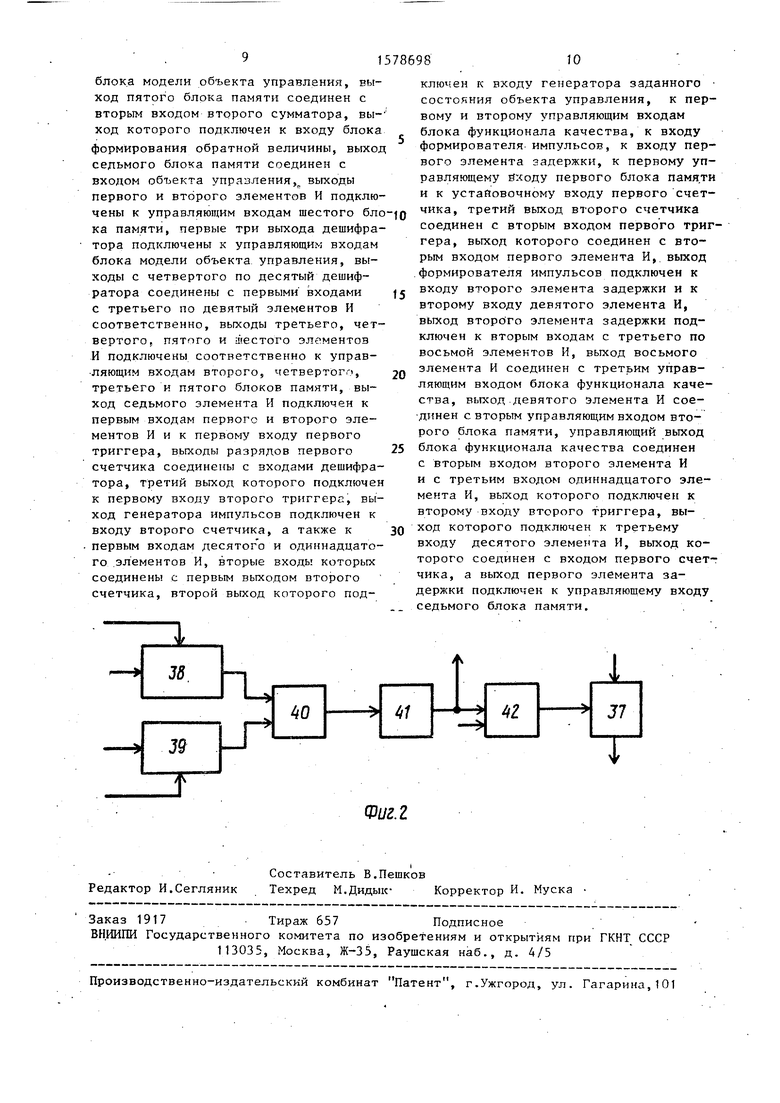
Изобретение относится к технике автоматического управления и может быть использовано в металлургической и химической промышленности. Изобретение решает задачу определения оптимального управления для нелинейных объектов на каждом шаге дискретизации, что позволяет повысить точность устройства. Устройство управления нагревом содержит объект управления 1, семь блоков памяти 2, 6 - 9, 15, 16, блок модели объекта управления 3, генератор 4 заданного состояния объекта управления, блок функционала качества 5, три сумматора 10, 11, 14, одиннадцать элементов И 17, 18, 20 - 26, 29, 32, два триггера 19, 33, дешифратор 27, генератор импульсов 28, два счетчика 30, 31, два элемента задержки 34, 36 и формирователь импульсов 35. 2 ил.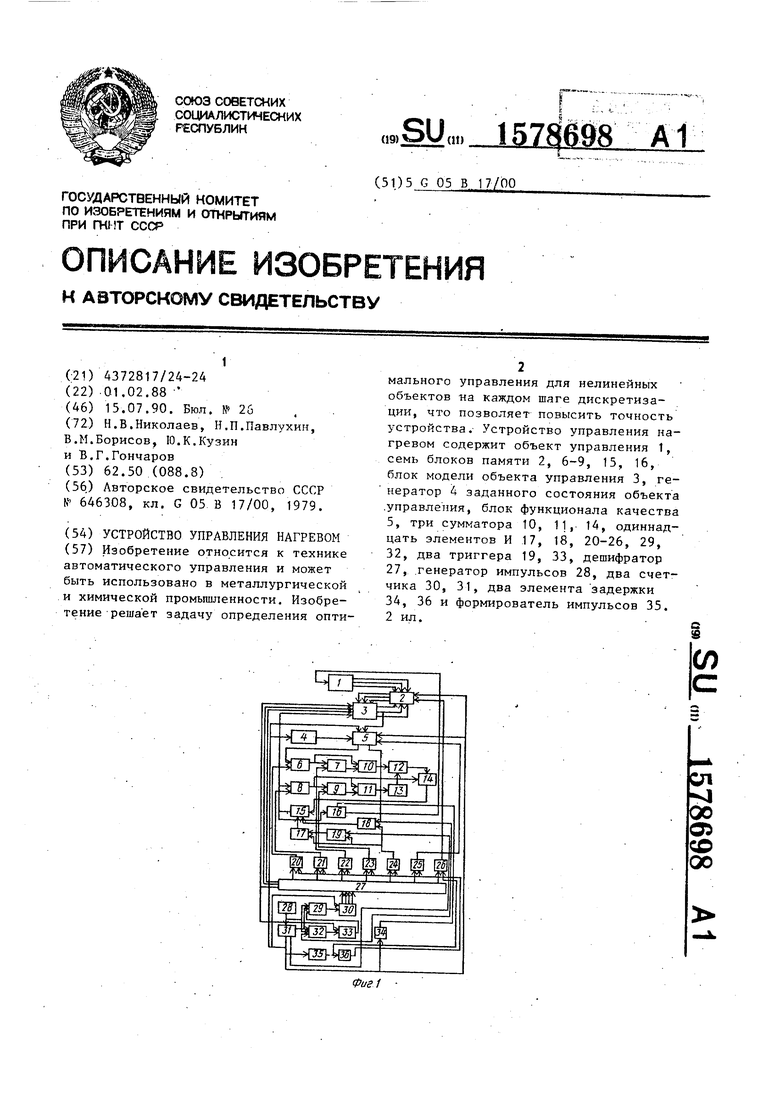
| Квазиоптимальный регулятор | 1976 |
|
SU646308A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
