Изобретение относится к обработке металла давлением, в частности к оборудованию для транспортировки обрабатываемых изделий.
Известно устройство для поперечной передачи длинномер ных изделий, включающее жестко установленные на приводном валу рычаги, обеспечивающее передачу изделий с рольганга на другой рольганг или стеллаж.
При такой конструкции устройства рычаги совершают возвратно-поступательное движение по одинаковой траектории. При интенсивной подаче изделий по рольгангу не исключены соударения их с рычагами, приводящие к порче изделия, поломке рычагов, снижению надежности в работе механизма.
Известно устройство, предназначенное для передачи изделия с направляющих на приемные места В момент захвата изделие находится в статическом состоянии. Если
бы изделие двигалось продольно, то в момент подъема изделия захватом последний был бы поврежден последующим изделием
Устройство для перегрузки изделий с одного конвейера на другой, принятое за прототип, кинематически чрезвычайно сложно, имеет те же недостатки, что известные устройства и низкую надежность в работе.
С целью повышения надежности в работе и производительности предлагаемое устройство включает установленный на основании вал, жестко закрепленные на нем несущие рычаги возвратно-поступательного перемещение, шарнирно установленные на последних передающие рычаги с ограничивающими поворот выступами и установленное на основании приспособление управления передающими рычагами.
Отличается устройство тем, что оно снабжено смонтированными на передающих рычагах контргрузами, каждый из котоVI
(Л
сь ю
о
рых выполнен в виде поводка с роликом, а приспособление управления передающими рычагами - в виде копиров, установленных на основании шарнирно с возможностью взаимодействия с роликами передающих рычагов и упоров для ограничения поворота копиров.
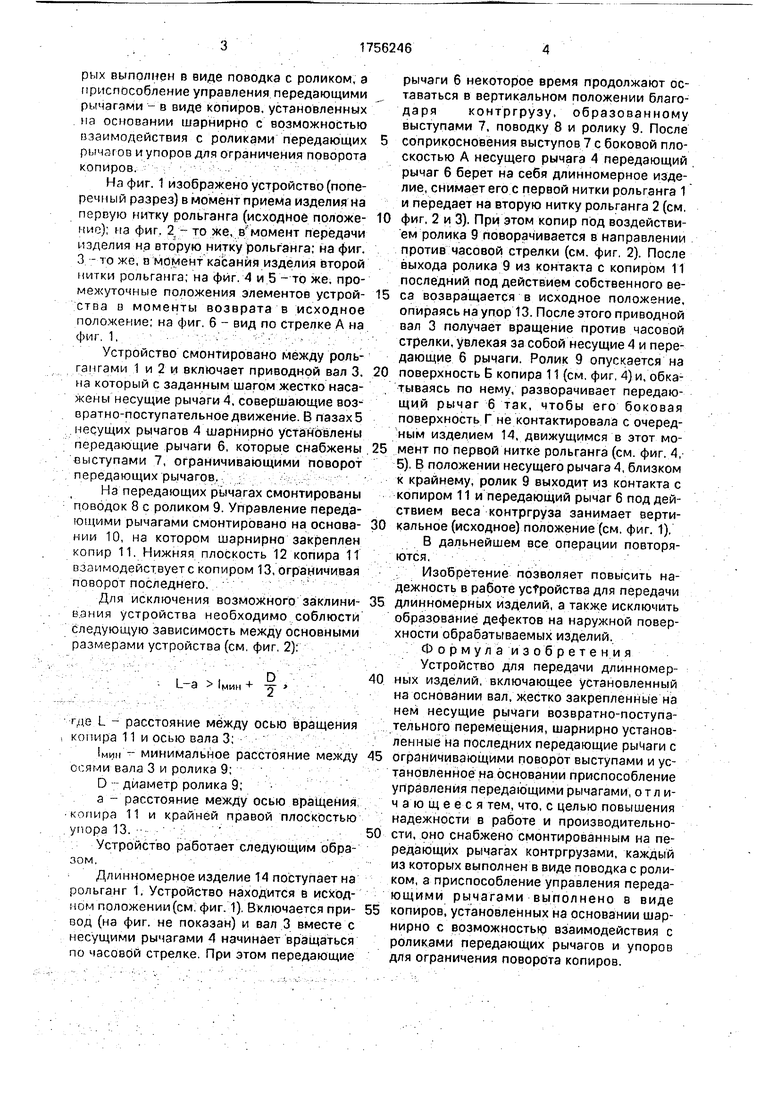
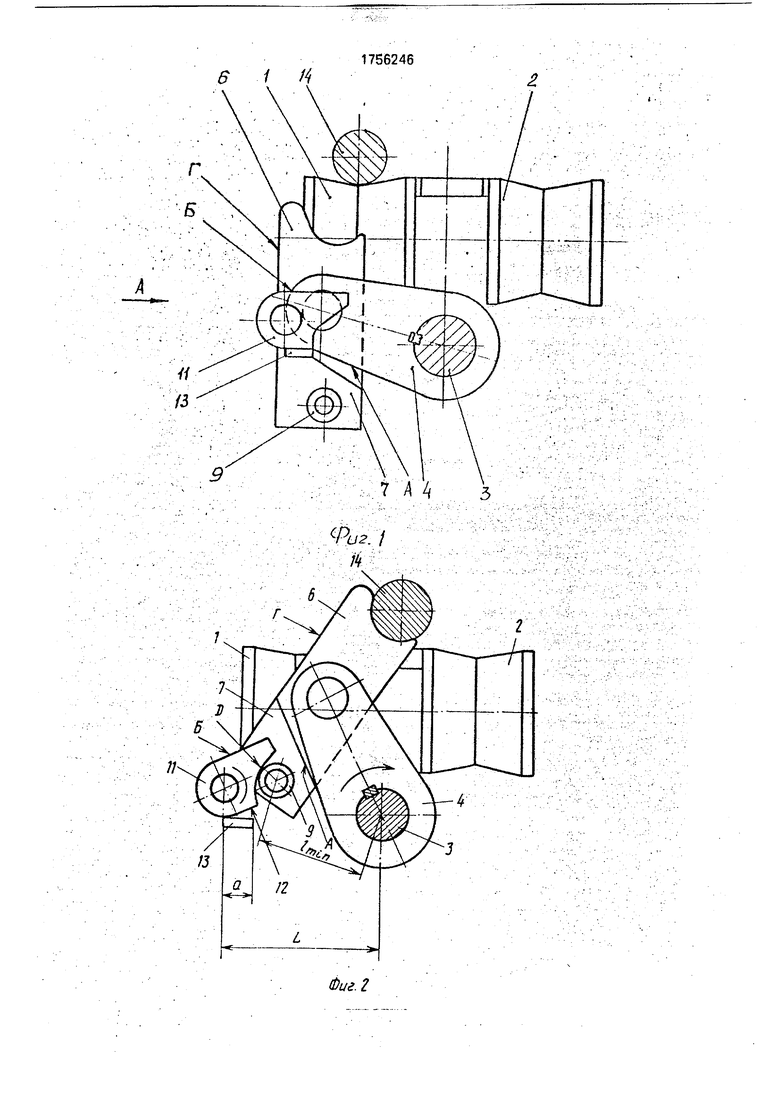
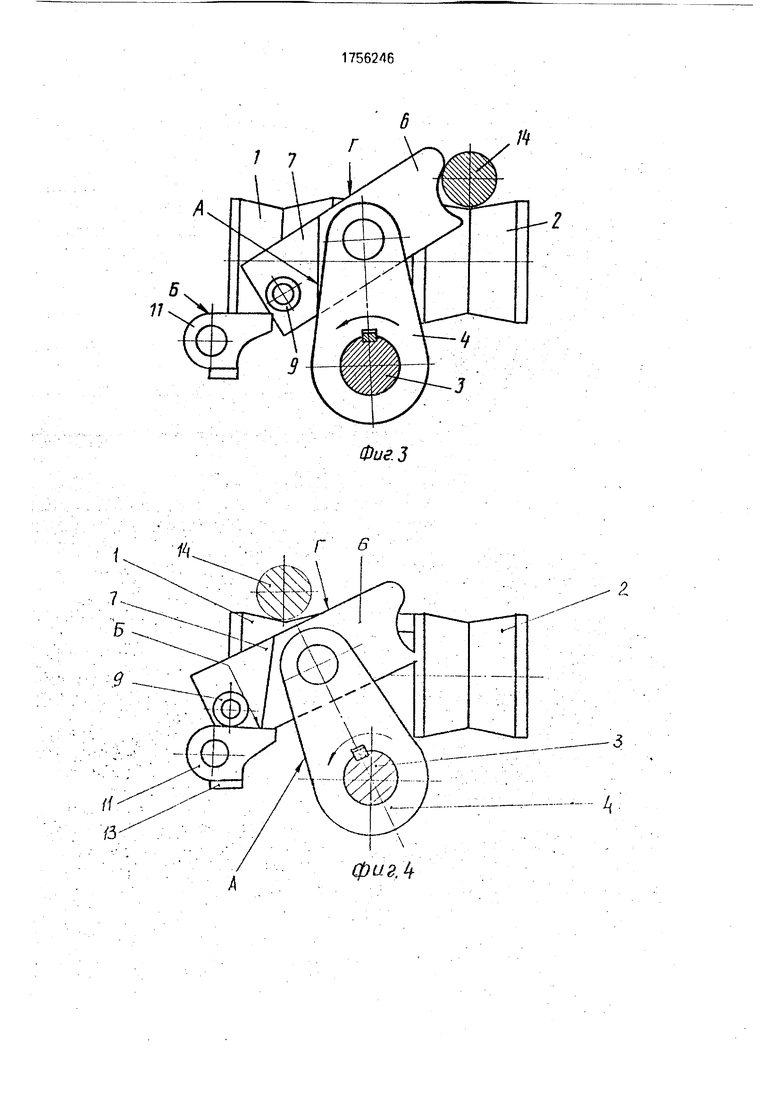
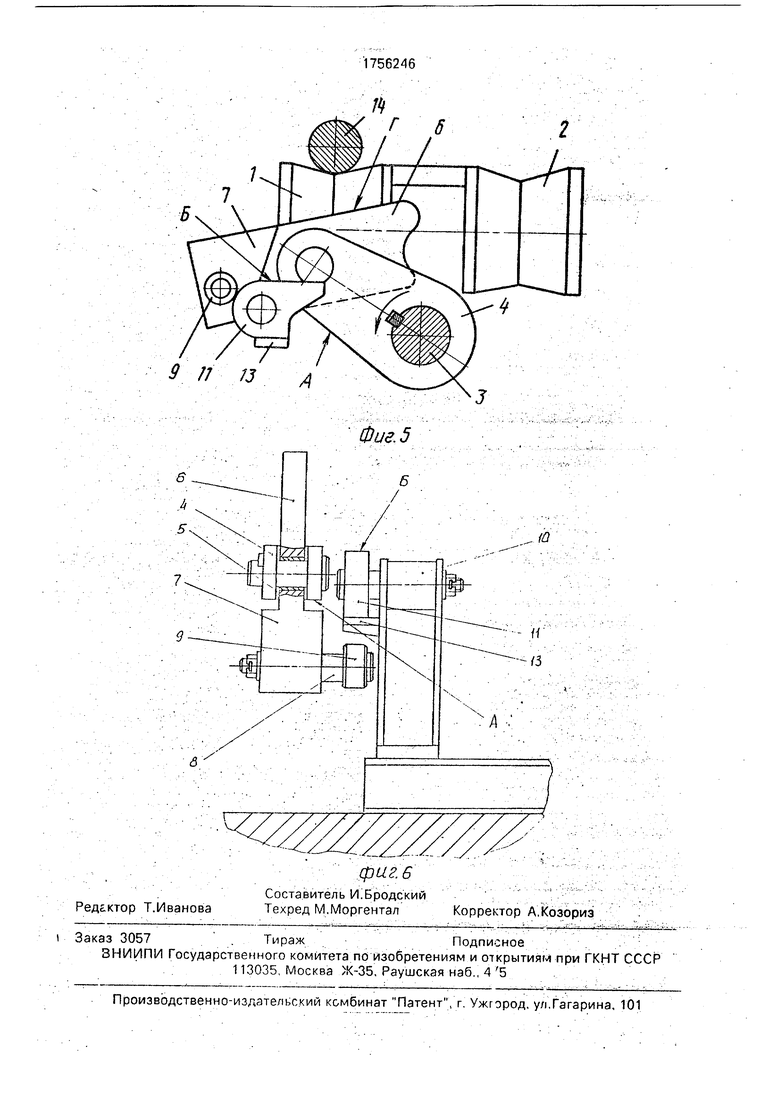
На фиг. 1 изображено устройство (поперечный разрез) в момент приема изделия на первую нитку рольганга (исходное положение); на фиг, 2,- то же, в момент передачи изделия на вторую нитку рольганга; на фиг. 3-ю же, в момент касания изделия второй нитки рольганга; на фиг. 4 и 5 - то же, промежуточные положения элементов устройства в моменты возврата в исходное положение; на фиг. 6 - вид по стрелке А на фиг. 1,
Устройство смонтировано между рольгангами 1 и 2 и включает приводной вал 3, на который с заданным шагом жестко насажены несущие рычаги 4, совершающие возвратно-поступательное движение. В пазах 5 несущих рычагов 4 шарнирно установлены передающие рычаги 6, которые снабжены выступами 7, ограничивающими поворот передающих рычагов.
На передающих рычагах смонтированы поводок 8 с роликом 9. Управление передающими рычагами смонтировано на основании 10, на котором шарнирно закреплен копир 11. Нижняя плоскость 12 копира 11 взаимодействуете копиром 13, ограничивая поворот последнего,
Для исключения возможного заклинивания устройства необходимо соблюсти следующую зависимость между основными размерами устройства (см, фиг, 2):
L-a l
мим
D 2
ме L - расстояние между осью вращения копира 11 и осью вала 3;
мин - минимальное расстояние между соями вала 3 и ролика 9;
D - диаметр ролика 9;
а - расстояние между осью вращения копира 11 и крайней правой плоскостью упора 13.
Устройство работает следующим образом,
Длинномерное изделие 14 поступает на рольганг 1. Устройство находится в исходном положении (см, фиг. 1). Включается привод (на фиг. не показан) и вал 3 вместе с несущими рычагами 4 начинает вращаться по часовой стрелке. При этом передающие
рычаги 6 некоторое время продолжают оставаться в вертикальном положении благодаря контргрузу, образованному выступами 7, поводку 8 и ролику 9. После
соприкосновения выступов 7 с боковой плоскостью А несущего рычага 4 передающий рычаг 6 берет на себя длинномерное изделие, снимает его с первой нитки рольганга 1 и передает на вторую нитку рольганга 2 (см.
фиг, 2 и 3), При этом копир под воздействием ролика 9 поворачивается в направлении против часовой стрелки (см. фиг, 2). После выхода ролика 9 из контакта с копиром 11 последний под действием собственного веса возвращается в исходное положение, опираясь на упор 13. После этого приводной вал 3 получает вращение против часовой стрелки, увлекая за собой несущие 4 и передающие 6 рычаги. Ролик 9 опускается на
поверхность Б копира 11 (см. фиг, 4) и, обкатываясь по нему, разворачивает передающий рычаг 6 так, чтобы его боковая поверхность Г не контактировала с очередным изделием 14, движущимся в этот момент по первой нитке рольганга (см. фиг. 4, 5), В положении несущего рычага 4, близком к крайнему, ролик 9 выходит из контакта с копиром 11 и передающий рычаг 6 под действием веса контргруза занимает вертикальное (исходное) положение (см. фиг. 1).
В дальнейшем все операции повторяются,
Изобретение позволяет повысить надежность в работе устройства для передачи
длинномерных изделий, а также исключить образование дефектов на наружной поверхности обрабатываемых изделий. Формула изобретения Устройство для передачи длинномерных изделий, включающее установленный на основании вал, жестко закрепленные на нем несущие рычаги возвратно-поступательного перемещения, шарнирно установленные на последних передающие рычаги с
ограничивающими поворот выступами и установленное на основании приспособление управления передающими рычагами, отличающееся тем, что, с целью повышения надежности в работе и производительности, оно снабжено смонтированным на передающих рычагах контргрузами, каждый из которых выполнен в виде поводка с роликом, а приспособление управления передающими рычагами выполнено 8 виде
копиров, установленных на основании шарнирно с возможностью взаимодействия с роликами передающих рычагов и упоров для ограничения поворота копиров.
.в 1 tf
1756246
7 Д 4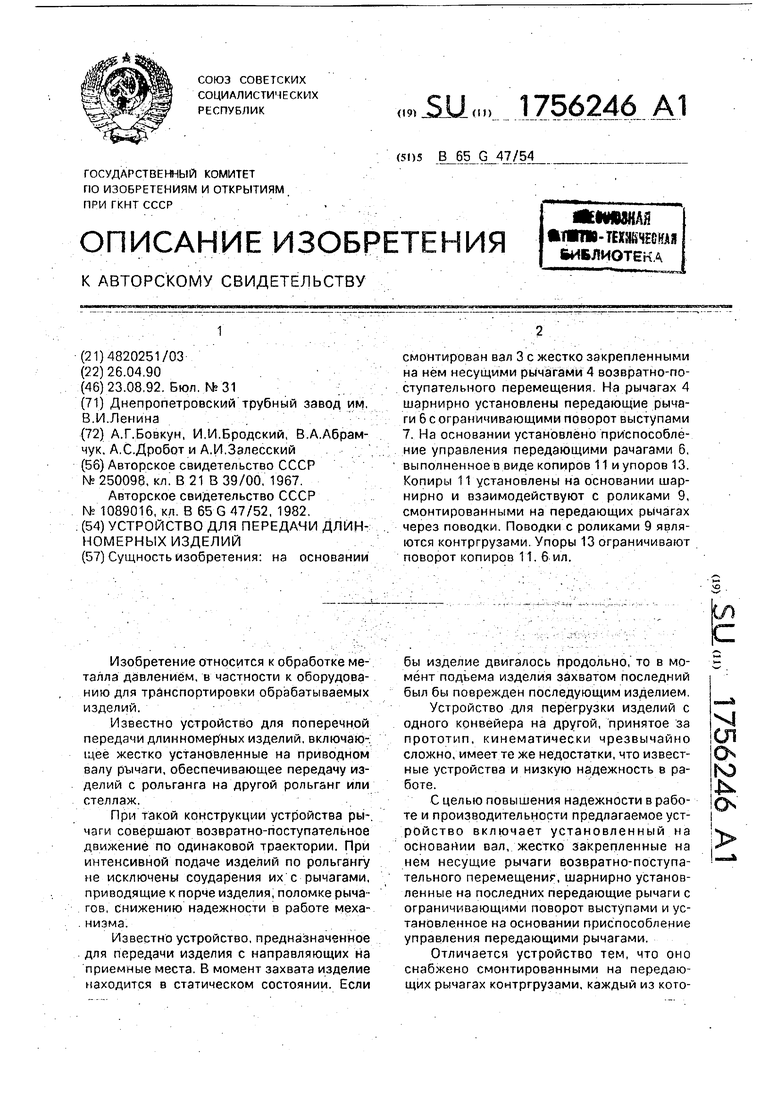
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема с рольганга и поперечной передачи длинномерных изделий | 1975 |
|
SU568488A1 |
| Эмалировочный полуавтомат | 1991 |
|
SU1799400A3 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Устройство для передачи штучных грузов к транспортно-складским конвейерам | 1990 |
|
SU1757974A1 |
| Устройство для удаления деталей из зоны обрабатывающей машины | 1986 |
|
SU1362576A1 |
| Устройство для поперечной передачи проката с рольганга | 1983 |
|
SU1103917A1 |
| Механизм поступательного перемещения и вращения длинномерного цилиндрического изделия | 1984 |
|
SU1146110A1 |
| Кантователь | 1976 |
|
SU599873A2 |
| Устройство для разрезания глиняного бруса | 1990 |
|
SU1705091A1 |
Сущность изобретения: на основании смонтирован вал 3 с жестко закрепленными на нем несущими рычагами 4 возвратно-поступательного перемещения На рычагах 4 шарнирно установлены передающие рычаги 6 с ограничивающими поворот выступами 7. На основании установлено приспособление управления передающими рачагами 6, выполненное в виде копиров 11 и упоров 13. Копиры 11 установлены на основании шарнирно и взаимодействуют с роликами 9, смонтированными на передающих рычагах через поводки Поводки с роликами 9 являются контргрузами Упоры 13 ограничивают поворот копиров 11. 6 ил.
&/.
/ 7
Г 6
ФигЗ
фигА
9 I /j
Фиг. 5
| УСТРОЙСТВО для ПЕРЕДАЧИ КРУГЛЫХ ШТАНГ | 0 |
|
SU250098A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
