Изобретение относится к автоматизации и механизации загрузки заготовок и может быть использовано при автоматизации процесса подачи заготовок в зону обработки.
Известен манипулятор содержащий основание м механическую руку 1.
Прототипом является манипулятор, содержащий основание, механические руки, установленные на колонне, имеющей на свободном конце зубчато-шлицевой венец, с помощью которого она размещена в шли- цевом отверстии втулки, установленной с помощью подшипников на основании, механизма подъема и поворота колонны, шар- нирно связанной с приводом подъема и посредством зубчатой рейки - с приводом поворота. Приводы выполнены в виде силовых цилиндров. Манипулятор снабжен подвижными и неподвижными упорами 2.
Недостатком известных манипуляторов является недостаточная точность позиционирования, наличие люфтов в кинематических целях. Целью изобретения является
устранение отмеченных недостатков и повышение точности позиционирования путем автоматической выборки люфтов в кинематических целях механизмов подъема и поворота колонны. Эта цель достигается тем, что манипулятор содержит основание, механическую руку, установленную на колонне, имеющей на свободном конце зубча- то-шлицевой венец, с помощью которого она размещена в шлицевом отверстии втулки, установленной с помощью подшипников на основании, механизмы подъема и поворота колонны, шарнирно связанной с приводом подъема и связанной посредством зубчатой рейки с приводом поворота, выполнение in в виде силовых цилиндров, а также подвижные и неподвижные упоры. Манипулятор снабжен пружинами, связанными соответственно со штоками силовых цилиндров, с зубчатой рейкой механизма поворота и с шарниром механизма подъема, при этом зубчатая рейка непосредственно кинематически связана С зубчато-шлицевым венцом колонны, подвижные упоры механизма по(Л
ворота размещены на зубчато-шлицевой втулке, а подвижные упоры механизма подъема - на колонне.
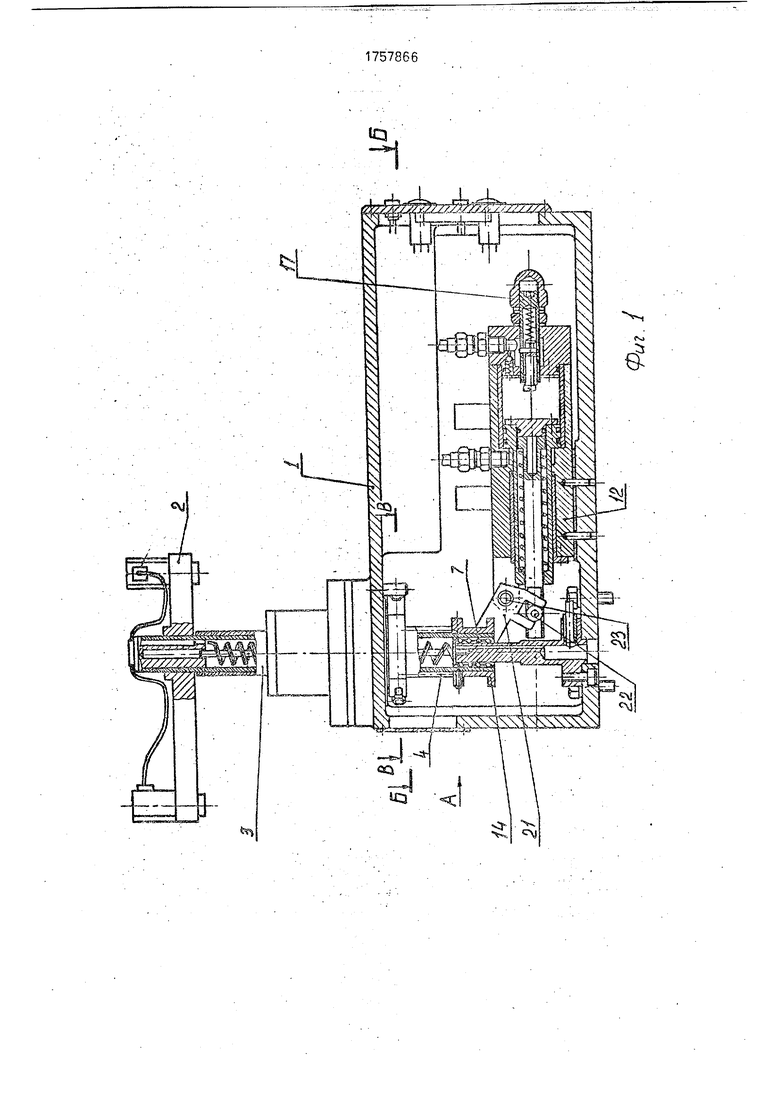
Изобретение поясняется чертежами: На фиг.1 изображен общий вид манипуля- тооа
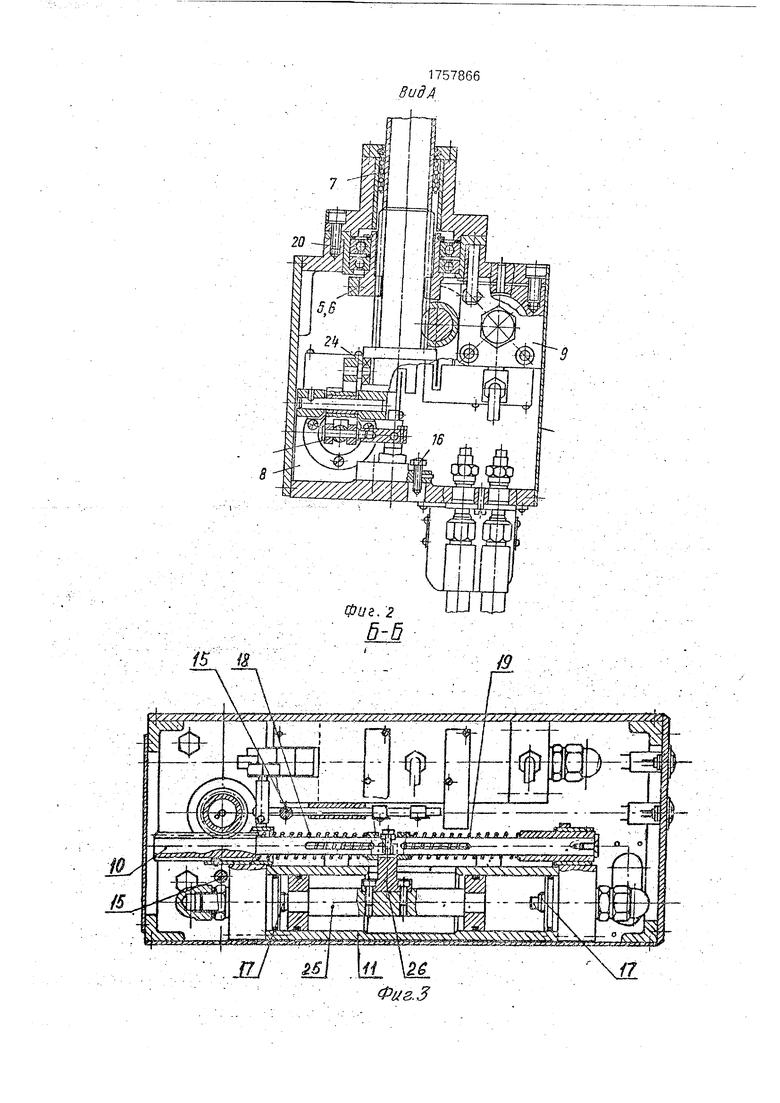
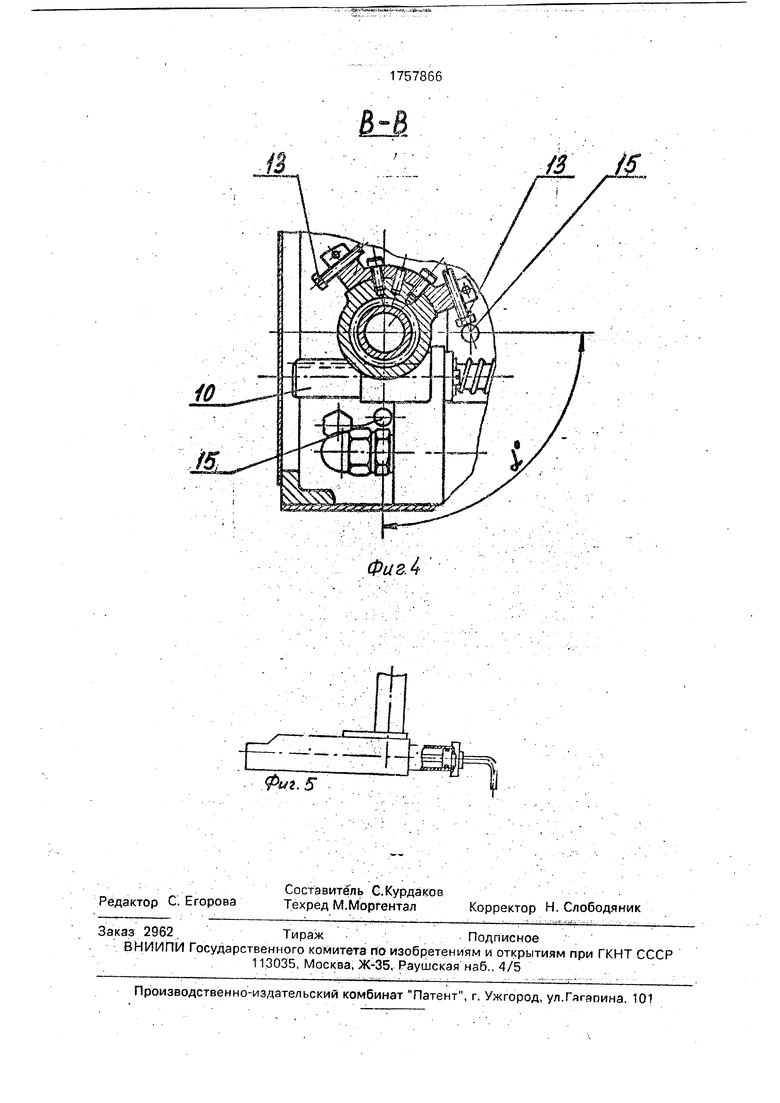
На фиг. 2 изображен вид А На фиг.З изображено сечение Б - Б На фиг.4 изображено сечение В - В / На фиг.5 изображен фрагмент манипулятора.
Манипулятор содержит основание , механическую руку 2, установленную на колонне 3, зубчато-шлицевой венец 4, втулку
5с зубчато-шлмцевым отверстием б подшипники 7, механизмы подъема 8 и поворота 9 колонны 3, включающий зубчатую рейку 10, привод поворота 11, привод подъема 12, подвижные упоры 13 и 14, неподвижные упоры 15, 16, 17, пружины 18 и 19.
Зубчато-шлицевой венец 4 размещен на свободном конце колонны 3. Колонна 3 размещена в зубчат о-шлицевом отверстии
6втулки 5. Втулка 5 установлена с помощью подшипников 20 на основании 1 Механизмы подъема 8 и поворота 9 колонны 3 связаны с приводом подъема шарнирно посредством двухплечего рычага 21 и шарниров 22, 23, 24 и с приводом поворота 11 посредством зубчатой рейки 10. Приводы подъема 12 и поворота 11 выполнены в виде силовых цилиндров. Зубчатая рейка 10 связана со штоком 25 привода поворота 11 посредством пружин 18, 19 и эилки 26 Зубчатая рейка 10 кинематически связана с зуб- чато-шлицевым венцом 4 колонны 3 Подвижные упоры механизма поворота размещены на зубчэто-шлицевой втулке 5 а подвижный упор 14 механизма подъема - на копонне 3.
Манипулятор работает следующим образом. При включении стайка сигнал поступает на включение в работу привода подъема 12, посредством которого рука 2
перемещается вдоль вертикальной оси манипулятора. Точное позиционирование руки осуществляется упором 16. Происходит захват заготовки. При поступлении сигнала нз привод поворота 11 руки, заготовка пе
размещается на заданную позицию При этом происходит поджим всех зубчатых зацеплений е одну сторону через пружины 18 и 19. Использование заявленного манипулятора повышает точность позиционирования
в пределах ±0,02 мм.
Формула изобретения Манипулятор, содержащий основание, механическую руку, установленную на колонне, имеющей на свободном конце зубчато-шлицевой венец, с помощью которого она размещена в шлицевом отверстии втулки, установленной с помощью подшипников на основании, механизмы подъема и поворота колонны, шарнирно связанной с приводом подъема и посредством зубчатой рейки с приводом поворота, выполненными в виде силовых цилиндров, а также подвижные и неподвижные упоры, отличаю щи й- с я тем, что, с целью повышения точности
позиционирования путем выборки люфтов в кинематических цепях механизма подъема и поворота колонны, он снабжен пружинами, связанными соответственно со штоками силовых цилиндров, с зубчатой рейкой механизма поворота и с шарниром механизма подъема, при этом зубчатая рейка непосредственно кинематически связана с зубча- то-шлицевым венцом колонны, подвижные упоры механизма поворота размещены на
шлицевой втулке, а подвижные упоры механизма подъема - на колонне
/ гпф
зГ

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1980 |
|
SU965761A1 |
| Манипулятор | 1988 |
|
SU1548033A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| Промышленный робот | 1980 |
|
SU876415A1 |
| БУРОВОЙ СТАНОК | 2021 |
|
RU2760657C1 |
| Манипулятор | 1986 |
|
SU1404328A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
Использование: для механизации и автоматизации технологических процессов подачи заготовок в зону обработки. Сущность: в кинематических цепях приэодов подвижных элементов имеются упругие элементы, за счет которых осуществляется постоянный поджим оси руки при позиционировании непосредственно к жестким упорам и компенсируются возникающие в сопряжениях зазоры. 5 ил.
ФигЗ
Фив.4
| Промышленный робот | 1980 |
|
SU965761A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
