(54) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1987 |
|
SU1426780A1 |
| Промышленный робот | 1986 |
|
SU1313689A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
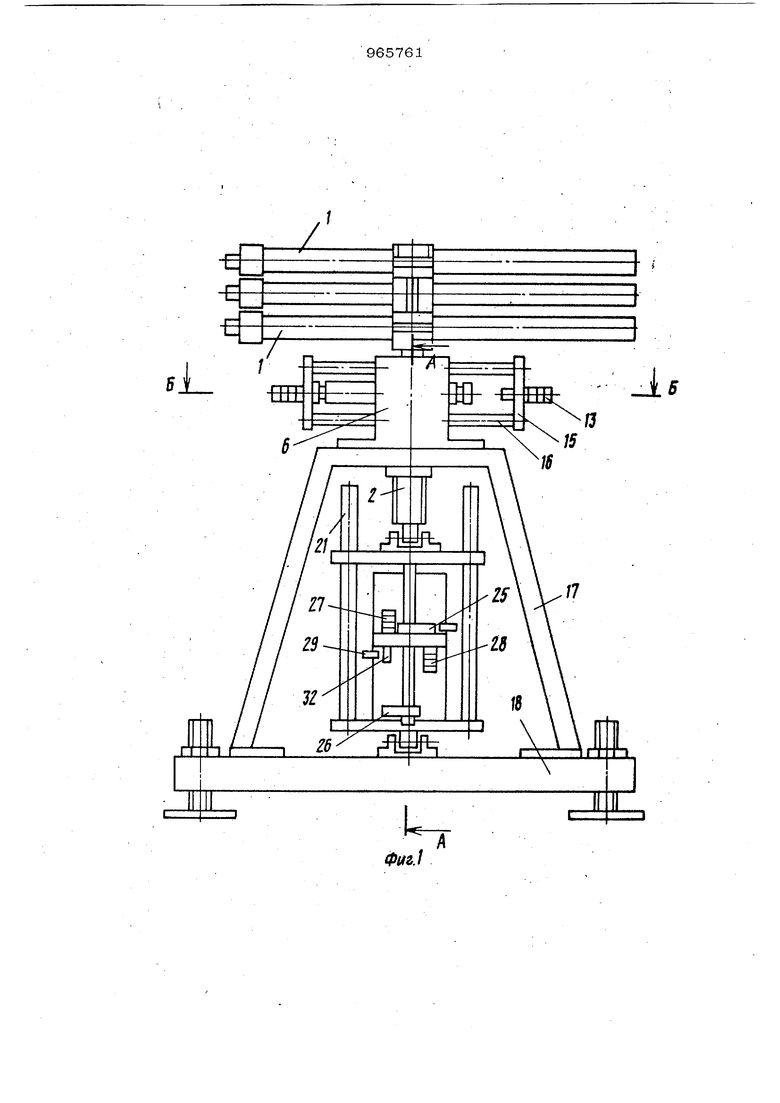
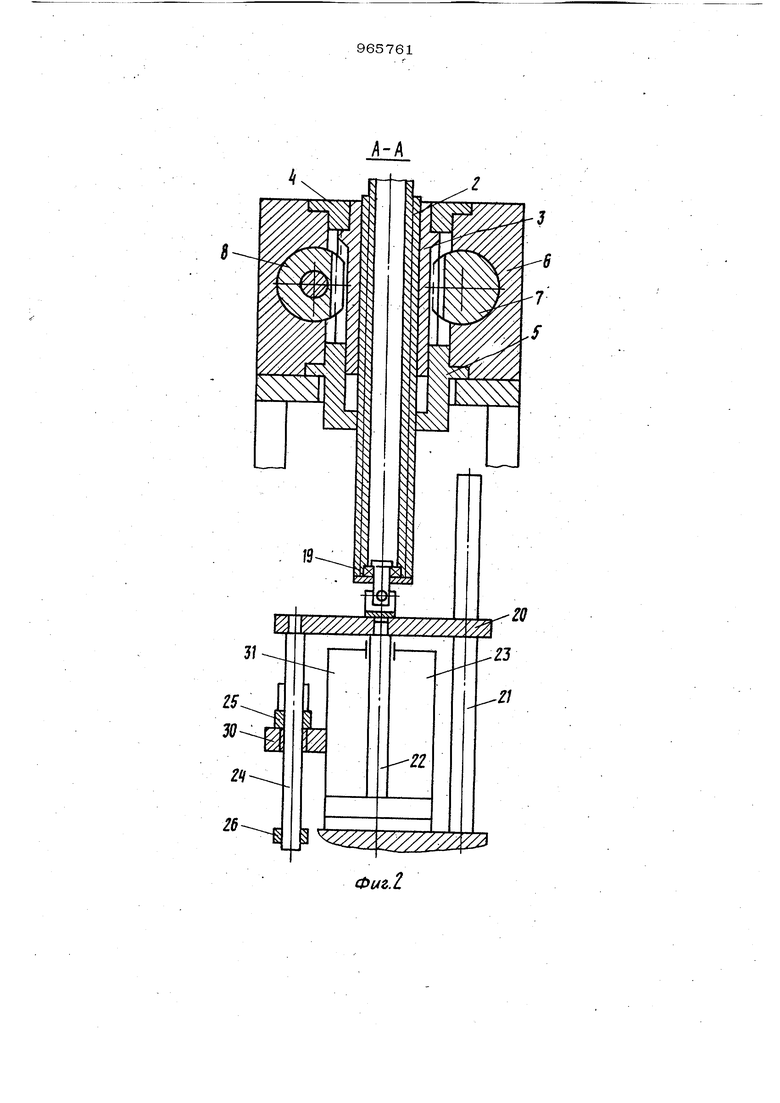
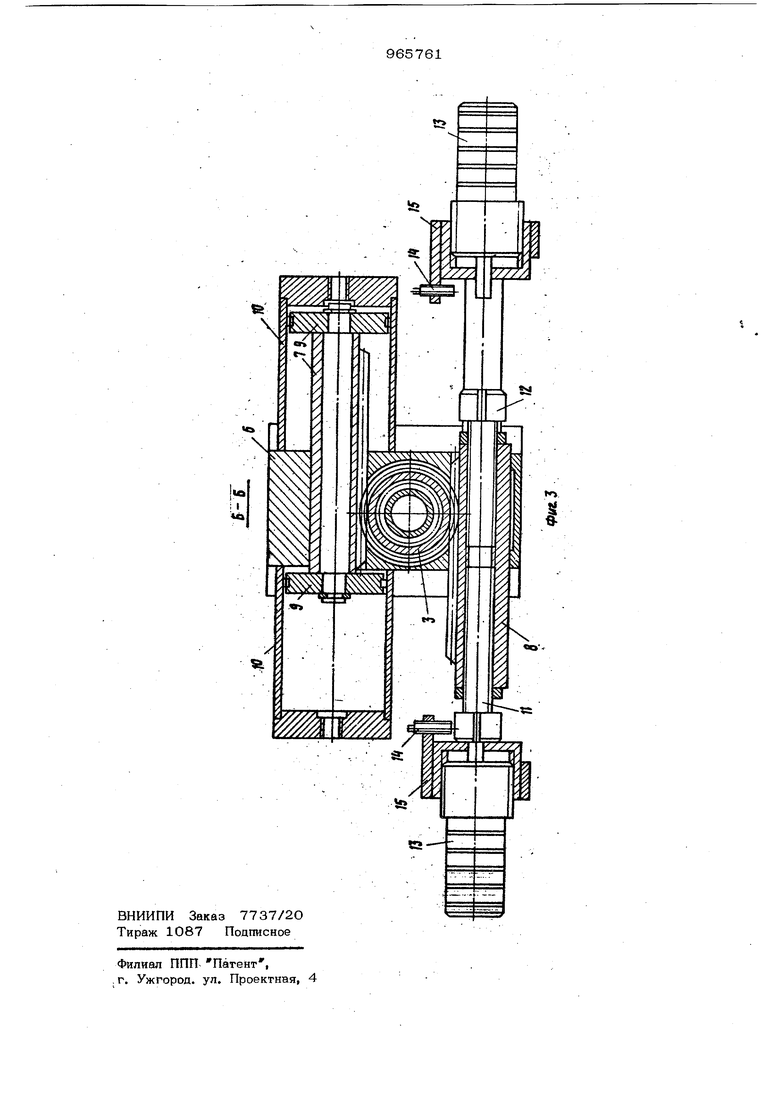
Изобретение относится к автоматизации и механизации загрузки и выгрузки заготовок в рабочую зону машины и может быть использовано в цехах листовой и объемной штамповки. Известен промышленный робот, содержащий механические руки, кинематически связанные с механизмами подъема и поворота t . Недостатком известного промышленного робота является сложность конструкци и низкая точность позиционирования. Цель изобретения - упрош:ение констру ции в технологическом смысле и повышение точности позиционирования. Цель достигается тем, что механизм . подъема промьплленного робота снабжен кареткой, связанной с механизмом подъема, а колонна установлена на каретке и выполнена в виде шлицевого вала, кинематически связанного с механизмом подъема. На фиг. 1 изображен промьпиленный робот; на фиг. 2 - разрез A-iA на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Промьпиленный робот состоит из рук 1, установленных на колойне 2, размещенной в шлидевом отверстии шестерни 3. Шестерня 3 установлена в подшипниках 4 и 5 корпуса 6 и связана с двумя зубчатыми рейками 7 и 8, одна из которых снабжена поршнями 9 и является штоком двухстороннего силового цилиндра поворота 10, в рейке 8, выполненной пустотелой, размещены регулируемые упоры 11 и 12, оси которых совмешены с рсяци гид- равлических демпферов 13 и перпендикулярны датчикам положейия 14. Гидравлические демпферы 13 и датчики положения 14 размешены на фланиах 15, связанных с корпусом 6 шпильками 16. Корпус 6 установлен на .тумбе 17, которая закреплена к основанию 18. Нижний-конец колонны 2 через упорный подшипник 19 и каретку 20, установленную в жестких направляющих 21, соединен со штоком 22 силового цилиндра подъема 23, установ ленного- на основании 18. С кареттсой 2О жестко связана штанга 24, несущая регулируемые упоры 25 и 26, установленные против гидравлических демпферов 27 и-28 и перпендикулярно датчику 29 положения, установленных на корпусе 30, закрепленном на гильзе 31 силового цилиндра подъема 23. Демпфер 27 имеет шток 32. Промышленный робот работает следующим образом, При подаче воздуха под правый поршень 9 силового цилиндра поворота 10 перемещается зубчатая рейка 7, которая через-шестерню 3 поворачивает колонну 2 Одновременна под действием шестерни 3 перемещается зубчатая рейка 8 с регулируемыми упорами 11 и 12. При подходе к фланцу 15, являющемуся жестким упором, упор 12 своим- торцом взаимодействует со штоком гидравлического демпфера 13, а боковой поверхностью с датчиком положения 14 и происходит гашение иНердиййных масс, участвующих в повороте и выдаче сигнала от датчика положения 14 в систему управления промышленным роботом. Поворот в противоположную сторону осуществляется аналогично подачей воздуха под левый поршень 9 силового цилиндра поворота 10. При подаче воздуха под поршень цилиндра подъема 23 каретка 20 по направляющим 21 поднимается и поднимает колонну 2, которая перемещается по шлицам шестерни 3. Одновременно с колонной 2 и кареткой 2О поднимается/ жестко связанная с ней штанга 24 с упорами 25 и 26. При подходе к корпусу ЗО упор 26 взаимодействует со щтоком 32 гидравлического демпфера 27, а боковой поверхностью с датчиком положения 29 и происходит гашение инерционных масс, участвующих в подъеме и выдаче сигнала от датчика 29 положения в систему управ ления промышленным роботом. Перемещение вниз осуществляется аналогично при подаче воздуха в другую полость силового цилиндра подъема 23. Величина угла поворота колонны 2 определяется положением регулируемых упоров 11 и 12 относительно зубчатой рейки 8, а величина вертикаль його перемещения колонны 2 положением упоров 25 и 26 на штанге 24. При изменении угла поворота или величин вертикального перемещения положение датчиков положения 14 и. 29 не изменяется, Предлагаемый промьплленный робот позволяет уменьшить инерционные массы механизма поворота, так как в повороте кроме рук и шестерни участвует только одна колонна, что позволяет повысить точность позилшонирования, повысить жесткость конструкции за счет уменьшения количества элементов до двух (шестерня и колонна), передающих крутящий момент и их ДЛИНУ) улучщить условия обслуживания и регулировки, так как свободен доступ к приводам подъема и поворота и осуществляются регулировки всех положений колонны; без изменения, положения датчиков, что уменьшает габариты, упрощает конструкцию. Формула изобрете.ния Промышленный робот, содержащий механические руки, установленные на колонне,, механизмы подъема и поворота и основание, отл, ичаюшийся тем, что, с целью повышения точности позицио нирования, он снабжен кареткой, связанной с механизмом подъема, а колонна установлена на каретке и выполнена в виде шлицевого вала, кинематически связанного с механизмом поворота. . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №529939, кл. В 25 Т 1/02, 1976.
Фиг2
