полнительный односторонний двухпорш™ невой цилиндр, на штоке которого смонтирована дополнительная рейка 16, Рейка 16 входит в зацепление со шлицами выходного элемента 6 пр1-тода подъема, обеспечивая выборку зазоров в зубчатом зйцеплен ш при повороте
выходного элемента б, которьш осуществляется посредством взаимодействия зубчатого сектора 12, закрепленного на выходном элементе 6, и зубчатой рейки 11, закрепленной на общем штоке одностороннего двухпоршневого цилиндра, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1757866A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Манипулятор | 1984 |
|
SU1288044A1 |
| Манипулятор | 1979 |
|
SU804171A1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Автооператор | 1987 |
|
SU1465249A1 |
| Двигатель поршневой поворотный | 1984 |
|
SU1335736A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |

Изобретение относится к машиностроению и может быть использовано в автоматических линиях и станках при создании различного рода манипуляторов к ним. Цель изобретения - повышение точности позиционирования захвата за счет уменьшения зазоров в зубчатом зацеплении. Это достигается тем, что манипулятор до(Л 4 О 4 Слд Ю 00 Фиг.)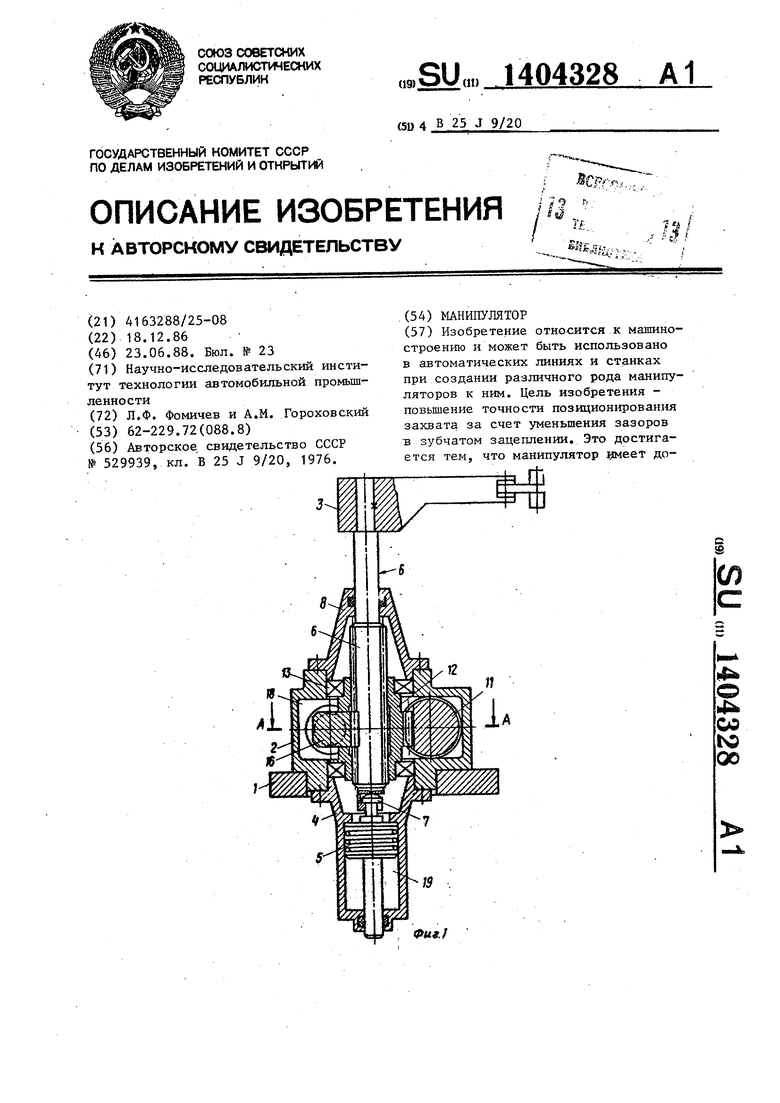
1
; Изобретение относится к машиностр |ению и может быть использовано в авт Ыатических линиях и станках при создании различного рода манипуляторов.:
Целью изобретения является повышение точности позиционирования ра |бочего органа за счет уг -геньшепия за- isopOB в зубчатом зацеплении, : На фиг, i показан манипулятор, разрезу на фиг, 2 сечение А-А на фиг, 1 .
Манипулятор содерзкит основание 1 с закрепленным на нем корпусом 2, в котором размещены привод поворота и подъема3 и механическую руку 3 с захватом.
Привод подъема состоит из саповог цилиндра 4j закрепленного на корпусе 2, причем поршень 5 которого связан с выходньп 1 элементом 6 посредством щарнирно-новоротного элемента 7, а выходной элемент 6 жестко связан с механической рукой 3 и установлен направляющем стакане 8, закрепленном В корпусе 2,
Привод поворота выполнен в виде двухпоршневого цилиндра, поршни 9 и 10 которого связаны мелсду собой общим штоком, на котором выполнена зубчатая рейка 11 зубчато-реечной переда- 1ш, Зубчатый элемент этой передачи Выполнен в виде зубчатого сектора 12, установленного в подшипникам 13 корпуса 2 и связанного с выходным элементом 6 привода подъема посредством шлицевого соединения. Кроме этого, манипулятор включает дополнительный двузспоршневой цилиндр с пор- 1анями 14 и 15, связанными общим штоком, на котором смонтирована.дополнительная рейка 16. При этом односторонние двухпоршневые цилиндры установлены паралельно друг другу с разных сторон выходного элемента 6, а
5
на .тьшьной . стороне зубчатого сектора 12 перпендикулярно оси выходиого элемента 6 привода подъема выполнена проточка 17 по,ц дополнительную зуб- 5 чат-ую.рейку 16 взаимодействующую
со шлицами выходного элемента 6 силового цилиндра привода подъема.
Полость 18 корпуса 2, в которой размещены зубчатый сектор 12, рейки
0 11 и 16 с поршнями 9 и 10, 14 и 15 соответственно является штоковой полостью ц шиндра 4 подъема; а полость 19 - поршневой полостью.
Манипулятор работает следующим образом.
При подаче давления в полости поршней 9 или 10 рейки 11 одновременно подается давление в полости поршней 14 или 15 соответственно
0 рейки 16.
Дополнительная рейка 16, находясь в зацеплении с шлицевым участком выходного элемента 6, при этом противодействует перемещению рейки 11, являясь одновременно демпфером для рейки 11„
Так как рейка 11 находится в заце- плении с зубьями сектора 12, а рей0 ка 16 - с зубьями выходного элемента 6, которые взаимодействуют с внутренними шлицевыми зубьями сектора 12, то при повороте механической руки 3 зазоры в зацеплениях полностью вы5 бираются и точность позиционирования захвата наивысшая.
Поршни 14 и 15 рейки 16 должны быть выполнены с диаметром, меньшим 0 нежели поршни 9 и 10 рейки 11, либо давление, подаваемое в полости поршней рейки 11S должно быть большим да- вления5 подаваемого в полости поршней рейки 16.
5
Формула изобретения
Манипулятор, содержащий основание, привод подъема в виде силового цилиндра, на выходном элементе которого установлена механическая рука с захва- том, и привод поворота в виде силового цилиндра и зубчато-реечной передачи, рейка которой смонтирована на его штоке, а зубчатьй элемент установлен на выходном элементе привода подъема, отличающийся тем; что, с целью повьшения точности позиционирования за счет выборки за- зоров в, зацеплениях, о.н снабжен дополнительным двухпоршневым силовым цилиндром и дополнительной зубчатой
рейкой, смонтированной на его штоке, а зубчатьй элемент привода поворота выполнен в виде зубчатого сектора, на тыльной стороне которого перпендикулярно оси выходного элемента привода подъема выполнена проточка под дополнительную зубчатую рейку, при этом на выходном элементе привода подъема выполнены шлицы, входящие в зацепление с дополнительной зубчатой рейкой, а силовой цилиндр привода поворота выполнен такж двухпоршневым, при этом двухпоршневы силовые цилиндры установлены параллельно друг другу с разных сторон выходного элемента силового цилиндра привода подъема.
К
.2
11
Ю
| Авторское, свидетельство СССР № 529939, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ,(54) МАНИПУЛЯТОР | |||
