(54) ПРОМЫШЛЕННЫЙ РОБОТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1979 |
|
SU821126A1 |
| Манипулятор | 1984 |
|
SU1288044A1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Промышленный робот | 1986 |
|
SU1360978A1 |
| Промышленный робот | 1977 |
|
SU808262A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Промышленный робот | 1988 |
|
SU1563965A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |

Изобретение относится к машиностроению, а именно к промышленным роботам.
Известен промышленный робот, содержащий механическую руку, колонну н основание с устройствамн поворота, подъема и возвратно-поступательных перемещений, выполненных в виде силовых цилиндров и зубчато-реечной передачи (IJ.
Недостатком известного робота являются сложность конструкции и громоздкость устройств основания робота.
Цель изобретения - упрощение конструкции и обеспечение компактности.
Указанная цель достигается тем, что промышленный робот снабжен платформой с направляющими, втулкой, смонтированной на платформе, гильзой, кинематически связанной с силовым цилиндром подъема, а основание выполнено в виде рамы с кронштейнами, на которой смонтированы направляющие, причем во втулке установлена колонна, внутри которой закреплена гильза, при-, том шток силового цилиндра поворота закреплен на платформе.
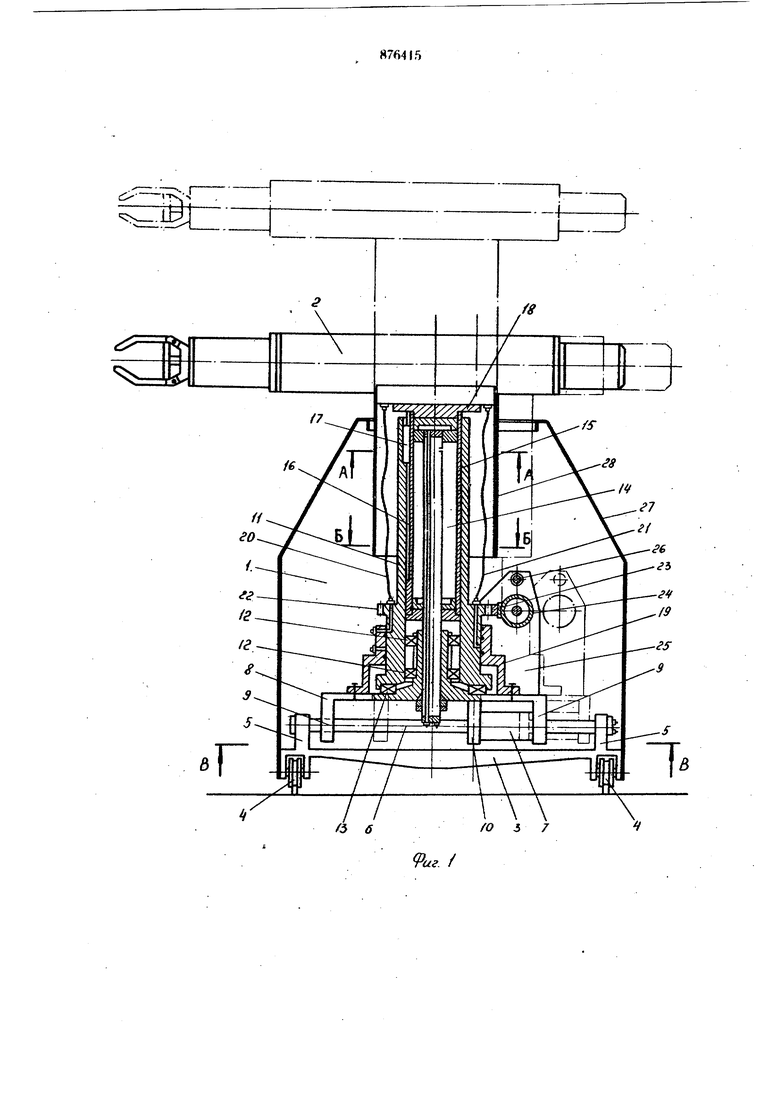
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - сеченне А-А на фиг. 1; на фиг. 3 - сеченне Б-Б .на
фиг. 1; на фиг. 4 -- сечение В-В на фиг. I. Промышленный робот состоит из основания I н механической руки 2, имеющей механизмы вращения, выдвижения руки, закрытия н раскрытия схвата. Основание I содержит раму 3, смонтированную на колесах 4. Сверху на раме 3 имеются кронштейны 5, в которых закреплены направляющие 6 н шток гидроцилиндра 7. На направляющих 6 с возможностью передвижения установлена платформа 8 с кронштейнами 9
10 и 10. К кронштейну 10 крепится гильза гидроцилнндра 7. На платформе 8 с возможностью вращения установлена колонна И на подшипниках 12 и 13. Внутрн колонны II смонтирован гидроцнлиНдр 14, на гильзе 15 которого -имеется шпоночный
5 паз 16, взаимодействующий со шпонкой 17, смонтированной внутри колонны И. К верхней части гильзы 15 гидроцилиндра 14 закреплен фланец 18, а к нему прикреплена механическая рука 2. Нижняя часть колонны 11 снабжена втулкой 19, служащей для
подвода рабочей жидкости к гндроцнлинд-. - рам механической руки 2. Рабочая жидкость к механической руке подводится через соответствующие каналы и проточки во втулке 19 и колонне II по гибким трубопроводам 20 и 21. Шток гидроцилиндра 14 закреплен на платформе 8 и служит для подвода через него жидкости в гидроцилиндр 14. На внешней стороне колонны 11 смонтирован механизм поворота, включающий зубчатый венец 22, который взаимодействует с установленной рейкой 23, расположенной на гильзе смонтированного 1гидроцилиндра 24. Шток гидроцилиндра 24 неподвижно закреплен на кронштейнах 25, установленных на платформе 8. Гильза гидроцилиндра 24 перемещается по направляющей 26, закрепленной на кронштейнах 25. Все механизмы, расположенные на основании 1, закрыты кожухом 27, а трубопроводы 20 и 21 - кожухом 28. Промышленный робот работает следующим образом. При подаче масла в бесштоковую полость гидроцилиндра 14 гильза 15 с прикрепленной на ней механической рукой 2 поднимается, при этом шпоночный паз 16, перемещается по шпонке 17 и предотвращает .м.еханическую руку от проворота относительно вертикальной оси. При подаче масла в штоковую полость гидроцилиндра 14 гильза 15 вместе с механической рукой опускается. При повороте колонны 11 относительно вертикальной оси подается масло в соответствующие полости гидроцилиндра 24, а его гилъза с укрепленной на ней рейкой 23 перемещается по направляющей 26. Рейка входит в зацепление с зубчатым венцом 22 и, перемещаясь, поворачивает его, а с ней и колонну 1 на определенный необходимый угол. Колонна 11, вращаясь в подшипниках 12 и 13, через шпонку 17 и шпоночный паз 16 передает вращение гильзе гидроцилиндра 14 и соответственно через фланец 18 механической руке 2. Подача масла к гидроцилиндрам механической руки 2 при вращении ее вокруг вертикальной оси и при подъеме производится через втулку 19, соответствующие проточки в каналах в ней и в колонне 11 и по трубопроводам 20 и 21. Перемещение колонны И с механической рукой 2 в горизонтальной плоскости производится при подаче масла в гидроцилиндр 7. Через шток соответственно в щтоковую или бесштоковую полости при этом гильза гидроцилиндра 7, прикрепленная к платформе 8, перемещает ее по направляющим 6 соответственно вправо или влево. Вместе с платформой 8 перемещается и колонна И с .механической рукой. Выполнение основания робота в виде перемещающейся рамы с направляющими и перемещаемой платформы, на которой смонтированы втулка с ycтaнoвлeннvJЙ подвижно колонной, снабженной снаружи механизмом поворота, а внутри - гильзой гидроцилиндра подъема и шпонкой с пазами, позволяет упростить конструкцию основания робота и обеспечить его компактность. Формула изобретения Промышленный робот, содержащий механическую руку, колонну и основание с устройствами поворота, подъема и возвратнопоступательных перемещений, выполненныхв виде силовых цилиндров и зубчато-реечной передачи, отличающийся тем, что, с целью упрощения конструкции f обеспечения компактности, он снабжен платформой с направляющими, втулкой, смонтированной на платформе, гильзой, кинематически связанной с силовым цилиндром подъема, а основание выполнено в виде рамы с кронштейнами, на которой смонтированы направляющие, причем во втулке установлена колонна, внутри которой закреплена гильза, притом шток силового цилиндра поворота закреплен на платформе. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 1Ю3712, кл. В 25 J 9/00, 1974.
9ueJ
