Изобретение относится к машиностроению, а именно к объемной отделочно-ззчи- стной обработке в контейнерах с планетарным вращением.
Известны устройство для центробежно- планетарной обработки, в которых обрабатываемые детали и шлифовальный материал загружают в контейнеры, смонтированные в гнездах водила планетарного механизма, посредством которого контейнерам сообщается планетарное движение.
Наиболее близким конструктивным решением из известных является устройство, содержащее контейнеры и водило, смонтированные на роторе. Ротор имеет возможность перемещаться таким образом, что водилу при этом сообщаются угловые перемещения вокруг оси, расположенной перпендикулярно оси водила. Загрузка контейнеров при этом получает дополнительное движение вдоль оси контейнера.
Недостатком устройства является отсутствие возможности реверсирования вращения контейнеров вокруг собственных осей относительно водила, т.к. реализуется только противоположное направление врз- щения контейнера и водила, что не позволяетэффективнообрабатыватьлегкодеформируемые детали вследствие интенсивного ударного воздействия частиц шлифовального материала на обрабатываемые поверхности и взаимного соударения деталей при движении в уплотненной нагрузке.
Цель изобретения - расширение тег- о- логических возможностей устройства путем сообщения контейнерам реверсивного вращения относительно водила.
Сущность изобретения заключается с том, что в устройстве для центробежной абразивной обработка, содержащем ротор с приводом его вращения, несущий приводное водило с планетарным механизмом при(Л
С
ы
4 О
k
пода контейнера, механизм привода выполнен в виде смонтированного на опорах в полости ротора шпинделя с рас г сложенным в нем приводным валом, кинематически связанным с валом водила, расположенным соосно с введенным в устройство полым валом, связанным с центральным колесом планетарного привода контейнеров, а шпиндель кинематически связан с полым валом, при этом устройство снабжено муфтой, выполненной в виде резьбовой втулкис внутренними коническими поверхностями, образующими две обоймы, в которых размещены шарики, причем муфта установлена с возможностью поочередного взаимодействия посредством шариков с приводным валом и шпинделем.
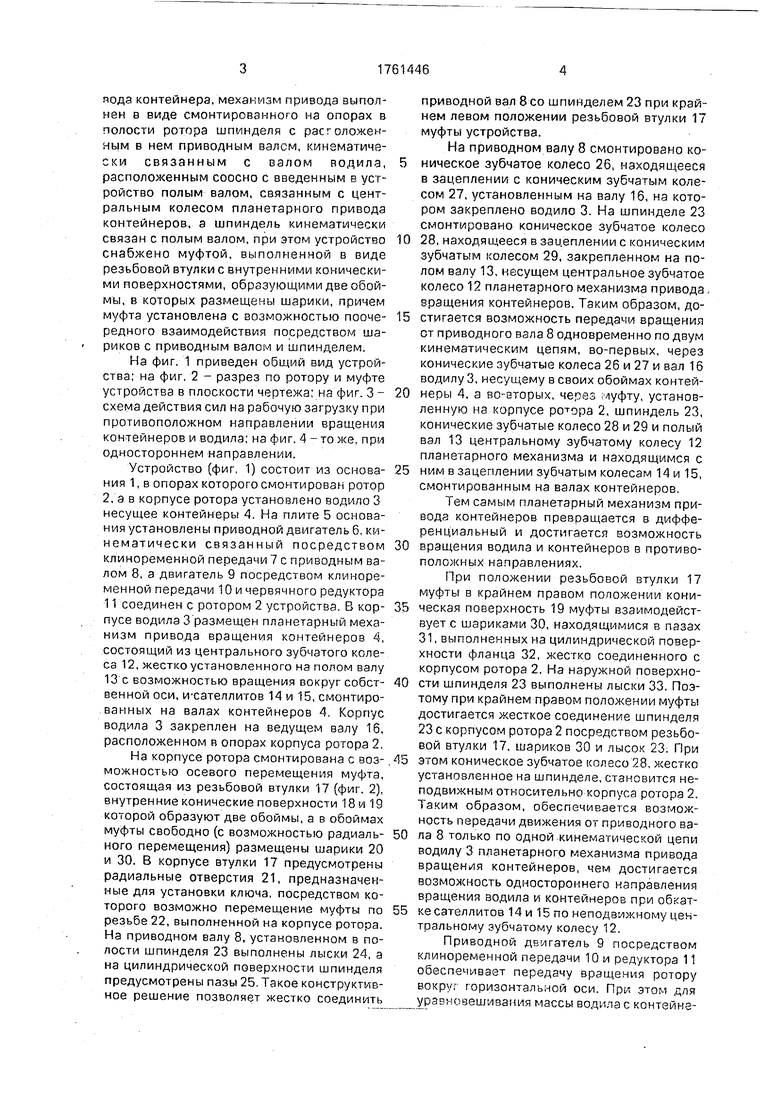
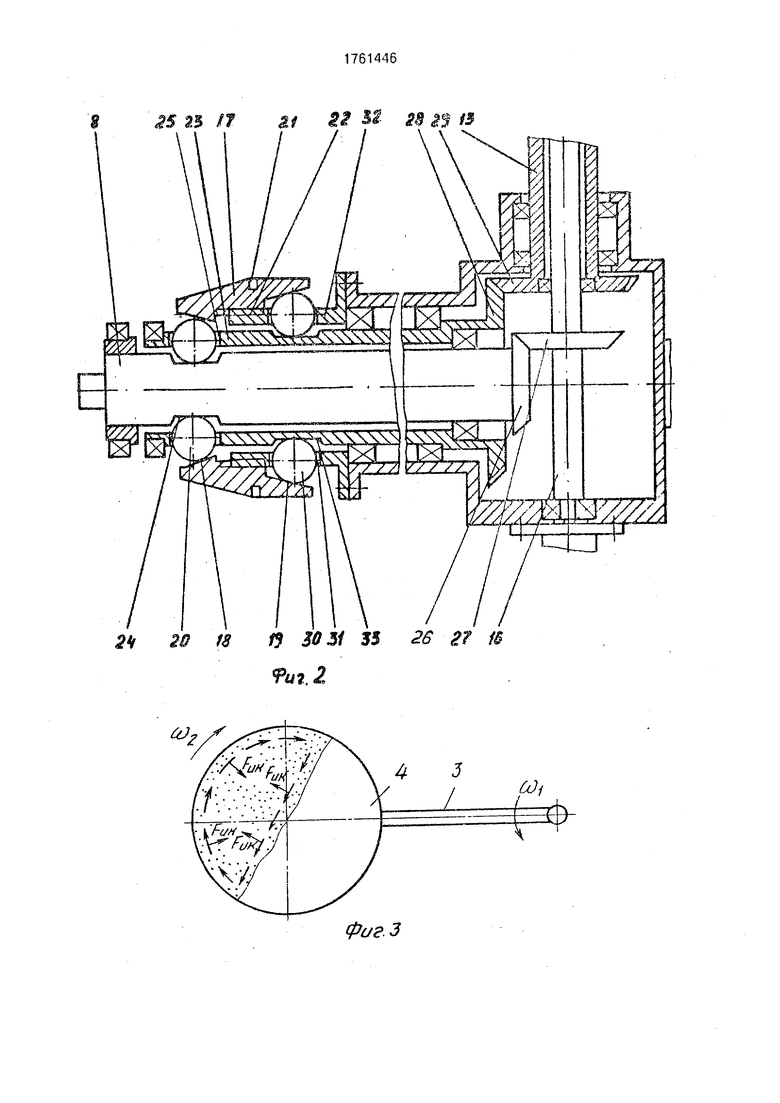
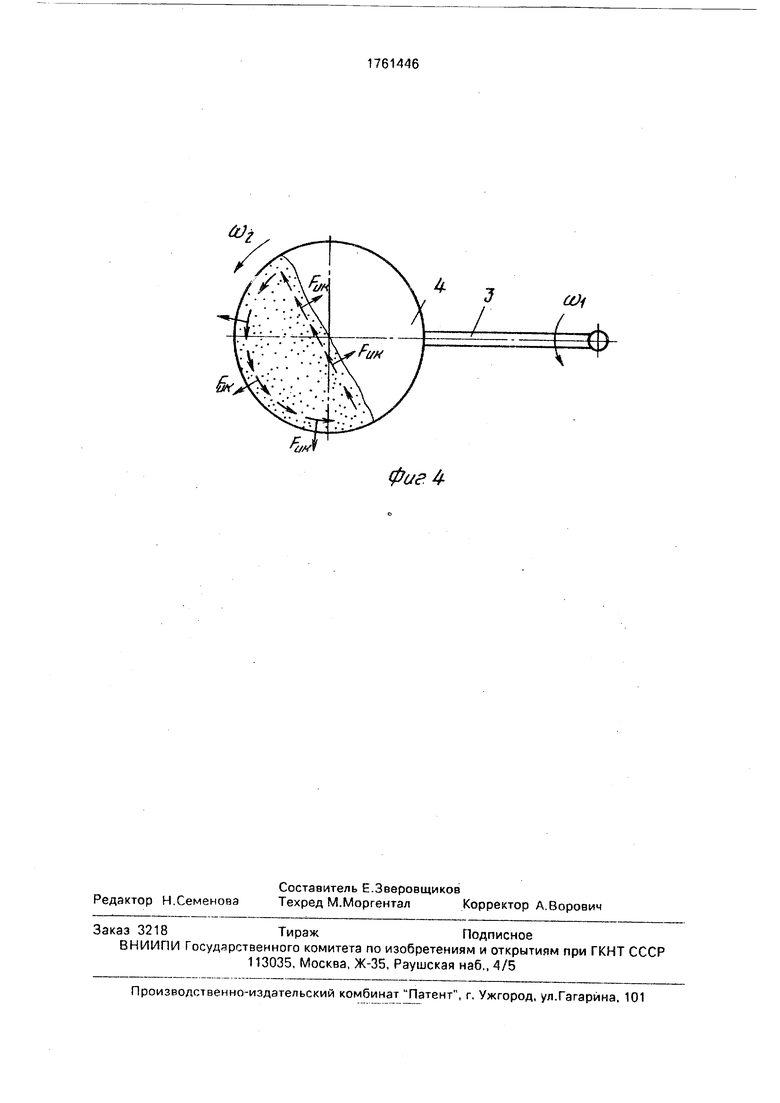
На фиг, 1 приведен общий вид устройства; на фиг. 2 - разрез по ротору и муфте устройства в плоскости чертежа; на фиг. 3 - схема действия сил на рабочую загрузку при противоположном направлении вращения контейнеров и водила; на фиг. 4 - то же, при одностороннем направлении.
Устройство (фиг. 1) состоит из основания 1, в опорах которого смонтирован ротор 2, а в корпусе ротора установлено водило 3 несущее контейнеры 4. На плите 5 основания установлены приводной двигатель 6, кинематически связанный посредством клиноременной передачи 7 с приводным валом 8, а двигатель 9 посредством клиноременной передачи 10 и червячного редуктора 11 соединен с ротором 2 устройства. В корпусе водила 3 размещен планетарный механизм привода вращения контейнеров 4, состоящий из центрального зубчатого колеса 12, жестко установленного на полом валу 13 с возможностью вращения вокруг собственной оси, и-сателлитов 14 и 15, смонтированных на валах контейнеров 4. Корпус водила 3 закреплен на ведущем валу 16, расположенном в опорах корпуса ротора 2. На корпусе ротора смонтирована с возможностью осевого перемещения муфта, состоящая из резьбовой втулки 17 (фиг. 2), внутренние конические поверхности 18 и 19 которой образуют две обоймы, а в обоймах муфты свободно (с возможностью радиального перемещения) размещены шарики 20 и 30. В корпусе втулки 17 предусмотрены радиальные отверстия 21, предназначенные для установки ключа, посредством которого возможно перемещение муфты по резьбе 22, выполненной на корпусе ротора. На приводном валу 8, установленном в полости шпинделя 23 выполнены лыски 24, а на цилиндрической поверхности шпинделя предусмотрены пазы 25. Такое конструктивное решение позволяет жестко соединить
приводной вал 8 со шпинделем 23 при крайнем левом положении резьбовой втулки 17 муфты устройства.
На приводном валу 8 смонтировано коническое зубчатое колесо 26, находящееся в зацеплении с коническим зубчатым колесом 27, установленным на валу 16, на котором закреплено водило 3. На шпинделе 23 смонтировано коническое зубчатое колесо
0 28, находящееся в зацеплении с коническим зубчатым колесом 29, закрепленном на полом валу 13, несущем центральное зубчатое колесо 12 планетарного механизма привода, вращения контейнеров. Таким образом, до5 стигается возможность передачи вращения от приводного вала 8 одновременно по двум кинематическим цепям, во-первых, через конические зубчатые колеса 26 и 27 и вал 16 водилу 3, несущему в своих обоймах контей0 неры 4, а во-вторых, через .уфту, установленную на корпусе ротора 2, шпиндель 23, конические зубчатые колесо 28 и 29 и полый вал 13 центральному зубчатому колесу 12 планетарного механизма и находящимся с
5 ним в зацеплении зубчатым колесам 14 и 15, смонтированным на валах контейнеров.
Тем самым планетарный механизм привода контейнеров превращается в дифференциальный и достигается возможность
0 вращения водила и контейнеров в противоположных направлениях.
При положении резьбовой втулки 17 муфты в крайнем правом попожении кони5 ческая поверхность 19 муфты взаимодействует с шариками 30, находящимися в пазах 31, выполненных на цилиндрической поверхности фланца 32, жестко соединенного с корпусом ротора 2. На наружной поверхно0 сти шпинделя 23 выполнены лыски 33. Поэтому при крайнем правом положении муфты достигается жесткое соединение шпинделя 23 с корпусом ротора 2 посредством резьбовой втулки 17, шариков 30 и лысок 23. При
5 этом коническое зубчатое колесо 28, жестко установленное на шпинделе, становится неподвижным относительно корпуса ротора 2. Таким образом, обеспечивается возможность передачи движения от приводного ва0 ла 8 только по одной кинематической цепи водилу 3 планетарного механизма привода вращения контейнеров, чем достигается возможность одностороннего направления вращения водила и контейнеров при обкат55 ке сателлитов 14 и 15 по неподвижному центральному зубчатому колесу 12.
Приводной двигатель 9 посредством клиноремечной передачи 10 и редуктора 11 обеспечивает передачу вращения ротору вокруг горизонтальной оси. При этом для уравновешивания массы водила с контейнерами предусмотрен противовес 34. закрепленный на корпусе ротора, Масса противовеса может регулироваться в зависимости от рабочей загрузки контейнеров. Вращающиеся чьст л устройства закрыты кожухами 35. Для достижения доступа к рабочим контейнерам предусмотрена откидная крышка 36.
Устройство работает следующим образом.
Обрабатываемые детали и шлифовальный материал загружаются в контейнеры 4. Б которые заливается технологическая жидкость и контейнеры герметично закрываются быстро съемными крышками. Закрывается откидная крышка 35 кожуха и включается приводной двигатель 6, передающий вращение через клиноремегиую передачу 7 приводному залу 8. От приводного вала 8 вращение передается водилу 3 и контейнерам 4 по разным кинематическим цепям в зависимости от положения муфты на корпусе ротора 2, Если муфта находится в крайнем правом положении (как показано на фиг. 2), то коническая поверхность 19 резьбовой втулки 17 утапливает шарики 30 в пазах 31 и плотно прижимает их к лыскам 33, выполненным на наружной поверхности шпинделя 23. При зтом шпиндель 23 оказывается жестко соединенным с корпусом ротора 2 и зубчатое колесо 28, установленное на шпинделе, оказывается также застопоренным относительно корпуса ротора. Таким образом, вращение не передается из зубчатое колесо 2S, полый вал 13 и центральное зубчатое колесо 12 привода планетарного механизма контейнеров. Поэтому вращение на контейнеры передается по одной кинематической цепи от приводного вала 8 зубчатым колесам 26 и 27, валу 16, несущему корпус водила 3. При вращении водила зубчатые колеса 14 и 15, установленные на валах контейнеров, обкатываются по неподвижному относительно водила зубчатому колесу 12 и контейнеры, совершая переносное вращение с водилом, получают вращение в ту же сторону, что и водило. Такой режим обработки является мягким, характеризуется меньшим уплотнением рабочей загрузки и рекомендуется для отде- лочно-зачистной обработки нежестких, легкодеформируемых деталей.
Для интенсивной обработки жестких деталей и при необходимости удаления значительного технологического припуску рекомендуетсяпротивоположноенаправление вращения контейнеров и водила, Это достигается переводом муфты на корпусе ротора 2 в крайнее левое положение. В этом случае от приводного вала 8
движение контейнерам 4 передается по двумя кинематическим цепям. Во-первых, шпинделю 23 посредством резьбовой втулки 17 муфты, шариков 20 и лысок 24, э о г 5 шпинделя вращение мередчетсч через зубчатые колеса 28 г, полому валу 13 и центральному зубчатому колесу 12, которое приводит во вращение вокруг собственных осей контейнеры 4 через зубчатые колеса 14 10 и 15,
Во-вторых, гфэщение от трубчатого колеса 26, установленного на приводном вэлу 8, передается зубчатому колесу 27, валу 16 и зодилу 3, которое переносит контейнеры 15 4. Таким образом, происходит суммирование движений, передаваемых по двум кинематическим цепям и планетарный механизм привода вращений контейнеров устройства трансформируется при помощи муфты уст- 0 ройствз в дифференциальный.
Передаточное отношение конической зубчатой передачи R зацеплении колес 28 и 29 подбирается таким образом, что при одинаковой частоте вращения приводного вала 5 8 во втором случае контейнеры будут вращаться относительно водила в противоположную сторону с той же скоростью, что и при одностороннем направлении вращения водила и контейнеров.
0Режим противоположного направления
вращения родила и контзйнеоое является значительно более жестким для обработки деталей, что обусловлено изменением направления кориолисовыхсил инерции, кото- 5 рые дополнительно уплотняют загрузку, и изменением характера взаимодействия рабочей загрузки со стенками контейнеров.
Схема действия сил на элементы рабочей загрузки и характер движения загрузки 0 при противоположном и одностороннем направлении вращения водила и контейнеров приведены на фиг. 3 и 4.
Дляустрангмия застойных зо.ч контейнера и повышенигг стабильности о-5- 5 работки деталей одилу 3 и контейнерам сообщают переносное вращение вокруг горизонтальной оси посредством ротора 2. Для этого с выдержкой 3...5 с, необходимой для уплотнения рабочей загрузки на пери- 0 ферии ксжтейнерог, включается поивог ой двигатель 9 и при помощи клпноременпой пере/дачи 10 и червгг-м;ого редуктора 11 ротору 2 с водилсм 3 1-. сснтейнер2ми 4, совер- шающими планет з оное движение, 5 сообщается вращг.н1,;, вокруг юриэонталь- ной оси. Для избежания дисбаланса вращающейся системы загруженные контейнеры устанавливаются противовесом 34.
По окончзни пронесся обработки реле времени отключает привод -: 5 и 9 устройст 5 -j Откидывается крышка 36 и толчковой попкой привода 9 контейнеры 4 переводятся в верхнее положение, снижаются оыстрс- съемные крышки и контейнеры переводился также толчковой кнопкой s нилнеэ положение, при котором рабочая загруска высыпается на сепарирующее устройство для разделения деталей и шлифовальною материала. Детали промываются и налоэзляют- ся на консервацию. Шлифоч&льир материал повторно используется для ODOS- ботки. Цикл обработки Гйтопрется. Формула и з о г э r e н к я Устройство для цен 1°с вжноЈ. ной обработки деталей, „одерж&щее ритор с приводом его вращени несущий приводное водило с планетарии меланиз оя пр/г вода контейнеров с рабочей загру/з.о/ с т -, и ч а чз ще есятем, что, с целью рзси.;лр°ни
технологических возможностей лутем сообщения контейнерам реверсивного spaaie- ния относительно водила, механизм контейнеров выполнен в виде смонтирсван- ного на опорах в полости ротора шпинделя с расположенным в нем приволь -. зало 1 ьематически связанным -, взлом родила, оэспслохенчым сооснс зо аведочиО л в уст- jjcficreo полом валу .связанное с еи гральHWW СЛеСС . ПЛсЖЭТЈф О.С| 01 ПОД
костейнеро, а гупин е-т
СНЯЗй1 С ПОЛММ в )М П|Ч,- CTOf-i V TOOHClCv
оичохент вь эл 1снпсй р вмле рэ эьбозой игу Лии с внутоен иг к.и лозерхкостлми, образующими две осой ivы, в которых рязмещены шарики, nDt:i.Cf- установлена с возможностью псюче- ре/ь0 0 чзг: действия посредстрэг LHC- О ч- оа с -itiM валом и шпинделем.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центробежной обработки колец | 1981 |
|
SU986747A2 |
| Устройство для центробежной абразивной обработки колец | 1980 |
|
SU929415A2 |
| Устройство для центробежной обработки поверхности деталей | 1980 |
|
SU878522A1 |
| Способ обработки деталей и устройство для его осуществления | 1988 |
|
SU1627382A1 |
| Способ центробежной абразивной обработки колец подшипников качения | 2019 |
|
RU2703065C1 |
| Способ центробежной абразивной обработки деталей и устройство для его осуществления | 1989 |
|
SU1705040A1 |
| Способ и устройство для отделочно-упрочняющей центробежной обработки поверхностей деталей | 2021 |
|
RU2782589C1 |
| Способ и устройство для центробежно-шпиндельной обработки поверхностей изделий | 2020 |
|
RU2755328C1 |
| Способ измельчения материалов в центробежной планетарной мельнице | 2020 |
|
RU2760394C1 |
| Способ камерной обработки свободным абразивом | 1990 |
|
SU1805012A1 |
Использование: в машиностроении, механообработке. Цель: повышение технологическихвозможностей центробежно-планетарных установок для объемной обработки. Сущность изобретения: устройство для объемной центробеж- но-планетарной обработки содержит ротор 2, водило 3 и контейнеры 4, снабжено шпинделем, приводным валом 8, полым валом 13 и шариковой муфтой, посредством которых осуществляется реверсирование направления вращения контейнеров 4 относительно водила 3. Предусмотрена возможность совмещения чистовой и черновой обработки на одной установке. 4 ил.
i-i-.fj-.r
- -j
ц. i ,
-iHt-irir i- i
.L, J
/
..i
i .,j i- -r -,
r1 - -J1 trx
i r-t-h
7
А
,
Z:
t
j
.L, J
i- i
1 trx
i r-t-h
v
СО
т чоэг
3
Ј-,
;Vфиг 4
| Авторское свидетельство СССР N5992172, кл | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
