Изобретение относится к технологическому оборудованию и может быть использовано в машиностроении.
Целью изобретения является повышение производительности за счет сокращения времени на переналадку при смене объектов производства.
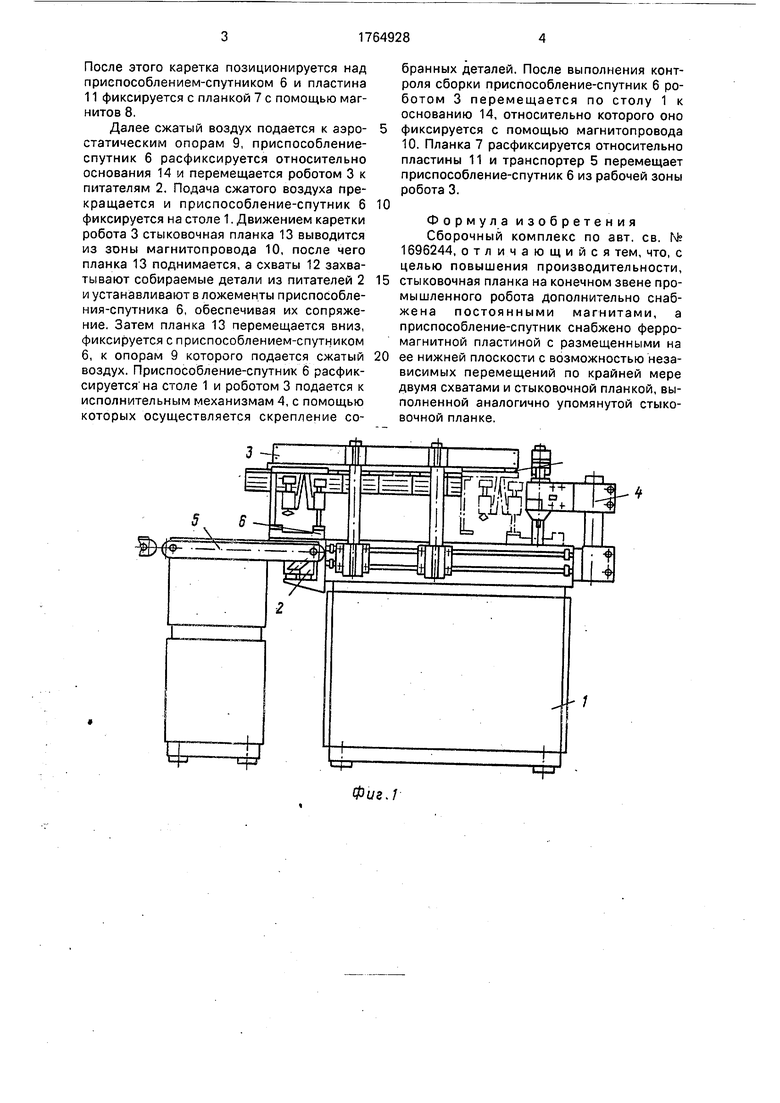
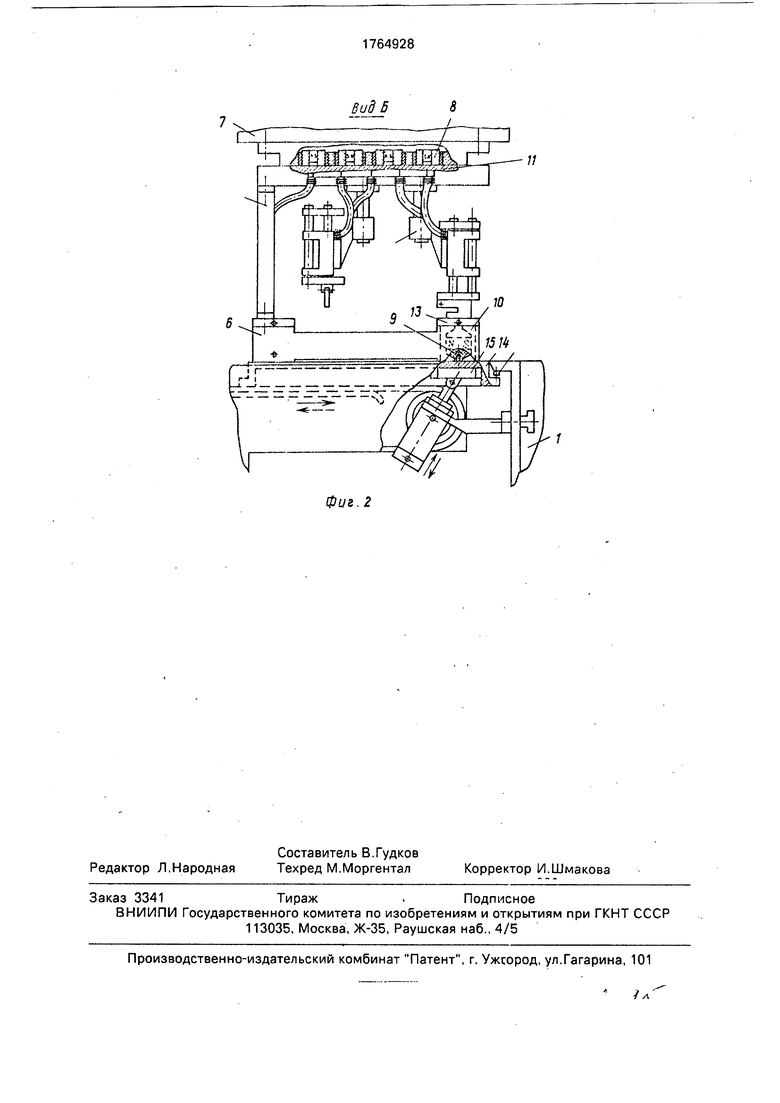
На фиг. 1 изображен сборочный комплекс, общий вид- на фиг 2 - приспособление-спутник.
Сборочный комплекс содержит стол 1, питатели 2, робот 3, силовые исполнительные механизмы 4 в виде пресса и винтовер- та, контрольное устройство в виде телекамеры, реверсивный транспортер 5 и приспособления-спутники 6.
Робот 3 имеет перемещающуюся в горизонтальной плоскости каретку со стыковочной планкой 7, снабженной постоянными магнитами 8. Приспособление-спутник 6 снабжено аэростатическими опорами 9, двухсторонним магнитопроводом 10 и ферромагнитной пластиной 11. На нижней плоскости пластины 11 размещены схваты 12 и стыковочная планка 13, имеющие возможность независимых рабочих перемещений. Транспортер 5 снабжен ферромагнитным основанием 14 под каждое приспособление-спутник б и фиксатором 15 с приводом.
Сборочный комплекс работает следующим образом.
С помощью транспортера 5 приспособление-спутник 6,установленное на основании 14, подается до упора в стол 1, Фиксатор 15 срабатывает и устанавливает основание 14 на одном уровне со столом 1.
XI
Ј
О ГО 00
ю
После этого каретка позиционируется над приспособлением-спутником 6 и пластина 11 фиксируется с планкой 7 с помощью магнитов 8.
Далее сжатый воздух подается к аэростатическим опорам 9, приспособление- спутник 6 расфиксируется относительно основания 14 и перемещается роботом 3 к питателям 2. Подача сжатого воздуха прекращается и приспособление-спутник 6 фиксируется на столе 1. Движением каретки робота 3 стыковочная планка 13 выводится из зоны магнитопровода 10, после чего планка 13 поднимается, а схваты 12 захватывают собираемые детали из питателей 2 и устанавливают в ложементы приспособления-спутника 6, обеспечивая их сопряжение. Затем планка 13 перемещается вниз, фиксируется с приспособлением-спутником 6, к опорам 9 которого подается сжатый воздух. Приспособление-спутник 6 расфиксируется на столе 1 и роботом 3 подается к исполнительным механизмам 4, с помощью которых осуществляется скрепление собранных деталей. После выполнения контроля сборки приспособление-спутник 6 роботом 3 перемещается по столу 1 к основанию 14, относительно которого оно фиксируется с помощью магнитопровода 10. Планка 7 расфиксируется относительно пластины 11 и транспортер 5 перемещает приспособление-спутник 6 из рабочей зоны робота 3.
Формула изобретения Сборочный комплекс по авт. св. № 1696244, отличающийся тем, что, с целью повышения производительности,
стыковочная планка на конечном звене промышленного робота дополнительно снабжена постоянными магнитами, а приспособление-спутник снабжено ферромагнитной пластиной с размещенными на
ее нижней плоскости с возможностью независимых перемещений по крайней мере двумя схватами и стыковочной планкой, выполненной аналогично упомянутой стыковочной планке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочный комплекс | 1985 |
|
SU1696244A1 |
| Устройство для сборки пакета магнитопровода с валом ротора | 1986 |
|
SU1534642A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Устройство для автоматической сборки | 1987 |
|
SU1764929A1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Устройство для резки пластин | 1986 |
|
SU1359139A1 |
| Устройство для передачи деталей между прессами | 1980 |
|
SU897351A1 |
| Устройство для передачи деталей между технологическими машинами | 1981 |
|
SU1003974A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ОБРЕЗИНЕННОГО КОРДНОГО ПОЛОТНА | 1990 |
|
SU1757185A1 |
Изобретение относится к машиностроению и позволяет повысить производительность за счет сокращения времени на переналадку при смене объектов производства. С помощью транспортера 5 приспособление-спутник 6 на основании 14 подается к столу 1, затем каретка робота позиционирует над приспособлением-спутником стыковочную планку 7, которая скрепляется с пластиной 11 с помощью магнитов 8. Далее сжатый воздух подается к аэродинамическим опорам 9, приспособление-спутник расфиксируется относительно основания 14 и перемещается по столу 1 к питателям. Подача сжатого воздуха к опорам 9 прекращается, приспособление-спутник 6 фиксируется на столе 1, планка 13 отводится из зоны действия магнитопрово- да 10, а схваты 12 устанавливают на приспособление-спутник собираемые детали. Затем планка 13 вновь стыкуется с приспособлением-спутником, робот 3 перемещает его последовательно к исполнительным механизмам и контрольному устройству, а затем возвращает на основание 14. 2 ил. s Ё
3
Цг
ф
Ш
о я
Фиг.1
Фиг. 2
Вид В
- 7/
| Сборочный комплекс | 1985 |
|
SU1696244A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
