Изобретение относится к технологическому оборудованию и может быть использовано в машиностроении.
Целью изобретения является расширение технологических возможностей за счет возможности одновременной подачи на сборочную позицию всего комплекта собираемых деталей различной формы.
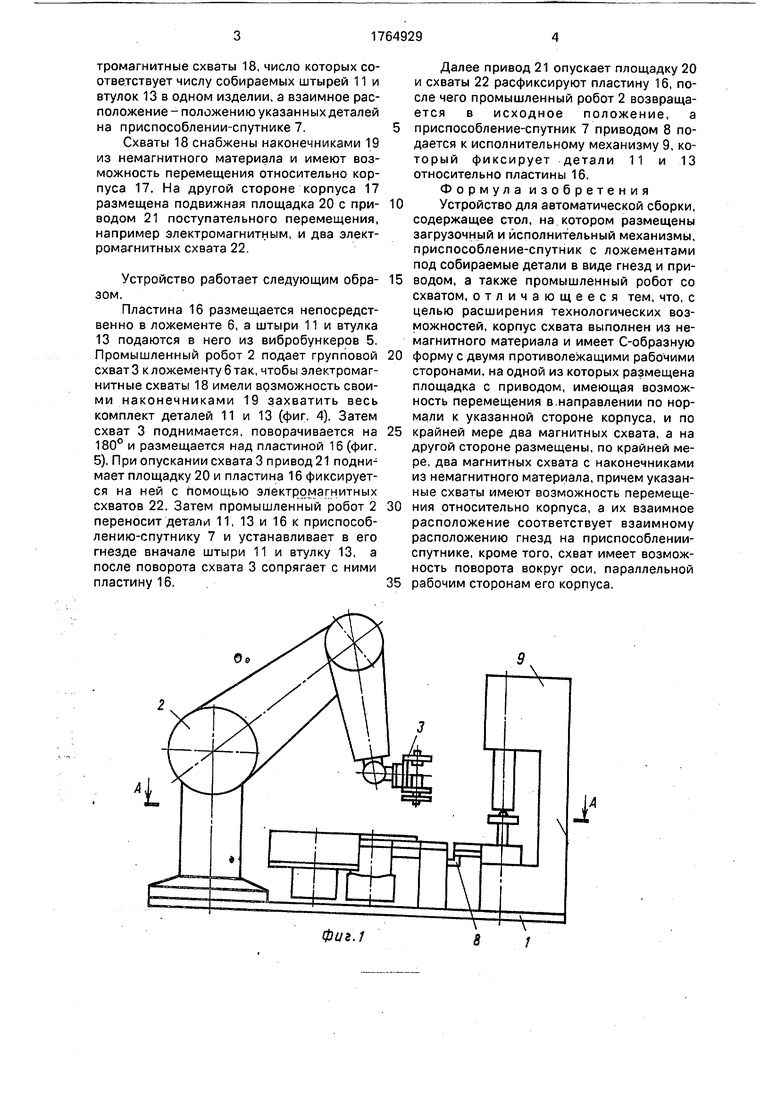
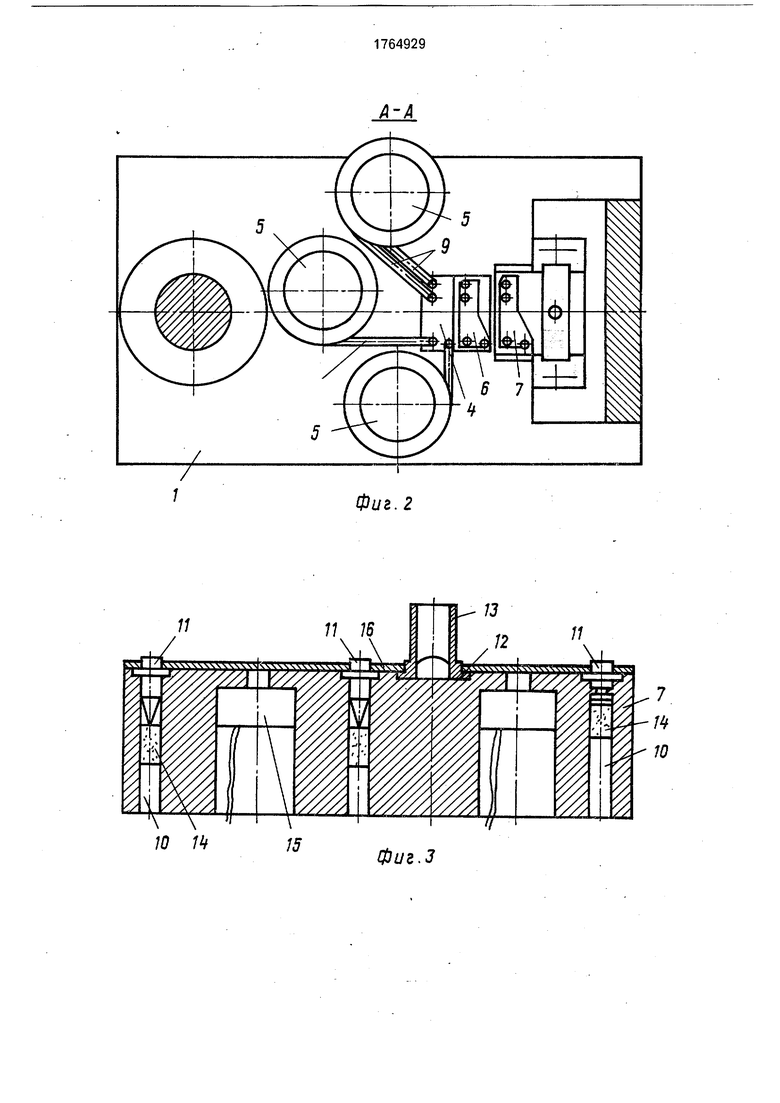
На фиг. 1 показано устройство, общий вид; на фиг. 2 - сечение А-А на фиг. 1; фиг. 3 - приспособление-спутник; фиг. 4 - групповой схват; фиг. 5 - то же в повернутом положении.
Устройство для автоматической сборки содержит стол 1, на котором размещены промышленный робот 2 с групповым схватом 3, механизм загрузки 4 с вибробункерами 5 и ложементом 6, приспособление-спутник 7 с приводом 8 и исполнительный механизм 9, например, в виде пресса.
Приспособление-спутник 7 содержит гнезда 10 для размещения собираемых деталей типа штырей 11 и гнездо 12 для размещения детали типа втулки 13. В нижней части гнезд 10 закреплены постоянные магниты 14, Электромагниты 15 размещены в приспособлении-спутнике 7 и служат для .фиксации собираемой детали-пластины 16.
Групповой схват 3 имеет возможность поворота на 180° и содержит С-образный корпус 17 из немагнитного материала, на одной из сторон которого размещены элекVJ
О
$ ®
тромагнитные схваты 18, число которых соответствует числу собираемых штырей 11 и втулок 13 в одном изделии, а взаимное расположение-положению указанных деталей на приспособлении-спутнике 7.
Схваты 18 снабжены наконечниками 19 из немагнитного материала и имеют возможность перемещения относительно корпуса 17. На другой стороне корпуса 17 размещена подвижная площадка 20 с при- водом 21 поступательного перемещения, например электромагнитным, и два электромагнитных схвата 22.
Устройство работает следующим обра- зом.
Пластина 16 размещается непосредственно в ложементе 6, а штыри 11 и втулка 13 подаются в него из вибробункеррв 5. Промышленный робот 2 подает групповой схватЗ к ложементу 6 так, чтобы электромагнитные схваты 18 имели возможность своими наконечниками 19 захватить весь комплект деталей 11 и 13 (фиг. 4). Затем схват 3 поднимается, поворачивается на 180° и размещается над пластиной 16 (фиг. 5). При опускании схвата 3 привод 21 поднимает площадку 20 и пластина 16 фиксируется на ней с помощью электромагнитных схватов 22. Затем промышленный робот 2 переносит детали 11, 13 и 16 к приспособлению-спутнику 7 и устанавливает в его гнезде вначале штыри 11 и втулку 13, а после поворота схвата 3 сопрягает с ними пластину 16.
Далее привод 21 опускает площадку 20 и схваты 22 расфиксируют пластину 16, после чего промышленный робот 2 возвращается в исходное положение, а приспособление-спутник 7 приводом 8 подается к исполнительному механизму 9, который фиксирует детали 11 и 13 относительно пластины 16.
Формула изобретения Устройство для автоматической сборки, содержащее стол, на котором размещены загрузочный и исполнительный механизмы, приспособление-спутник с ложементами под собираемые детали в виде гнезд и приводом, а также промышленный робот со схватом, отличающееся тем, что, с целью расширения технологических возможностей, корпус схвата выполнен из немагнитного материала и имеет С-образную форму с двумя противолежащими рабочими сторонами, на одной из которых размещена площадка с приводом, имеющая возможность перемещения в.направлении по нормали к указанной стороне корпуса, и по крайней мере два магнитных схвата, а на другой стороне размещены, по крайней мере, два магнитных схвата с наконечниками из немагнитного материала, причем указанные схваты имеют возможность перемещения относительно корпуса, а их взаимное расположение соответствует взаимному расположению гнезд на приспособлении- спутнике, кроме того, схват имеет возможность поворота вокруг оси, параллельной рабочим сторонам его корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочный комплекс | 1987 |
|
SU1764928A1 |
| Автоматический сборочный комплекс | 1987 |
|
SU1521545A1 |
| Автомат для сборки деталей | 1984 |
|
SU1234151A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| СПОСОБ МНОГОМЕСТНОЙ ИМПУЛЬСНОЙ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ ЛОПАТОК В СОСТАВЕ РОБОТИЗИРОВАННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2590743C1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Устройство для группового набора ферромагнитных удлиненных деталей | 1979 |
|
SU770936A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Устройство для сборки деталей | 1983 |
|
SU1224131A1 |
| Загрузочное устройство | 1985 |
|
SU1301630A1 |

Изобретение относится к машиностроению и позволяет расширить технологические возможности за счет возможности одновременной подачи на сборочную позицию всего комплекта собираемых деталей различной формы. После подачи собираемых деталей в ложемент б загрузочного механизма промышленный робот опускает групповой схват 3 так, чтобы магнитные схваты 18 имели возможность своими нако- нечн иками 19 захватить весь комплект деталей типа штырей и втулок. Затем схват поднимается, поворачивается на 180° и опускается вновь на ложемент 6. При этом привод 21 поднимает площадку 20 и деталь типа пластины фиксируется относительно площадки 20 с.помощью магнитных схватов 22, Далее промышленный робот переносит весь комплект собираемых деталей к приспособлению-спутнику, в ложемент которого егначал ё устанавливаются штйри и втулка, а затем - пластина. После этого приспособление-спутник перемещается к исполнительному механизму, с помощью которого осуществляется взаимная фиксация собранных деталей.5 ил.
О
Фиг.}
11
Фиг. 2
13
11
Фиг.З
ич -
| Сборочный комплекс | 1985 |
|
SU1696244A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
