1
(21)4081650/07 (22) 18.04.86 (46)07.10.92. Бюл. №37
(71)Белорусский государственный университет им. В.И.Ленина
(72)И.М.Чушенков
(56)1. Авторское свидетельство СССР i № 1176425,кл. Н 02 К 29/06. 1984.
2, Авторское свидетельство СССР № 1257690, кл. Н 02 К 29/06, 1984.
(54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ВАЛА
(57)Изобретение относится к электротехнике и может быть использовано в следящих системах двустороннего действия. Целью изобретения является расширение функциональных возможностей за счет обеспечения как автоматического слежения за углом поворота, так и фиксации этого угла на заданном уровне. Указанная цель достигается тем, что в устройство для дистанционной передачи угла поворота вала введены компаратор, синхронный IK-триггер, логический элемент И-НЕ. Введение указанных элементов обеспечивает фиксацию положений валов задающей и исполнительной синхронных машин, плавное их включение в работу после окончания фиксации, т.к. их подключение осуществляется лишь после увеличения противодействующего момента до размера, необходимого для полной компенсации задающей синхронной машины. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
Изобретение относится к электротехнике и может быть использовано в следящих системах двустороннего действия с вентильными двигателями и силомоментным очувствлением.
Целью изобретения является расширение функциональных возможностей за счет обеспечения как автоматического слежения за углом поворота, так и фиксации этого угла на заданном уровне.
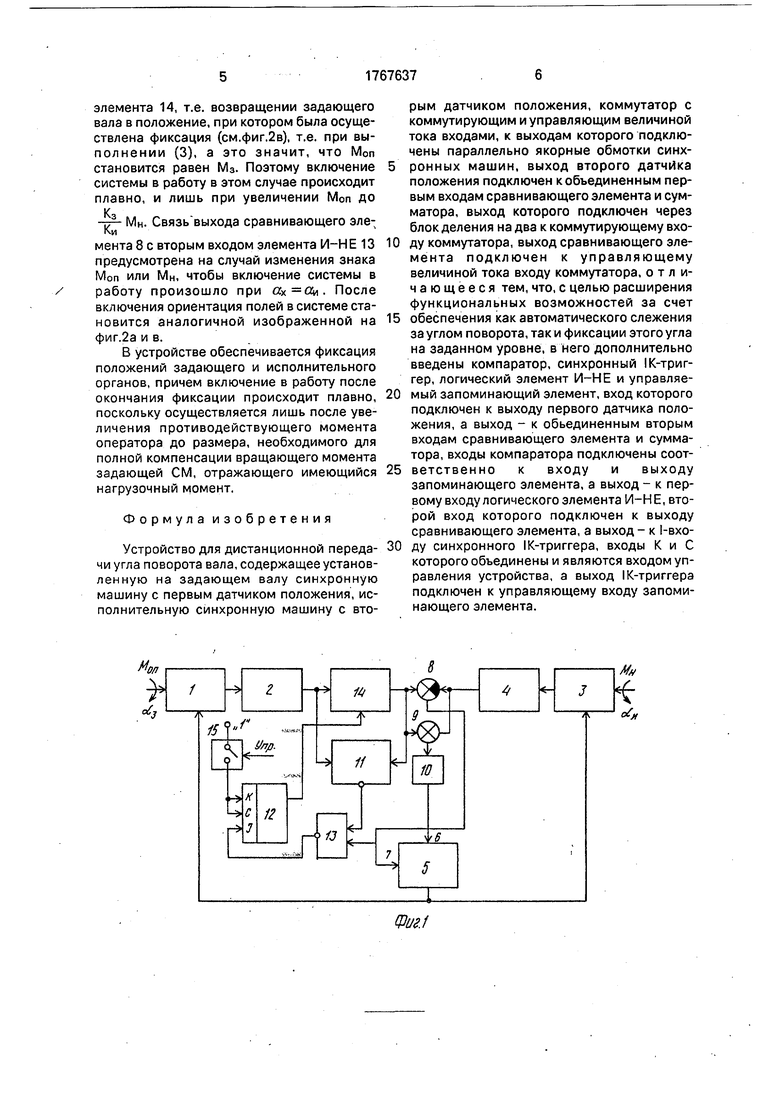
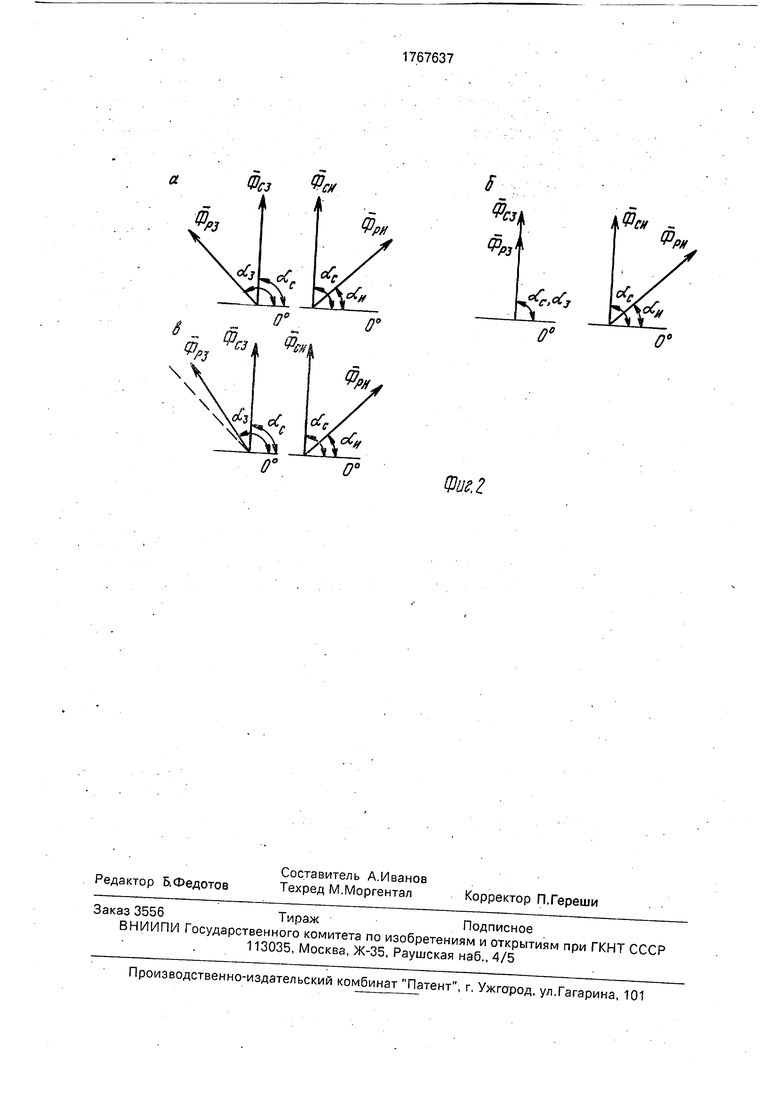
На фиг.1 изображена функциональная схема устройства дистанционной передачи угла поворота вала; на фиг.2 - векторные диаграммы магнитных полей синхронных машин.
На чертежах и в тексте приняты следующие условные обозначения:
«з, а/л , Ос - углы поворота задающего, исполнительного валов и угловая ориенСО
С
тация статорных полей синхронных машин (СМ);
Аа -Југол между магнитными полями
роторов и статоров СМ;
Мои, Мн - моменты оператора и нагрузки, действующие на задающий и исполнительный валы;
М3, Ми - вращающие моменты задающей исполнительной СМ;
Фрз, Фри, Фсз, Феи - магнитные потоки роторов и статоров задающей и исполнительной СМ.
Устройство дистанционной передачи угла поворота вала содержит установленную на задающему валу синхронную машину 1 с первым датчиком 2 положения, исполнительную синхронную машину 3 с вторым датчиком 4 положения, коммутатор 5 с коммутирующим 6 и управляющим величиной
Ч| о vj
Оч
со VJ
тока 7 входами, к выходам которого подключены параллельно якорные обмотки синхронных машин 1 и 2. Выход второго датчика 4 положения подключен к объединенным первым входам сравнивающего элемента 8 и сумматора 9, выход которого подключен через блок 10 деления на два к коммутирующему входу 6 коммутатора 5. Выход срав- нивающегр элемента 8 подключен к управляющему величиной тока входу 7 ком- мутатора 5. Кроме того, устройство дистанционной передачи угла поворота вала содержит компаратор 11, синхронный IK- триггер 12, логический элёмент И-НЕ 13 и управляемый запоминающий элемент 14, вход которого подключен к выходу первого датчика 2 положения, а выход - к объединенным вторым входам сравнивающего элемента 8 и сумматора 9. Входы компаратора 11 подключены соответственно к входу и выходу запоминающего элемента 14, а выход - к первому входу логического элемента И-НЕ 13, второй вход которого под- ключей к выходу сравнивающего элемента 8, а выход - к 1-входу синхронного 1К-триг- гера 12,входы К и С которого объединены и являются входом управления устройства дистанционной передачи угла поворота вала. Выход IK-триггера подключен к управляющему входу запоминающего элемента 14,
Устройство дистанционной передачи угла поворота вала работает следующим образом.
При разомкнутом ключе 15 и единице на выходе IK-триггера 12 запоминающий эле- мент 14 работает в режиме повторителя входного сигнала, при этом ориентация ста- торного поля совпадает со средним арифметическим углом поворота валов.
,-v - з -ЬОи/,.
«с о0)
а амплитуда его пропорциональна рассогласованию валов (см. фиг, 2а), Для вращаю- 45 щих моментов СМ можно записать:
М3 К3 Да sin
Да
МИ -КИ Да sin-2,
где К3, Ки - коэффициенты, определяемые конструкциями СМ; а До; аэ - #и .55
Из (2) видна обратимость устройства по усилию, поскольку отношение Ми к М3 всегда постоянно. Если в начальном положении при Да - 0 прикладывают, например, к
задающему валу М0п, это вызывает поворот Фрз в сторону действия этого момента и появление Да О . При этом по (2) появляются М3 и Ми и система приходит в движение до тех пор, пока не будет выполнено соотношение
Кз Ки
Кн.
(3)
5 10 15 20/25 30
35 40
45
50
55
д Л
При ЭТОМ УГЛЫ (Фрз Фсз) И (Фри, Феи)
всегда одинаковы, как видно из (1). Если Мн изменяет направление, Да уменьшается до нуля, а затем меняет знак, что приводит к изменению направления Ми и М3. Таким образом, устройство обладает обратимостью по положению и усилию.
При необходимости фиксации положения оператор замыкает ключ 15. При этом на К-вход IK-триггера 12 поступает логическая единица и устанавливает нуль на его выходе. Одновременно единица поступает на С- вход IK-триггера 12, что не мешает его установке в нуль, но запрещает дальнейшие переключения на все время замыкания ключа 15. В момент переключения в силу работы запоминающего элемента 14 в режиме повторителя сигналы на входах компаратора 11 одинаковы, на его выходе-нуль, а на I- входе триггера 12, следовательно, единица. Однако триггер 12 устанавливается в нуль, т.к. при двух единицах на входах IK-триггер инвертирует предыдущее состояние.
Так как на управляющем входе запоминающего элемента 14 появляется нуль, он переходит в режим хранения информации, а следовательно, сигналы на первых входах сравнивающего элемента 8 и сумматора 9 остаются неизменными в течение всего времени замыкания ключа 15, Поэтому при неизменном Мн ориентация и амплитуды Фсз, Феи остаются неизменными, т.е. Ои постоянен, т.е. исполнительный вал фиксируется. Задающий же вал повора- чивается до совпадения Фрз с Фсз (при Моп 0, т.е., если оператор не прикладывает усилий к задающему валу). После этого положения валов фиксируются, если Мн const, в противном случае Ос изменяется до выполнения (3) на небольшой угол (см. фиг.2б).
При размыкании ключа 15 на С-входе IK-триггера 12 вновь появляется нуль, разрешая его переключение. Однако оно происходит лишь при появлении единицы на его l-входе, т.е. при появлении нуля на одном из входов элемента И-НЕ 13. На первом его входе нуль появляется при равенстве сигналов на входе и выходе запоминающего
элемента 14, т.е. возвращении задающего вала в положение, при котором была осуществлена фиксация (см.фиг.2в), т.е. при выполнении (3), а это значит, что М0п становится равен М3. Поэтому включение 5 системы в работу в этом случае происходит
плавно, и лишь при увеличении М0п до I/
Мн. Связь выхода сравнивающего
мента 8 с вторым входом элемента И-НЕ 13 Ю предусмотрена на случай изменения знака Моп или Мн, чтобы включение системы в работу произошло при . После включения ориентация полей в системе становится аналогичной изображенной на 15 фиг.2а и в.
В устройстве обеспечивается фиксация положений задающего и исполнительного органов, причем включение в работу после окончания фиксации происходит плавно, 20 поскольку осуществляется лишь после увеличения противодействующего момента оператора до размера, необходимого для полной компенсации вращающего момента задающей СМ, отражающего имеющийся 25 нагрузочный момент.
Формула изобретения
Устройство для дистанционной переда- 30 чи угла поворота вала, содержащее установ- ленную на задающем валу синхронную машину с первым датчиком положения, исполнительную синхронную машину с вторым датчиком положения, коммутатор с коммутирующим и управляющим величиной тока входами, к выходам которого подключены параллельно якорные обмотки синхронных машин, выход второго датчика положения подключен к объединенным первым входам сравнивающего элемента и сумматора, выход которого подключен через блок деления на два к коммутирующему входу коммутатора, выход сравнивающего элемента подключен к управляющему величиной тока входу коммутатора, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения как автоматического слежения за углом поворота, так и фиксации этого угла на заданном уровне, в него дополнительно введены компаратор, синхронный IK-триг- гер, логический элемент И-НЕ и управляемый запоминающий элемент, вход которого подключен к выходу первого датчика положения, а выход - к обьединенным вторым входам сравнивающего элемента и сумматора, входы компаратора подключены соот- ветственно к входу и выходу запоминающего элемента, а выход - к первому входу логического элемента И-НЕ, второй вход которого подключен к выходу сравнивающего элемента, а выход- к I-вхо- ду синхронного IK-триггера, входы К и С которого объединены и являются входом управления устройства, а выход IK-триггера подключен к управляющему входу запоминающего элемента.
Фез &а
5 %,
fyjt
&,з
О1
$№,.
