(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| Устройство для крепления инструмента | 1987 |
|
SU1713760A1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ КОЛЕННЫМ СУСТАВОМ | 2020 |
|
RU2814943C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ АНАЛИЗА СВИНГА В ГОЛЬФЕ | 2008 |
|
RU2497565C2 |
| ПРЕДОТВРАЩЕНИЕ ПАДЕНИЯ | 2010 |
|
RU2550934C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 1990 |
|
RU2078309C1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| ПАССИВНОЕ ОРТОПЕДИЧЕСКОЕ ВСПОМОГАТЕЛЬНОЕ СРЕДСТВО В ВИДЕ ПРОТЕЗА ИЛИ ОРТЕЗА СТОПЫ | 2009 |
|
RU2473322C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПАССИВНОЙ РАДИОСИСТЕМОЙ | 2019 |
|
RU2719631C1 |
Использование изобретение относится к измерению механических величин и может быть использовано для определения длины шага человека животных и шагающих механизмов Сущность цель достигается определением последовательных постановок конечности на опору по максимальному пиковому значению ускорения дистального сегмента конечности, а расстояние между постановками конечности на опору - путем определения составляющих ускорения для двух точек дистального сегмента конечности, расположенных на фиксированном расстоянии одна от другой и последовательного определения с помощью двойного интегрирования составляющих перемещения и угла поворота дистального сегмента конечности 1 ил
Изобретение относится к измерению механических величин и может быть использовано для определения длины шага человека, животных а также шагающих механизмов.
Известен способ измерения длины шага, предполагающий оборудование специальной дорожки, состоящей из нескольких слоев материала, фиксирующих отпечатки ног с последующим измерением длины шага, как расстояния между последующими отпечатками.
Недостатком данного способа является невозможность его применения в естественных условиях движения человека Аналогичным недостатком обладает и способ измерения длины шага
Наиболее близким к заявляемому является способ измерения длины шага предполагающий использование дорожки, состоящей из поперечных металлических
пластин, соединенных между собой через сопротивление. При этом на носке и на пятке шагающей ноги имеются контакты При реализации этого способа постановка конечности на опору определяется по замыканию контактов, а расстояние между положениями конечности во время шага - по изменению сопротивления замыкаемой цепи.
Цель изобретения - повышение достоверности определения длины шага путем обеспечения возможности проведения измерений в естественных условиях выполнения локомоторного акта.
Цель достигается определением последовательных постановок конечности н а опору по максимальному пиковому значению ускорения дистального сегмента конечности, а расстояния между постановками ко- не«ности на опору - путем определения составляющих ускорения для двух точек диvi
V4
СК Ю
стального сегмента конечности, расположенных на фиксированном расстоянии друг от друга и последовательного определения с помощью двойного интегрирования составляющих перемещения и угла поворота дистального сегмента конечности.
Процесс осуществления способа иллюстрируется чертежом.
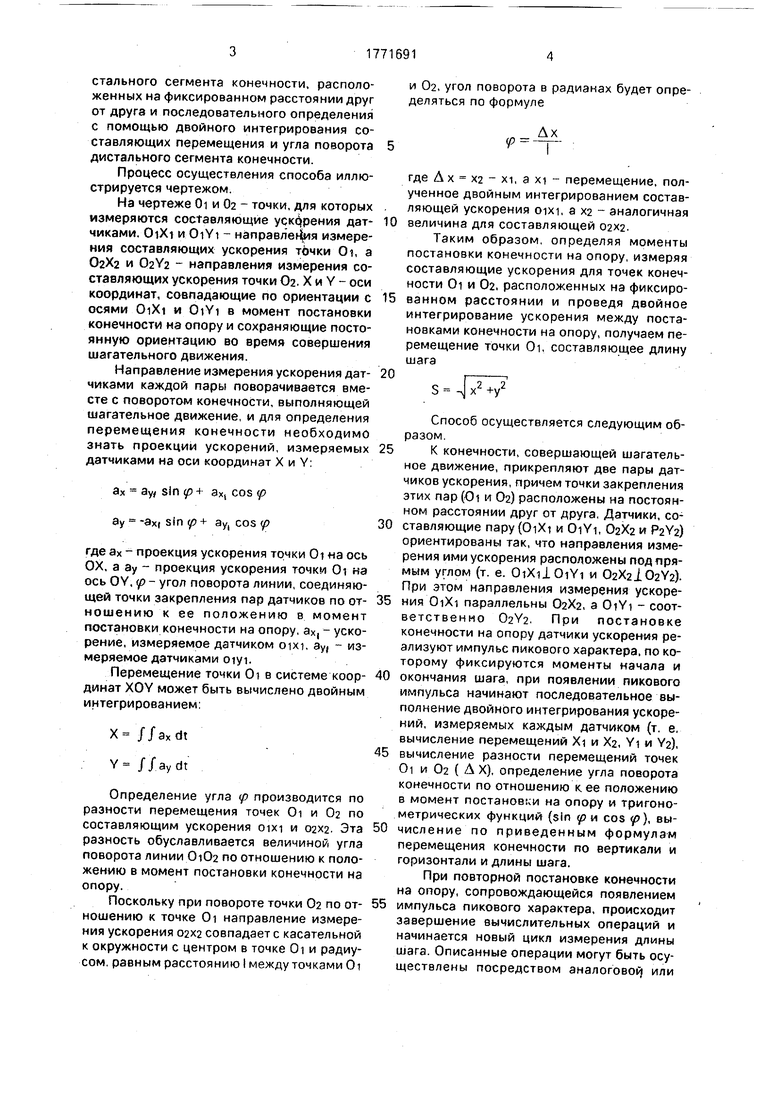
На чертеже От и 02 - точки, для которых измеряются составляющие ускорения датчиками. OiXi и OiYi - направления измерения составляющих ускорения тбчки Oi, a ОаХз и 02Y2 - направления измерения составляющих ускорения точки О2. X и Y - оси координат, совпадающие по ориентации с осями OiXi и OtYi в момент постановки конечности на опору и сохраняющие постоянную ориентацию во время совершения шагательного движения.
Направление измерения ускорения датчиками каждой пары поворачивается вместе с поворотом конечности, выполняющей шагательное движение, и для определения перемещения конечности необходимо знать проекции ускорений, измеряемых датчиками на оси координат X и Y:
ах ау, sin tp + аХ( cos p Эу -aX| sin (p + аУ| cos p
где ах - проекция ускорения точки Oi на ось ОХ, а ау - проекция ускорения точки Oi на ось ОY, р - угол поворота линии, соединяющей точки закрепления пар датчиков по отношению к ее положению в момент постановки конечности на опору, ах, - ускорение, измеряемое датчиком 01x1, ay) - измеряемое датчиками 01У1.
Перемещение точки Oi в системе координат XOY может быть вычислено двойным интегрированием:
Х /Jaxdt Y- J/aydt
Определение угла р производится по разности перемещения точек Oi и 02 по составляющим ускорения oixi и 02x2. Эта разность обуславливается величиной угла поворота линии ОЮ2 по отношению к положению в момент постановки конечности на опору.
Поскольку при повороте точки 02 по отношению к точке Oi направление измерения ускорения О2Х2 совпадает с касательной к окружности с центром в точке От и радиусом, равным расстоянию I между точками 01
0
5
и 02, угол поворота в радианах будет определяться по формуле
Дх Д х Х2 - XL a xi - перемещение, полученное двойным интегрированием составляющей ускорения oixi, a X2 - аналогичная величина для составляющей 02x2.
Таким образом, определяя моменты постановки конечности на опору, измеряя составляющие ускорения для точек конечности Ot и 02, расположенных на фиксированном расстоянии и проведя двойное интегрирование ускорения между постановками конечности на опору, получаем перемещение точки От, составляющее длину шага
Способ осуществляется следующим образом.
К конечности, совершающей шагательное движение, прикрепляют две пары датчиков ускорения, причем точки закрепления этих пар (Oi и 02) расположены на постоянном расстоянии друг от друга, Датчики, составляющие пару (61X1 и OiYi, 02X2 и P2Y2) ориентированы так, что направления измерения ими ускорения расположены под прямым углом (т. е. OiXilOiYi и 02X2102Y2). При этом направления измерения ускорения OiXi параллельны 02X2, a OiYi - соответственно 02Y2, При постановке конечности на опору датчики ускорения реализуют импульс пикового характера, по которому фиксируются моменты начала и
окончания шага, при появлении пикового импульса начинают последовательное выполнение двойного интегрирования ускорений, измеряемых каждым датчиком (т. е, вычисление перемещений Xi и Х2, YI и Y2),
вычисление разности перемещений точек Oi и 02 { А X), определение угла поворота конечности по отношению к. ее положению в момент постановки на опору и тригонометрических функций (sin р и cos р), вычисление по приведенным формулам перемещения конечности по вертикали и горизонтали и длины шага.
При повторной постановке конечности на опору, сопровождающейся появлением
импульса пикового характера, происходит завершение вычислительных операций и начинается новый цикл измерения длины шага. Описанные операции могут быть осуществлены посредством аналоговой) или
цифровой ЭВМ по известным программам и алгоритмам.
Формула изобретения Способ определения длины шага, состоящий в определении последовательных постановок конечности на опору и измерении расстояния между ними, отличающийся тем, что, с целью повышения достоверности определения длины шага путем проведения измерений в естественных условиях выполнения локомоторного акта, последовательные постановки конечности
////////////7///////////////////////
на опору определяют по максимальному пиковому значению ускорения дистального сегмента конечности, а расстояние между постановками на опору - путем определения составляющих ускорения для двух точек дистального сегмента конечности, расположенных на фиксированном расстоянии одна от другой, и последовательного определения с помощью двойного интегрирования составляющих перемещения и угла поворота дистального сегмента конечности, определяют длину шага.
| Чирсков А В Методика электрической регистрации отдельных элементов шага при ходьбе /Материалы II научной сессии ЦНИ- ИПП | |||
| М | |||
| Приспособление для отвешивания жидкости без предварительного определения веса тары | 1925 |
|
SU1952A1 |
