Изобретение относится к области машиностроения и может быть использовано для автоматизации сборочных процессов.
Цель изобретения - расширение технологических возможностей,
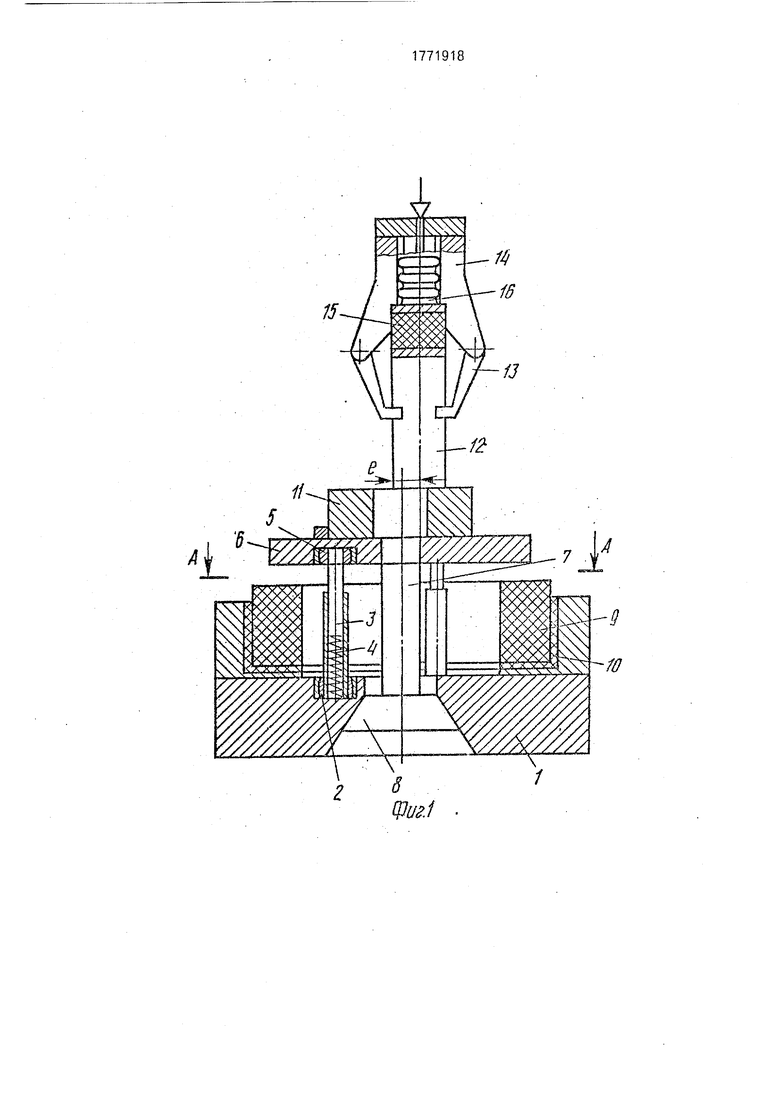
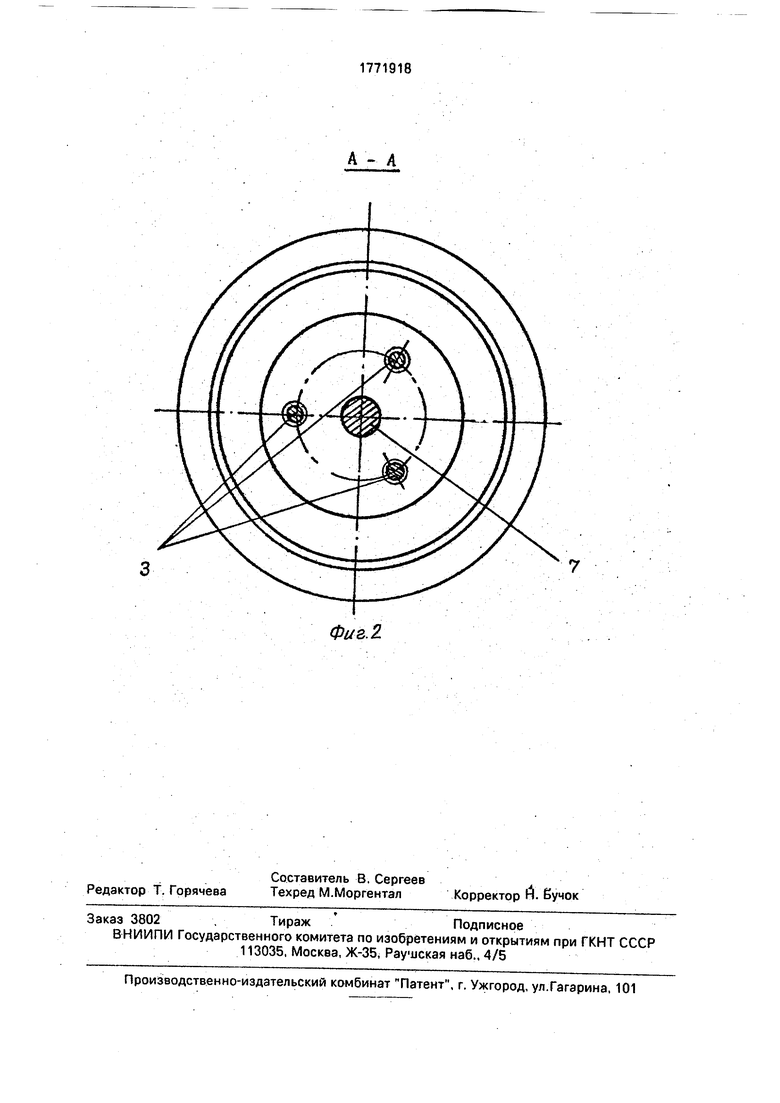
На фиг.1 показано осевое сечение устройства; на фиг.2 - сечение А-А на фиг.1.
Устройство для сборки содержит базирующее приспособление 1 в виде основания с углублением. В углублении базирующего приспособления по окружности сферическими шарнирами 2 закреплены телескопические опоры 3, которые пружинами 4 подпружинены в сторону увеличения своей длины. На телескопических опорах 3 сферическими шарнирами 5 закреплена базирующая платформа 6, по оси которой установлен жестко соединенный с ней стержень 7 с коническим хвостовиком 8, вершина конической поверхности при этом
направлена в сторону базирующей платформы 6. В центре базирующего приспособления выполнено коническое отверстие, соответствующее конической поверхности хвостовика 8 стержня 7.
Взаимодействие конических поверхностей обеспечивает центрирование платформы 6 относительно базирующего приспособления в исходном положении. В углублении базирующего приспособления смонтирован кольцевой опорный вибратор 9 с держателем 10. В исходчом состоянии платформа 6 и вибратор 9 не контактируют. Одна из собираемых деталей (втулка) 11 базируется в центре платформы б Другая деталь (валик) 12 базируется в захвате 13 сборочной головки 14. В корпусе сборочной головки 14 вмонтирован пьезокерамиче- ский вибратор 15 с пневмоприводом 16 Сборочная головка 14 при этом соединена с
V| V|
Ю 00
устройством пространственного перемещения.
Устройство работает следующим образом.
Одна из собираемых деталей (втулка) 11 располагается в центре базирующей платформы 6. Другая деталь (валик) 12 захватом 13 сборочной головки 14 захватывается с позиции поштучной выдачи деталей. При этом торец валика 2 контактирует с насадкой пьезокерамического вибратора 15. Сборочная головка 14 перемещается в позицию сборки. Подается сжатый воздух в пневмопривод 16, который прижимает торец пьезокерамического вибратора 15 к торцу 12. Включается питание пьезокерамического вибратора 1 б и валик 12 сообщаются осевые упругие колебания резонансной частоты. Включается питание опорного кольцевого вибратора 9. Сборочная головка 14 спуска- ется.
При несовпадении сопрягаемых поверхностей на величину е, возникающем в результате погрешностей позиционирования, торец валика 12 упирается в торец втулки 11. Дальнейшее опускание сборочной головки 14 приводит к тому, что сжимаются пружины 4 телескопических опор 3, базирующая платформа 6 опускается вниз до упора в торец кольцевого опорного вибратора 9. При этом конический хвостовик 8 стержня 7 освобождается. Платформа 6 может сво- „бодно передвигаться в плоскости, перпендикулярной осям собираемых деталей. Взаимодействие торца валика 12 с торцом втулки 11 создает центрирующую силу, направленную в сторону уменьшения несовпадения сопрягаемых поверхностей. Эта
центрирующая сила перемещает втулку 11 вместе с платформой б до совпадения сопрягаемых поверхностей и производится сопряжение. Захват 13 опускает валик 12 и
перемещается в исходную позицию. Собранные детали удаляются с позиции сборки и цикл сборки повторяется.
Формула изобретения Устройство для сборки, содержащее
сборочную головку с захватом и вибратором, базирующее приспособление в виде основания с углублением, опорный вибратор, установленный в углублении основания, и базирующую платформу, отличающ е е с я тем, что, с целью расширения технологических возможностей за счет сборки деталей, центр тяжести которых не совпадает с осью сопрягаемой поверхности, и за счет возможности осуществления
сборки в вакууме, в устройство дополнительно введены телескопические опоры, подпружиненные в сторону увеличения своей длины расположенные по окружности между основанием и базирующей платформой и соединенные с последними с помощью сферических шарниров, кроме то го, по оси базирующей платформы установлен жестко соединенный с ней стержень с коническим хвостовиком, вершина конической поверхности которого обращена в сторону базирующей платформы, а в основании выполнено коническое отверстие, вершина конической поверхности которого также обращена в сторону базирующей
платформы, и указанные конические поверхности имеют возможность взаимодействия, причем опорный вибратор выполнен кольцевым.
/
№к/
А - А

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки | 1989 |
|
SU1689010A1 |
| Устройство для сборки запрессовкой деталей типа вал-втулка | 1986 |
|
SU1333527A1 |
| Автомат для сборки деталей | 1979 |
|
SU831490A1 |
| Устройство для сборки | 1989 |
|
SU1731575A1 |
| СБОРОЧНАЯ ГОЛОВКА | 1992 |
|
RU2035285C1 |
| Адаптивная сборочная головка промышленного робота | 1988 |
|
SU1618561A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Способ сборки деталей | 1987 |
|
SU1523296A1 |
| ВИНТ И УСТРОЙСТВО ДЛЯ ЕГО УДЕРЖИВАНИЯ И ЗАВИНЧИВАНИЯ | 2006 |
|
RU2313008C1 |
| Устройство для взаимной ориентации деталей типа вал-втулка | 1984 |
|
SU1255359A1 |
Изобретение относится к машинострое нию и может быть использовано для аатома- тизации сборочных процессов. Цель изобретения - расширение технологических возможностей. Устройство содержит сборочную головку с захватом и вибратором и базирующее приспособление в виде основания с углублением, опорным вибратором и базирующей платформой, установленной на основании на шарнирных телескопических подпружиненных опорах. Кроме того, на платформе закреплен центральный стержень с коническим хвостовиком, взаимодействующим и коническим отверстием в основании. При несовпадении осей собираемых деталей под действием сборочного усилия платформа опускается до опорного вибратора. Его включение способствует центрированию собираемых деталей и их сборке. После снятия собранных деталей платформа поднимается и встает в исходное положение благодаря взаимодействию конических поверхностей. 2 ил сл
Фиг.2.
| Устройство для сборки | 1989 |
|
SU1689010A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
