Известны манипуляторы, содержащие станину, выполненную в виде колонны, связанной посредством системы шарнирно соединенных рычагов с узлом захвата заготовок, выполненным, например, в виде вакуумных присосов, снабженных пневмогидравлическим следящим приводом и системой дистанционного пневматического программного управления.
Предлагаемый манипулятор обеспечивает захват и перенос заготовок в любую заданную точку пространства, обслуживаемого манипулятором, и ориентирование заготовки в заданном положении.
Это достигается тем, что узел захвата заготовок выполнен вертикально перемещаемым посредством рычагов, связывающих узел захвата с подвижно установленной на колонне траверсой, а система рычагов снабжена цепным приводом, содержащим звездочки, установленные на осях шарниров системы, и обеспечивающим индивидуальное управление каждым рычагом и фиксирование узла захвата в требуемом положении.
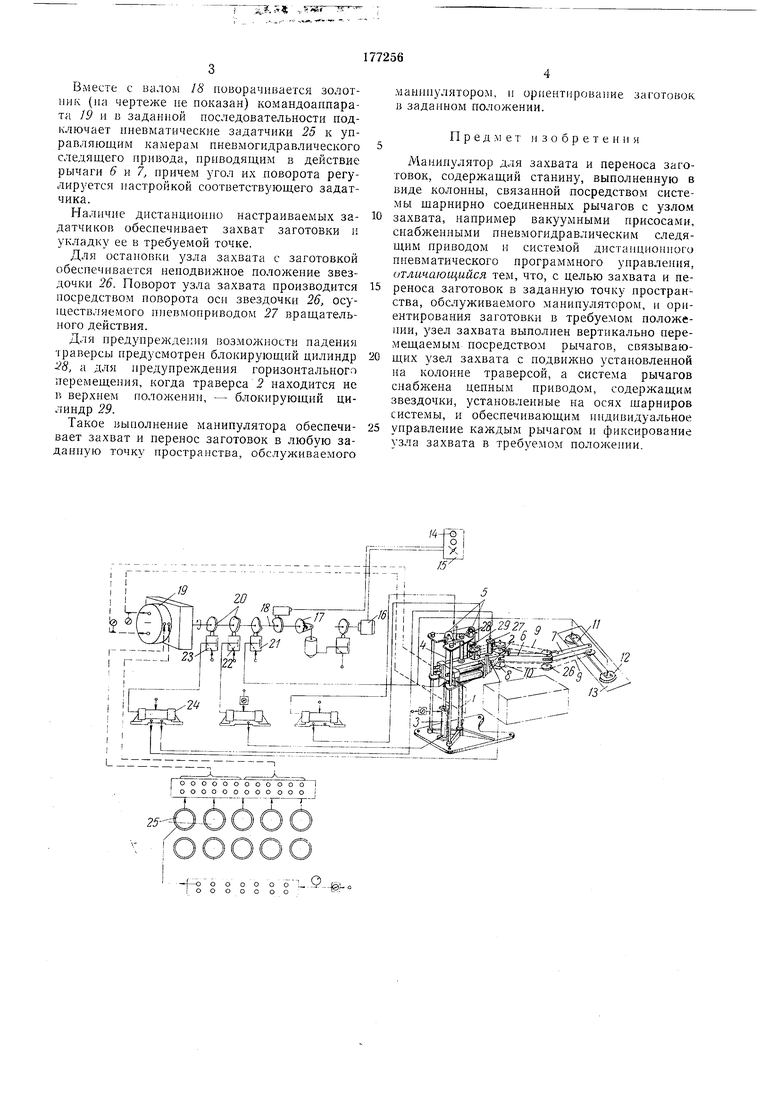
На чертеже изображен общий вид манипулятора и схема управления.
Манипулятор содержит станину 1, выполненную в виде колонны, по которой перемещается траверса 2 от пневмоцилиндра 3, соединенного с ней при помощи цепи 4 перекинутой через неподвижные ролики 5. В горизонтальной плоскости траверса имеет поворотное перемещение.
С траверсой связана система щарнирно соединенных рычагов б и 7, поворачиваемых вокруг оси 8, установленной на траверсе. Поворот рычагов осуществляется цепной передачей Я снабженной звездочками 10, установленными на осях шарниров, которые связывают рычаги 6 и 7.
На конце рычага 7 смонтирован узел захвата 11, несущий вакуумные присосы 12.
В исходном положении вакуумные присосы лежат на заготовке 13. При нажиме на кнопку 14 «пуск на пульте управления 15 начинает вращаться вал электродвигателя 16 и через храповой механизм 17 сообщает вращение валу 18 командоаппарата 19. Установленные на валу кулачки 20 последовательно нажимают на клапаны 21, 22 и 23 и соответственно включают в работу инжектор (на чертеже не показан) вакуумных присосов 12, производят подъем траверсы 2, поворот узла захвата // с перемещаемой заготовкой 13, а затем осуществляют опускание траверсы, выключение узла захвата, подъем пустой траверсы, поворот узла захвата в обратном направлении и опускание траверсы с узлом захвата на перемещаемую заготовку. Для управления циклом работы манипулятора предусмотрены также пневмопереключатели 24.
Вместе с ВсКюм 18 поворачивается золотнигч (на чертеже не показан) командоаппарата 19 и в заданной последовательности подключает пневматические задатчики 25 к управляющим камерам пневмогидравлического следящего привода, приводящим в действие рычаги 6 и 7, причем угол их поворота регулируется пастройкой соответствующего задатчика.
Наличие дистанционно настраиваемых задатчиков обесиечивает захват заготовки и укладку ее в требуемой точке.
Для остановки узла захвата с заготовкой обеспечивается неподвижное положепие звездочки 26. Поворот узла захвата производится посредством поворота оси звездочки 26, осуществляемого пневмоприводом 27 вращательного действия.
Для предупреждения возможности падения траверсы предусмотрен блокирующий цилиндр 8, а для предупреждения горизонтального перемещения, когда траверса 2 находится не п верхнем положении, - блокирующий цилппдр 29.
Такое выполнение манипулятора обеспечивает захват и перенос заготовок в любую задаппую точку пространства, обслуживаемого
мапппу.1ятором, и ориентирование
заготовок в заданном положении.
Предмет изобретении
Манипулятор для захвата и переноса заготовок, содержащий станину, выполненную в виде колоппы, связанной посредством системы щарнирно соединенных рычагов с узлом захвата, например вакуумными присосами, снабженными пневмогидравлическим следящим приводом п системой дистаппиониого пневматического программного унравления, отличающийся тем, что, с целью захвата и переноса заготовок в заданную точку пространства, обслуживаемого манипулятором, и ориентирования заготовки в требуемом положе1ЩИ, узел захвата выполнен вертикально перемещаемым посредством рычагов, связывающих узел захвата с подвижпо установленной на колонне траверсой, а система рычагов снабжена цепным приводом, содержащим звездочки, установленные на осях шарниров системы, и обеспечивающим индивидуальное управлепие каждым рычагом и фиксирование узла захвата в требуегмом положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Листогибочное устройство | 1979 |
|
SU841737A1 |
| Поточная линия для обработки кромок стекол | 1990 |
|
SU1728139A1 |
| Автоматическая линия для обработки сферических поверхностей, например экранов электронно-лучевых трубок | 1959 |
|
SU124829A2 |
| Устройство для изготовления тары | 1988 |
|
SU1600967A1 |
| Установка для многономенклатурной штамповки полосового материала различной толщины | 1982 |
|
SU1069908A1 |
| МАНИПУЛЯТОР С ВАКУУМНЫМ ЗАХВАТОМ | 1995 |
|
RU2099176C1 |
| Устройство для распрямления трубчатых заготовок для картонных коробок | 1990 |
|
SU1828430A3 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1987 |
|
SU1416242A1 |
| Установка для индукционного нагрева и подачи на последующую обработку листовых заготовок | 1984 |
|
SU1268625A1 |
