Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравлических приводах экскаваторов и землеройно-транспортных агрегатов.
Целью изобретения является повышение КПД и расширение функциональных возможностей.
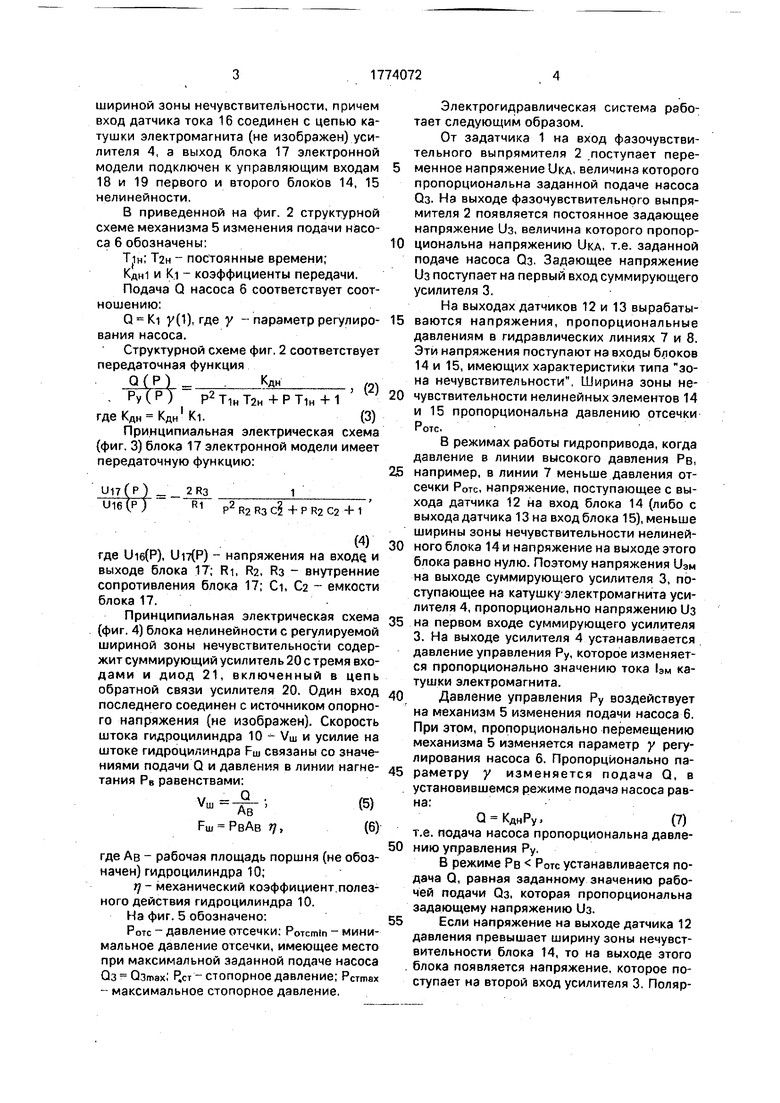
На фиг. 1 изображена схема электрогидравлической системы; на фиг, 2 - структурная схема механизма изменения подачи насоса; на фиг. 3 - принципиальная электрическая схема блока электронной модели; на фиг. 4 - принципиальная электрическая схема нелинейного блока; на фиг. 5 - зависимость подачи насоса от давления.
Система содержит последовательно соединенные задатчик 1, фазочувствительный
выпрямитель 2, суммирующий электронный усилитель 3, электрогидравлический усилитель 4 и механизм 5 изменения подачи насоса 6, подключенного гидравлическими линиями 7, 8 к предохранительному клапану 9 и гидроцилиндру 10, шток (не обозначен) которого соединен с рабочим органом 11 первый и второй датчики 17, 13 давление, входы которых подключены к линиям 7, 8, а выходы датчиков 12, 13 через нелинейные блоки 14, 15 типа зона нечувствительности соединены со вторым и с третьим входами суммирующего электронного усилителя 3. Кроме тою, последовательно соединенный датчик 16 тока vrminc/iq 4 и блок 17 электронной модепи механизма 5 изменения подачи нэслга б я нелпноиные блоки 14 и 15 выполнены i f i тируемой
XJ XI N
о
XI
N)
..™
шириной зоны нечувствительности, причем вход датчика тока 16 соединен с цепью катушки электромагнита (не изображен) усилителя 4, а выход блока 17 электронной модели подключен к управляющим входам 18 и 19 первого и второго блоков 14, 15 нелинейности.
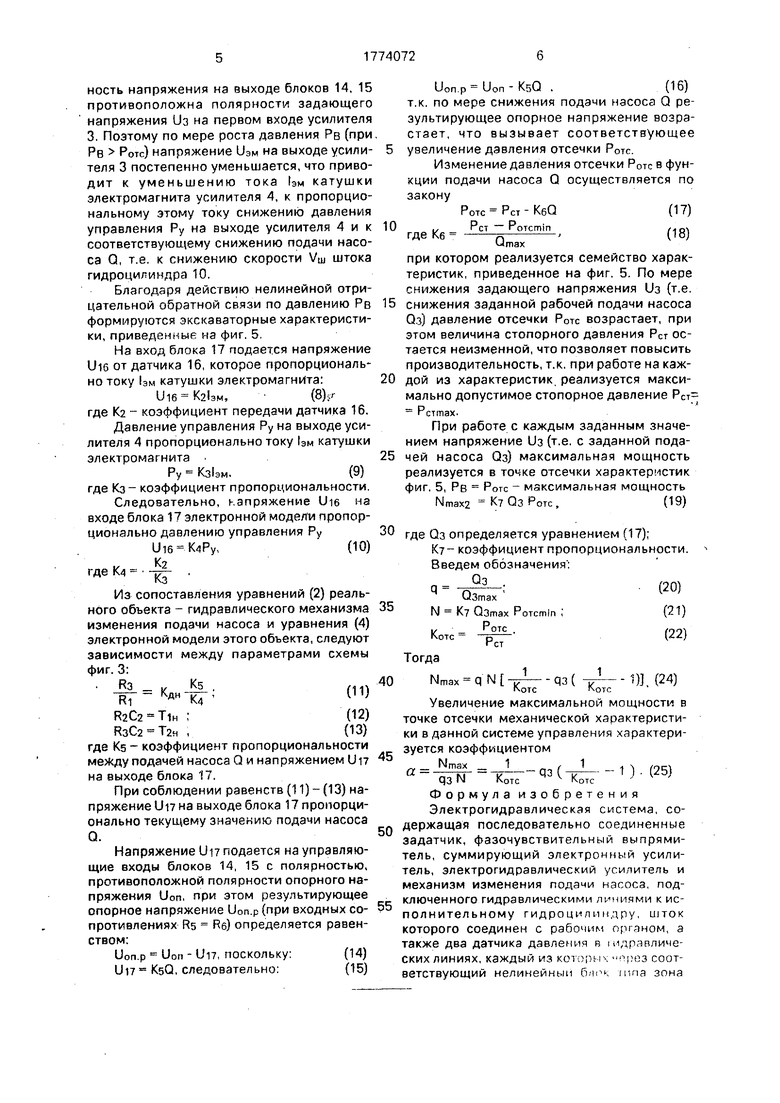
В приведенной на фиг. 2 структурной схеме механизма 5 изменения подачи насоса 6 обозначены:
Пн; Т2н постоянные времени;
Кдн1 и Ki - коэффициенты передачи.
Подача Q насоса б соответствует соотношению:
Q Ki y(1), где у - параметр регулирования насоса.
Структурной схеме фиг. 2 соответствует передаточная функция
Q ( Р ) КдН
- РУ ( р ) Р2 TIH Т2н + Р Т1н + 1 I
(2)
гдеКд Кдн К.(3)
Принципиальная электрическая схема (фиг. 3) блока 17 электронной модели имеет передаточную функцию:
U17( Р) 2R31
U16 (Р )R1 P2R2R3C2 +PR2C2-M
(4)
где Ui6(P), Ui(P) напряжения на входе и выходе блока 17; Ri, R2, Ra - внутренние сопротивления блока 17; Ci, C2 - емкости блока 17.
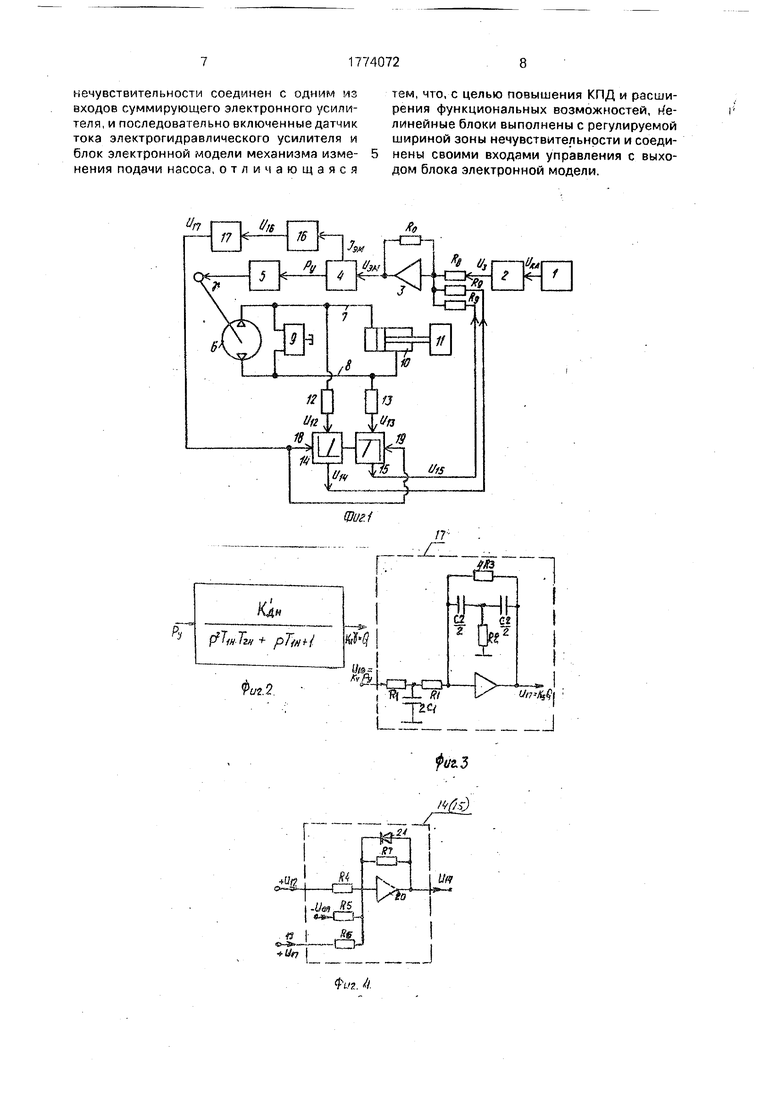
Принципиальная электрическая схема (фиг. 4) блока нелинейности с регулируемой шириной зоны нечувствительности содержит суммирующий усилитель 20 с тремя вхо- дами и диод 21, включенный в цепь обратной связи усилителя 20. Один вход последнего соединен с источником опорного напряжения (не изображен). Скорость штока гидроцилиндра 10 - Уш и усилие на штоке гидроцилиндра FUJ связаны со значениями подачи Q и давления в линии нагнетания Рв равенствами:
Q .
Ж Рш РвАв /,
Уш (5) (6)
где Ав рабочая площадь поршня (не обозначен) гидроцилиндра 10;
ц - механический коэффициент полезного действия гидроцилиндра 10.
На фиг. 5 обозначено:
Роте давление отсечки; Ротстт - минимальное давление отсечки, имеющее место при максимальной заданной подаче насоса Оз Озтах, Р.ст - стопорное давление; Рсттах -- максимальное стопорное давление.
Электрогидравлическая система работает следующим образом.
От задатчика 1 на вход фазочувстви- тельного выпрямителя 2 поступает пере5 менное напряжение UKA, величина которого пропорциональна заданной подаче насоса 0.3. На выходе фазочувствительного выпрямителя 2 появляется постоянное задающее напряжение Уз, величина которого пропор10 циональна напряжению UKA, т.е. заданной подаче насоса Оз. Задающее напряжение Us поступает на первый вход суммирующего усилителя 3.
На выходах датчиков 12 и 13 вырабаты15 ваются напряжения, пропорциональные давлениям в гидравлических линиях 7 и 8. Эти напряжения поступают на входы блоков 14 и 15, имеющих характеристики типа зона нечувствительности, Ширина зоны не20 чувствительности нелинейных элементов 14 и 15 пропорциональна давлению отсечки
РОТС.
В режимах работы гидропривода, когда давление в линии высокого давления Рв,
25 например, в линии 7 меньше давления отсечки Роте, напряжение, поступающее с выхода датчика 12 на вход блока 14 (либо с выхода датчика 13 на вход блока 15), меньше ширины зоны нечувствительности нелиней30 ного блока 14 и напряжение на выходе этого блока равно нулю. Поэтому напряжения Кэм на выходе суммирующего усилителя 3, поступающее на катушку электромагнита усилителя 4, пропорционально напряжению из
35 на первом входе суммирующего усилителя 3. На выходе усилителя 4 устанавливается давление управления Ру, которое изменяется пропорционально значению тока эм катушки электромагнита.
40 Давление управления Ру воздействует на механизм 5 изменения подачи насоса 6. При этом, пропорционально перемещению механизма 5 изменяется параметр у регулирования насоса 6. Пропорционально па45 раметру у изменяется подача Q, в установившемся режиме подача насоса равна:
О КднРу,(7)
т.е. подача насоса пропорциональна давле50 нию управления Ру.
В режиме Рв РОТС устанавливается подача Q, равная заданному значению рабочей подачи Оз. которая пропорциональна задающему напряжению .
55 Если напряжение на выходе датчика 12 давления превышает ширину зоны нечувствительности блока 14, то на выходе этого блока появляется напряжение, которое поступает на второй вход усилителя 3. Полярность напряжения на выходе блоков 14, 15 противоположна полярности задающего напряжения Уз на первом входе усилителя 3. Поэтому по мере роста давления Рв (при Рв Роте) напряжение УЭм на выходе усили- теля 3 постепенно уменьшается, что приводит к уменьшению тока 1Эм катушки электромагнита усилителя 4, к пропорциональному этому току снижению давления управления Ру на выходе усилителя 4 и к соответствующему снижению подачи насоса Q, т.е. к снижению скорости /ш штока гидроцилиндра 10.
Благодаря действию нелинейной отрицательной обратной связи по давлению РВ формируются экскаваторные характеристики, приведенные на фиг. 5,
На вход блока 17 подается напряжение UIG от датчика 16, которое пропорционально току Эм катушки электромагнита:
У1б К21эм, (8)/
где Ка - коэффициент передачи датчика 16.
Давление управления Ру на выходе усилителя 4 пропорционально току Эм катушки электромагнита
Ру - .(9)
где Кз коэффициент пропорциональности.
Следовательно, напряжение Uie на входе блока 17 электронной модел и пропорционально давлению управления Ру
,(10)
К2
где Кз
Кз
Из сопоставления уравнений (2) реального объекта - гидравлического механизма изменения подачи насоса и уравнения (4) электронной модели этого объекта, следуют зависимости между параметрами схемы фиг. 3:
Кб .
R3 v Tfj-- КД
ЯзСа Тан
К4
(11)
(12) (13)
где Ks - коэффициент пропорциональности между подачей насоса Q и напряжением Ui на выходе блока 17.
При соблюдении равенств (11) - (13) напряжение Ui на выходе блока 17 пропорционально текущему значению подачи насоса Q.
Напряжение Ui подается на управляющие входы блоков 14, 15 с полярностью, противоположной полярности опорного напряжения Uon, при этом результирующее опорное напряжение Uon.p (при входных со- противлениях Rs Re) определяется равенством:
Uon.p Don - Ui, поскольку:(14)
Ui KsQ, следовательно:(15)
Uon p Uon - fed .(16)
т.к. по мере снижения подачи насоса Q результирующее опорное напряжение возрастает, что вызывает соответствующее увеличение давления отсечки Р0тс.
Изменение давления отсечки Р0тс в функции подачи насоса Q осуществляется по закону
Роте Рст - КбО Рст - PoTcmin
где Кб
Qr
(17) (18)
5 10
15
20
25
0
5
при котором реализуется семейство характеристик, приведенное на фиг. 5. По мере снижения задающего напряжения Уз (т.е. снижения заданной рабочей подачи насоса Оз) давление отсечки Р0тс возрастает, при этом величина стопорного давления РСт остается неизменной,что позволяет повысить производительность, т.к. при работе на каждой из характеристик, реализуется максимально допустимое стопорное давление РСт
РсттахПри работе с каждым заданным значением напряжение Уз (т.е. с заданной подачей насоса Оз) максимальная мощность реализуется в точке отсечки характеристик фиг, 5, РВ Роте - максимальная мощность
Nmaxa К70зРотс,(19)
где Оз определяется уравнением (17);
коэффициент пропорциональности. Введем обозначения :
q- °3
Коте
Тогда
ОЗтах N К ОЗтах PoTcmin РОТС .
СТ
(20) (21) (22)
0
5
0
5
1
Nmax qN y--q3( )J (24)
IVHCК-отс
Увеличение максимальной мощности в точке отсечки механической характеристики в данной системе управления характеризуется коэффициентом
Nmax 1 , 1 . ч („с гг г;Цо v
q3N Коте 4°v Коте Формула изобретения Электрогидравлическая система, содержащая последовательно соединенные задатчик, фазочувствительный выпрямитель, суммирующий электронный усилитель, электрогидравлический усилитель и механизм изменения подачи насоса, подключенного гидравлическими линиями к исполнительному гидроцилпкдру, шток которого соединен с рабочим органом, а также два датчика давления в мдравличе- ских линиях, каждый из которых соответствующий нелинейный б/юк мша зона
нечувствительности соединен с одним из входов суммирующего электронного усилителя, и последовательно включенные датчик тока электрогидравлического усилителя и
блок электронной модели механизма изме- 5 нены своими входами управления с выхо- нения подачи насоса, отличающаяся дом блока электронной модели.
тем, что, с целью повышения КПД и расширения функциональных возможностей, nte- линейные блоки выполнены с регулируемой шириной зоны нечувствительности и соеди
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный электрогидравлический привод экскаватора | 1989 |
|
SU1681036A1 |
| Электрогидравлическая система | 1989 |
|
SU1714219A1 |
| Электрогидравлическая система | 1989 |
|
SU1781467A1 |
| Электрогидравлическая система | 1989 |
|
SU1828956A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Гидравлический источник питания | 1979 |
|
SU981712A1 |
| Электрогидравлический привод | 1989 |
|
SU1629634A1 |
| Электрогидравлическая система совмещенного управления | 1988 |
|
SU1548363A1 |
| Насосная установка с ограничением потребляемой мощности преимущественно для термопластавтоматов | 1990 |
|
SU1803610A1 |
| Устройство для регулирования турбины с отбором пара | 1983 |
|
SU1138525A1 |

Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравлических приводах экскаваторов и землеройно-транспортных агрегатов, Целью изобретения является повышение КПД и расширение функциональных возможностей. От задатчика 1 на вход выпрямителя 2 поступает задающее переменное напряжение, соответствующее заданной подаче насоса 6. Давление управления воздействует на механизм 5 изменения подачи насоса 6. Если напряжение на выходе датчика 12 превышает ширину зоны нечувствительности блока 14, то с выхода последнего напряжение поступает на вход усилителя 3. На входе блока 17 напряжение пропорционально току усилителя 4. По мере снижения задающего напряжения давление отсечки возрастает, а величина стопорного давления остается неизменной. При достижении давления отсечки, равного давлению нагнетания насоса 6, реализуется максимальная полезная мощность сл с
г
ЛИ
Q
Фуг, 5
max
| Электрогидравлическая система | 1989 |
|
SU1714219A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
