Изобретение относится к перегрузоч1,ым механизмам, применяемым в РТК и ГПС механообработки, обслуживающих металлообрабатывающие станки с ЦПУ.
Известен манипулятор, обслуживающий складскую систему и переставляющий тару с заготовками состилажа на робокару. О к имеет телескопическую каретку, выдвигающуюся горизонтально при помощи реечной передачи и перемещающуюся вертикально на небольшую высоту при помощи винтового механизма. Недостатком этого манипулятора является невозможность использовать его для перестановки кассеты с заготовками с робокары на станок л СО станка кассеты с готовыми деталями на робокару. Эту работу выполняет оператор,
Наиболее близким к предлагаемому техническому решению является манипулятор, выполняющий те же функции, имеющий телескопическую каретку с механизмом ее горизонтального перемещения и механизмом вертикального перемещения на высоту стеллажей склада, выполненного в виде тросовой передачи. Этот манипулятор также не приспособлен для непосредственного обслуживания станкз.
Целью 1:/ Зобретения является расширение функциональных возможностей маниF yn,qropa.
предлагаемый манипулятор предназs sa4eii для использования как в складской системе, так и в обслуживании непосредстваинс станка, перемещая тару с заготовками е робокарь на стол станка и тару с готовыми деталями со стола станка на робокару.
Для достижения поставленной цели манипулятор содержит телескопическую каретку, механизмы ее горизонтального и вертикального перемещения, механизм поворота каретки и механизм вертикального перемещения кассеты.
Механизм горизонтального перемещения каретки выполнен в виде передачи винт-гайка и системы шкивов, соединенных между собой тросом, концы которого закреплены на верхней подвижной и на нижней неподвижной частях каретки и расположен внутри каретки.
Пре,дложенный механизм имеет более простую конструкцию по сравнению с телескопичесйой винтовой передачей, применяемой в прототипе.
Механизм вертикального перемещения каретки выполнен в виде четырех передач винт-гайка, приводимых в движение от цепной передачи и расположен в нижней части манипулятора под кареткой, нижняя неподвижная часть которой лежит на концах ходовых винтов.
Четыре передачи винт-гайка обеспечивают повыщенную жесткость и точность
подъема каретки и механизм не требует дополнительных направляющих, применяемых 8 прототипе.
у1еханизм поворота каретки выполнен в виде червячной передачи, расположенной
0 в нижней части манипулятора, и поворачивающий механизм вертикального перемещения с укрепленной в верхней его части кареткой. Механизм подъема кассеты выполнен в виде четырех реечных передач,
5 приводимых в движение от цепной передачи, и нижняя часть реек укреплена в подшипниках скольжения на одном основании с механизмом вертикального перемещения каретки.
0 Механизм поворота каретки и механизм подъема кассеты позволяет расширить функциональные возможности манипулятора и обеспечить одновременно загрузку и разгрузку станка путем осуществления промежуточного хранения кассеты с деталями или заготовками.
Конструкция манипулятора представлена на чертеже.
Манипулятор состоит из телескопиче0 ОКОЙ каретки, механизма горизонтального перемещения каретки, механизма подъема кассеты, механизма вертикального перемещения каретки, механизма поворота каретки.
5Телескопическая каретка состоит из подвижных 1 и 2 и неподвижных 3 частей. Каретки соединены между собой при помощи роликов 4, катающихся в пазах каждой части каретки. Механизм горизонтального пере0 мещения кареток состоит из передачи винтгайка 5, приводимой в движение от двигателя б через зубчатую передачу и тросовую передачу, натянутую на шкивы 7. Механизм вертикального перемещения
5 каретки состоит из четырех передач винтгайка 8, приводимых в движение от электродвигателя9, конической зубчатой передачи и цепной передачи 10. Ходовые винты верхней своей частью соединены с неподвижной
0 частью каретки, а нижней частью через шариковые направляющие крепятся на основании 11. На этом же основании крепится механизм аертикального перемещения кассеты 12, состоящий из четырех реечных передач 13, приводимых в движение от электродвигателя 14 через червячную передачу 15 и цепную передачу 16, Рейки верхней своей частью упираются в кассету, а нижней частью через опоры скольжения 17 закреплены на основании 11.
Механизм поворота манипулятора состоит из червячной передачи 18 и через зубчатую передачу приводится в движение электродвигателем 19. Червячное колесо связано с основанием 11.
Манипулятор работает следующим образом.
При работе электродвигателя 6 через прямозубую передачу Zi и Z2 вращается ходовой винт 5 и перемещает подвижную часть каретки 2, которая катится на роликах 4 относительно неподвижной части каретки 3. При этом тросовая передача, состоящая из троса, неподвижно закрепленного на нижней части каретки 3 и верхней части каретки 2 раскладывается, перемещая платформу 1 с кассетой 12 относительно подвижной части каретки 2. Таким образом результирующее горизонтальное перемещение кассеты с деталями 12 равно двойному ходу гайки ходового винта.
При работе электродвигателя 9 через коническую передачу Za, Z, цепную передачу 10 вращение передается на гайки 8 и четыре ходовых винта, концы которых укреплены в шарнирных направляющих, поднимают каретку и тару с деталями. При необходимости поднять тару с деталями и снять ее с каретки работает электродвигатель 14 и через червячную передачу 15, цепиую 16 рейки реечной передачи 13 снимают тару с деталями с каретки. Концы реек установлены в опорах скольжения.
Каретка, механизм горизонтального перемещения каретки, механизм вертикального перемещения каретки и механизм вертикального перемещения тары с деталями закреплены на основании 11, связано с выходной осью механизма поворота манипулятора. Поворот на 90° осуществляется от электродвигателя 19, зубчатую передачу Zs ;Z6 и червячную передачу 18.
Предложенный манипулятор транспортирует кассету весом до 50 кг. Величина горизонтального перемещения - 780 мм; вертикальное перемещение каретки - 30
мм, вертикальное пеобмешение кассеты 200 мм, угол поворота каретки 90°, Предназначен для обслуживания станков с ЧПУ типа 1Кб2ПУидр.
Формула изобретения
1.Манипулятор для ГПС механообработки; содержащий основание, телескопическую каретку с опорной поверхностью под кассеты, включающую верхнюю и среднюю подвижные и нижнюю неподвижную части, механизм горизонтального перемещения каретки, механизм вертикального перемещения каретки и приводы механизмов перемещения,отличающийся тем,что, с целью расширения технологических возможностей, он снабжен механизмом поворота каретки и механизмом вертикального перемещения кассеты.
2.Манипулятор поп.1,отличающи и с я тем, что механизм горизонтального перемещения каретки выполнен в виде передачи винт-гайка и системы шкивов, соединенных между собой гибкой связью, размещенной внутри каретки, концы которой закреплены соответственно на верхней и нижней частях каретки,
3.Манипулятор поп.1,отличающий с я тем, что механизм вертикального перемещения каретки установлен в нижней части манипулятора под кареткой и выполнен в виде четырех передач винт-гайка, гайки которых связаны с приводом посредством цепной передачи, при этом верхние концы ходовых винтов закреплены на неподвижной части каретки, а нижние на основании посредством шарнирных направляющих.
4.Манипулятор поп.1,отличающий с я тем, что механизм подъема кассеты выполнен в виде четырех реечных передач, зубчатые колеса которых связаны с приводом посредством цепной передачи, при этом нижняя часть реек установлена в основании посредством подшипников скольжения, а верхняя их часть размещена с возможностью взаимодействия с кассетой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| Гибкая производственная система | 1988 |
|
SU1743802A1 |
| Транспортно - накопительное устройство | 1990 |
|
SU1812056A1 |
| Способ штамповки деталей из полосового материала и установка для его осуществления | 1987 |
|
SU1586826A1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Устройство для поворота и фиксации бабки изделия | 1982 |
|
SU1047669A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
Использование; машиностроение, в частности перегрузочные устройства для ГПС. Сущность изобретения: манипулятор снабжен механизмом поворота каретки 3, выполненным в виде червячной передачи 18, и механизмом вертикального перемещения кассеты 12, выполненным в виде четырех реечных передач 13. 3 з,п.ф-лы, 1 ил.слс^ VJ:сл iro |оо00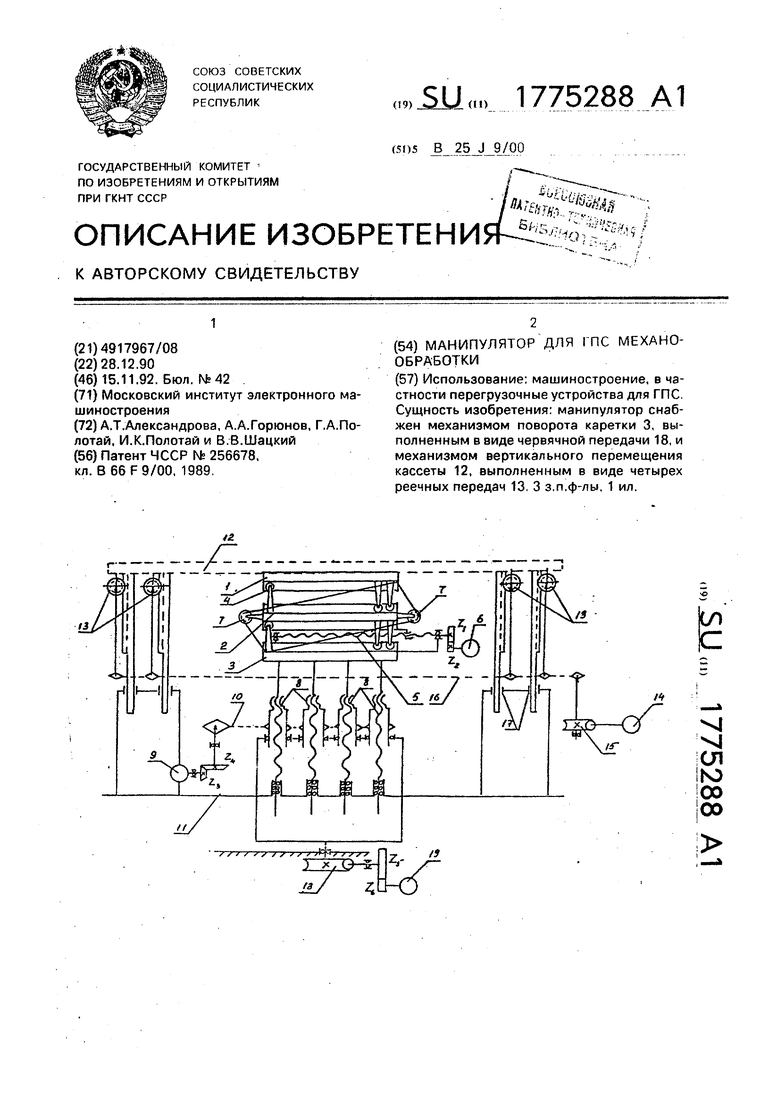
| УСТРОЙСТВО для ОБОГАЩЕНИЯ СЫПУЧЕГО МАТЕРИАЛА | 0 |
|
SU256678A1 |
| Приспособление для уменьшения тяги в печной трубе | 1924 |
|
SU866A1 |
