113
Изобретение относится к промьштлен ному транспорту, в частности к кра- нам-штабелерам,
Цель изобретения упрощение конс трук11;ии,.
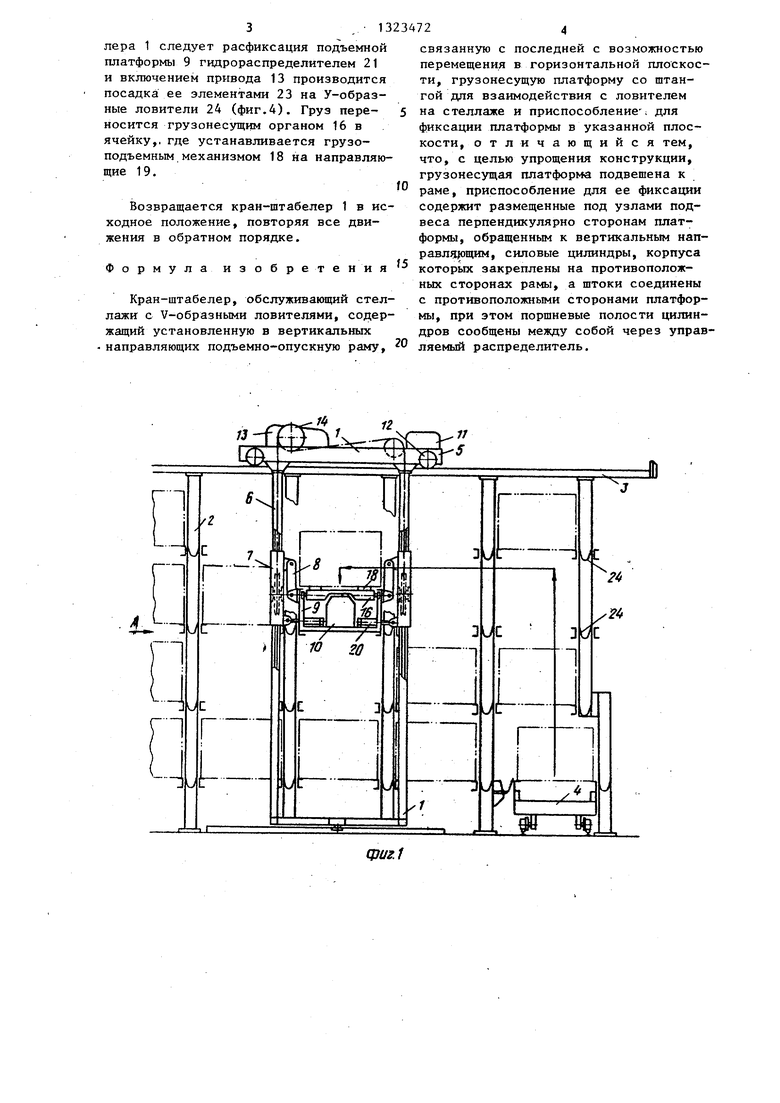
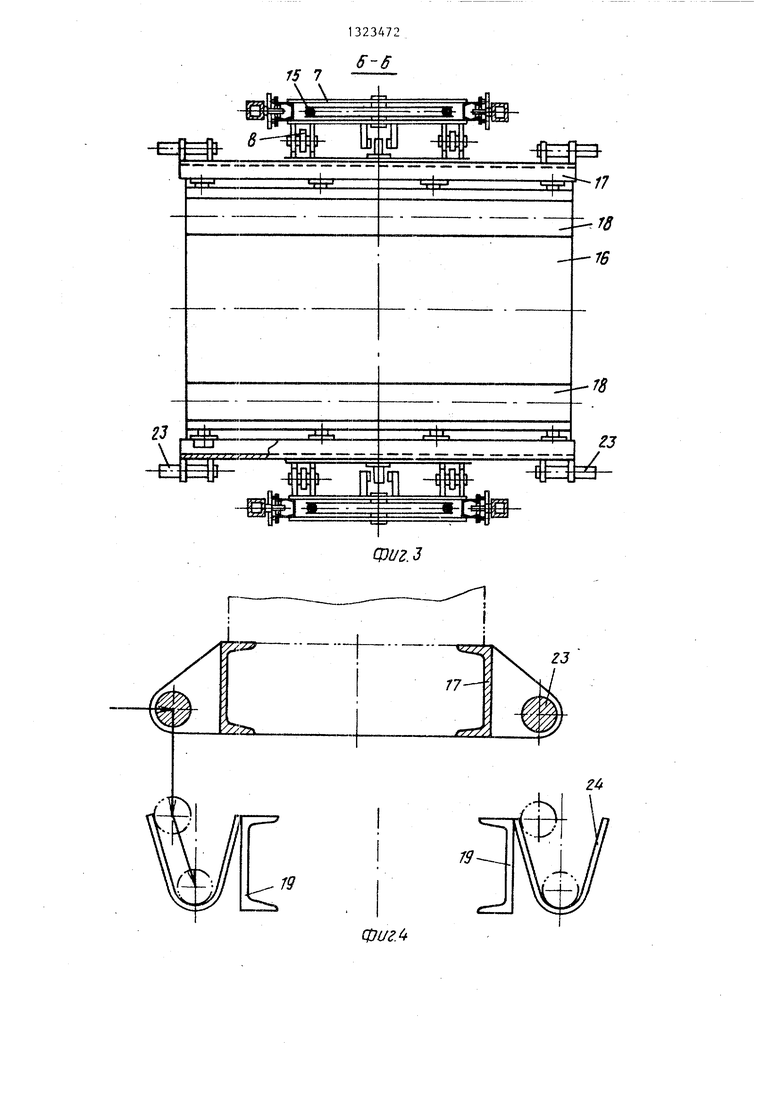
На фиг.1 изображен автоматизированный склад с краном-штабелером;; на фиг.2 - вид А на фиг.1} на фиг.3- разрез Б-Б на фиг. 2; на фиг. 4 - схема ориентации подъемной платформы крана-штабелера относительно ячеек
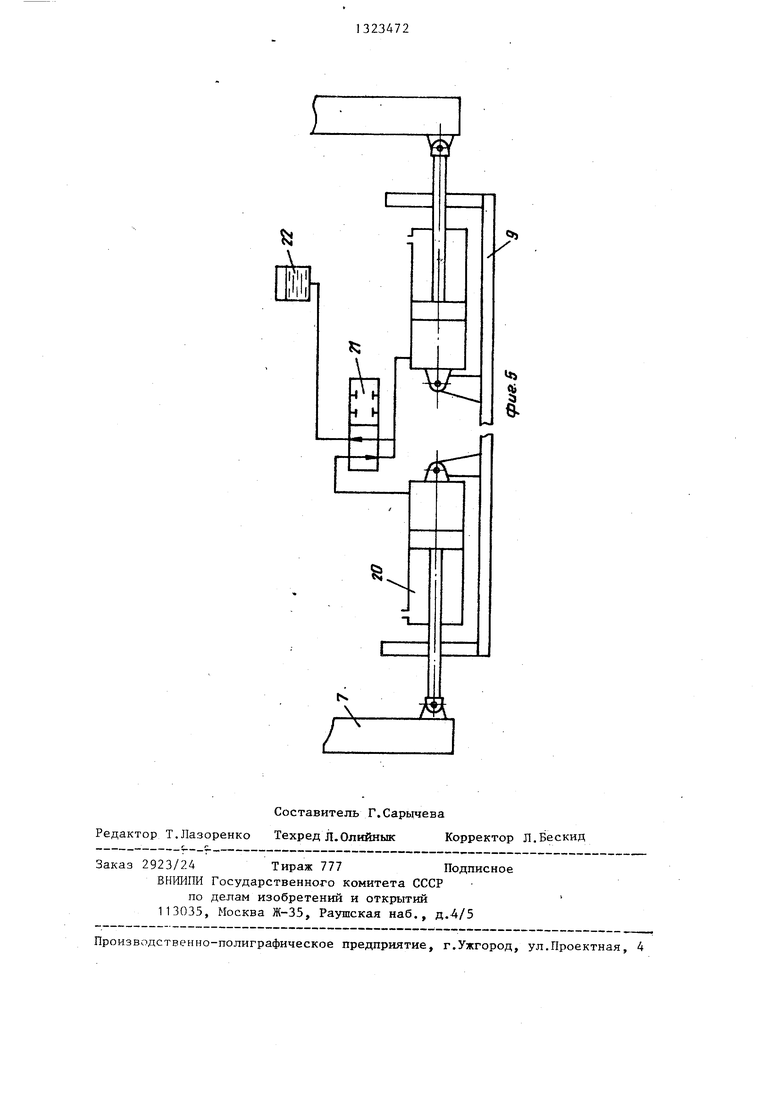
стеллажа; на фиг.5 - схема фиксации
Доставка груза вовнутрь стеллажей 2 или, наоборот, вывоз груза произподъ€;мной платформы крана- штабелера. Кран-штабелер 1 установлен в авто- матизированньш склад, который содер- t5 водится загрузочной тележкой 4. Груз, жит многоярусныестеллажи 2, на рель- доставляемый вовнутрь приемной ячей- сах 3. Рядом ео стеллажами уставов- ки стеллажа 2, принимается грузозахва- лена загрузочная тележка 4. Кран-штабелер 1 (фиг.1) состоит из приводной теле7хки 5, к которой крепятся верти- 20 расположенньй на верхней полке нап- кальные направляющие 6. В направляю- равляющих 19 приемной ячейки, вкаты- щих 6 установлена подъемно-опускная рама 7, к которой шарнирно на тягах 8 подвешена грузонесущая платформа
9. с ;размещенным на ней грузозахват- 25 поднимается над направляющими 19 и °ным механизмом 10.затем переносится грузонесущим оргаЛоманой стрелкой показана траекто- ном 16 на платформу 9. При движение рия движения подъемной платформы кра- внутрь ячейки и обратно грузонесущий на-штабелера (фиг.1,2,4).орган 16 перемещается, например, кат На приводной тележке 5 установле- 30 ками с направляющих 17 на направляю- ны привод 11 для ведущих катков 12 щие 19 и наоборот по их нижним пол- и привод 13 барабана 14, связанные с рамой 7 канатами 15 (фиг.2). Грузо- захватньй механизм 10 имеет грузонесущий орган 16 в виде поддона, опи- 35 наматываются канаты 15, заставляя рающегося на направляющие 17 (фиг.З), перемещаться вверх раму 7 по верти- имеющие две полки: нижнюю - для перемещения грузонесущего органа 16, верхнюю - для установки груза (фиг.4).
10
тным механизмом 10 платформы 9 крана-штабелера 1, для чего под груз,.
вается грузонесущий орган 16 грузозахватного механизма 10. Включением грузоподъемного механизма 18 груз
кам.
Включением привода 13 приводится во вращение барабан 14, на которьй
Грузонесущий орган 16 имеет грузоподъемный механизм 18, служащий для установки или съема груза с направляющих 19 ячеек стеллажа 2, которые в своем сечении идентичны направляющим 17.
Лля фиксации от раскачивания подвешенной между,элементами рамы 7 платформы 9 при движении крана- штабелера 1 вдоль стеллажей 2 служат два гидроцилиндра 20, корпуса которых 50 щарнирно крепятся к платформе 9 : (фиг.1 и 5), а штоки шарнирно связаны с элементами рам 7. Поршневые покальным направляющим 6 приводной тележки 5 крана-штабелера 1 и связанную с ними тягами 8 платформу 9. Подъем производится до положения, когда элементы 23 поднимутся над искомым горизонтальным рядом У-образ- ных ловителей 24 на величину, обеспечивающую беспрепятственный проход крана-штабелера 1 вдоль всего ряда стеллажей 2.
Перед началом горизонтального перемещения крана-штабелера 1 производится фиксац11я подъемной платформы 9, для чего электроуправляемый гидрораспределитель 21 отсекает поршневые полости гидроцилиндров 20 друг от друга и от гидробака 22. Затем включается привод 11, который привоПеред началом горизонтального перемещения крана-штабелера 1 производится фиксац11я подъемной платформы 9, для чего электроуправляемый гидрораспределитель 21 отсекает поршневые полости гидроцилиндров 20 друг от друга и от гидробака 22. Затем включается привод 11, который приволости гидроцилиндрон 20 сообщаются
межлу собой через электроуправляемый 55 дит во вращение ведущие катки 12пригидрораспределитель 21. Для компенса- водной тележ: и 5, заставляя ее цереции возможных утечек рабочей жидкое- мещаться по рельсам 3 до искомой
ти из гидроцилиндрон 20 через уплот- . ячейки. После остановки крана-штабеO
нения штоков и поршней имеется гид- робак 22 с ее запасом (фиг.5).
На боковых сторонах подъемной платформы 9 жестко крепятся элементы 23 (фиг.З), с помощью которых подъемная платформа 9 опирается при ориентации на У-образные ловители 24, расположенные в зоне каждой ячейки на вертикальных стойках стеллажей 2. (фиг.2).
Кран-штабелер работает следующим образом.
Доставка груза вовнутрь стеллажей 2 или, наоборот, вывоз груза произ5 водится загрузочной тележкой 4. Груз, доставляемый вовнутрь приемной ячей- ки стеллажа 2, принимается грузозахва- 0 расположенньй на верхней полке нап- равляющих 19 приемной ячейки, вкаты-
водится загрузочной тележкой 4. Груз, доставляемый вовнутрь приемной ячей- ки стеллажа 2, принимается грузозахва- расположенньй на верхней полке нап- равляющих 19 приемной ячейки, вкаты-
тным механизмом 10 платформы 9 крана-штабелера 1, для чего под груз,.
водится загрузочной тележкой 4. Груз доставляемый вовнутрь приемной ячей- ки стеллажа 2, принимается грузозахва расположенньй на верхней полке нап- равляющих 19 приемной ячейки, вкаты-
поднимается над направляющими 19 и затем переносится грузонесущим оргавается грузонесущий орган 16 грузозахватного механизма 10. Включением грузоподъемного механизма 18 груз
ками с направляющих 17 на направляю- щие 19 и наоборот по их нижним пол- наматываются канаты 15, заставляя перемещаться вверх раму 7 по верти-
кам.
Включением привода 13 приводится во вращение барабан 14, на которьй
ками с направляющих 17 на направляю- щие 19 и наоборот по их нижним пол- наматываются канаты 15, заставляя перемещаться вверх раму 7 по верти-
кальным направляющим 6 приводной тележки 5 крана-штабелера 1 и связанную с ними тягами 8 платформу 9. Подъем производится до положения, когда элементы 23 поднимутся над искомым горизонтальным рядом У-образ- ных ловителей 24 на величину, обеспечивающую беспрепятственный проход крана-штабелера 1 вдоль всего ряда стеллажей 2.
Перед началом горизонтального перемещения крана-штабелера 1 производится фиксац11я подъемной платформы 9, для чего электроуправляемый гидрораспределитель 21 отсекает поршневые полости гидроцилиндров 20 друг от друга и от гидробака 22. Затем включается привод 11, который приволера 1 следует расфиксация подъемной платформы 9 гидрораспределителем 21 и включением привода 13 производится посадка ее элементами 23 на У-образ- ные ловители 24 (фиг.4). Груз пере носится грузонесущим органом 16 в ячейку,, где устанавливается грузоподъемным механизмом 18 на направляющие 19.
Возвращается кран-штабелер 1 в исходное положение, повторяя все движения в обратном порядке.
Формула изобретения
Кран-штабелер, обслуживакнций стеллажи с V-образными ловителями, содержащий установленную в вертикальных . направляющих подъемно-опускную раму.
связанную с последней с возможностью перемещения в горизонтальной плоскости, грузонесущую платформу со штангой для взаимодействия с ловителем на стеллаже и приспособление ; для фиксации платформы в указанной плоскости, отличающийся тем, что, с целью упрощения конструкции, грузонесущая платформа подвешена к раме, приспособление для ее фиксации содержит размещенные под узлами подвеса перпендикулярно сторонам платформы, обращенным к вертикальным нап- равлд}ощим, силовые цилиндры, корпуса которьпс закреплены на противоположных сторонах рамы, а штоки соединены с противоположными сторонами платформы, при этом поршневые полости цилиндров сообщены между собой через управляемый распределитель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-накопительная система | 1989 |
|
SU1747352A1 |
| Кран-штабелер для длинномерных грузов | 1979 |
|
SU867818A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| ВЗССО'гОЗНАЯ | 1973 |
|
SU368153A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Транспортная складская система | 2016 |
|
RU2643615C2 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Склад для штучных грузов | 1973 |
|
SU590193A1 |
Изобретение относится к промыш- ленному транспорту. Цель изобретения - .упрощение конструкции. Кран - штабелер 1. имеет подвижную в вертикальной плоскости раму 7 с. грузонесущей платформой 9. Несущие стойки стеллажей 2 снабжены в зоне каждой ячейки У-об- разными ловителями 24, на которые . опирается при ориентации .платформа 9 своими элементами 23. Платформа 9 выполнена свободно подвешенной меаду элементами рамы 7, которая перемещается по направляющим 6 крана-штабёле- ра 1. Для фиксации от раскачивания платформы 9 служат два Г1вдроцилиндра 20, поршневые полости которых образуют сообщающиеся сосуды,.взаимно отсекаемые, гидрораспределителем. 5 ил. с S SuffA (П 00 К
./Ti 4-- VV
Г5 7
5-6
ш
11 48
77
Г8 16
Фиг.з
Viii4
77
- /r
ZJ
Г9
фиг.
I III
sj
ь
Составитель Г.Сарьгчева Редактор Т.Лазоренко Техред Л,Олийнык Корректор Л.Бескид
г f
Заказ 2923/24 Тираж 777Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.-4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Поршень для автоматического регулирования степени сжатия двигателя внутреннего сгорания | 1983 |
|
SU1213229A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
