Изобретение относится к машиностроению и может быть использовано в системах управления, например, подвижным столом металлорежущего станка.
Известно устройство программного управления ходом подвижного органа, содержащее закрепленную на подвижном органе плиту с пазами Т-образной формы на ее зеркале, которые направлены вдоль хода подвижного органа. В пазах, в соответствии с программой обработки, закреплены упоры, контактирующие рабочими гранями с
толкателями выключателей, неподвижно закрепленными на основании, по которому перемещается подвижный орган. Крепление упора к плите осуществляется только к зеркалу плиты, посредством полок Т-образного паза, скобы и двух винтов.
Недостатком данного устройства является то,то упоры своим корпусом не сори- ентированы вдоль пазов плиты и не прижаты к стенкам паза, что отрицательно сказывается на точности положения упора на гглите, производительности выставки упора и надежности его закрепления. Крепление упора к плите осуществляется двумя винтами, что вызывает многократную перестановку ключа от одного винта к другому, приводящую к потере производительности в наборе программы. Кроме того, плита с Т-образными пазами содержит меньше пазов, т.е. меньший обьем памятиТпо б равне- нию с плитой, имеющей прямоугольные пазы, при одинаковой их ширине, причем выполнение Т-образного паза трудоемко.
Известно устройство программного управления ходом подвижного органа, содержащее плиту с прямоугольными пазами, при этом упоры своим корпусом сбазированы и прижаты к одной из стенок паза с помощью рычага, шарика и двух винтов.
Недостатки этого устройства - те же, что и у предыдущего, с той разницей, что заменена базовая плоскость, к которой прижимается упор при зажиме, т.е. он прижимается к стенке паза, а не к зеркалу плиты. Таким образом, в обоих случаях наблюдается неполное базирование и зажим упора относительно плиты (следовательно и относительно направления хода подвижного органа), поскольку зажимное усилие направлено только в одну сторону.
Целью изобретения является повышение точности и улучшение эксплуатационных характеристик
Указанная цель достигается тем, что в устройство программного управления ходом подвижного органа, содержащем установленную на подвижном органе плиту с прямоугольными пазами, размещенными в них двуступенчатыми упорами с рабочими гранями и отверстиями в верхней и нижней ступенях, в одном из которых размещен элемент зажима с отверстием с фаской, а также зажимной винт с конической поверхностью, сопряженный с фаской элемента зажима, причем ось зажимного винта смещена относительно оси отверстия элемента зажима, нижняя ступень упора, выполненная в виде двугранного клина с вершиной, направленной ко дну паза плиты, снабжена прямоугольным пазом в центре клина.
перпендикулярным стенкам паза плиты, элемент зажима выполнен в виде цилиндра, размещенного в отверстии верхней ступени упора, переходящего в нижнюю часть прямоугольной формы, размещенной средней частью в прямоугольном пазу клина упора, причем в цилиндрической части элемента зажима выполнено продольное отверстие, ось которого параллельна оси отверстия в
0 верхней ступени упора и смещена вниз относительно нее в плоскости, перпендикулярной зеркалу плиты, при этом продольное отверстие переходит в сквозную прорезь, выполненную параллельно стенкам паза, и
5 делит элемент зажима в его нижней части на две лапки, имеющие с внутренней стороны скосы, которыми они сопряжены с гранями клина нижней ступени упора, а противоположными сторонами - со стенками паза, в
0 продольном отверстии элемента зажима и отверстиях верхней ступени упора размещен зажимной винт, связанный одним из концов с гайкой, также размещенной в отверстии верхней ступени упора, причем гай5 «а и винт размещены с возможностью взаимного перемещения в осевом направлении вдоль отйерстия верхней ступениупо- , ра.
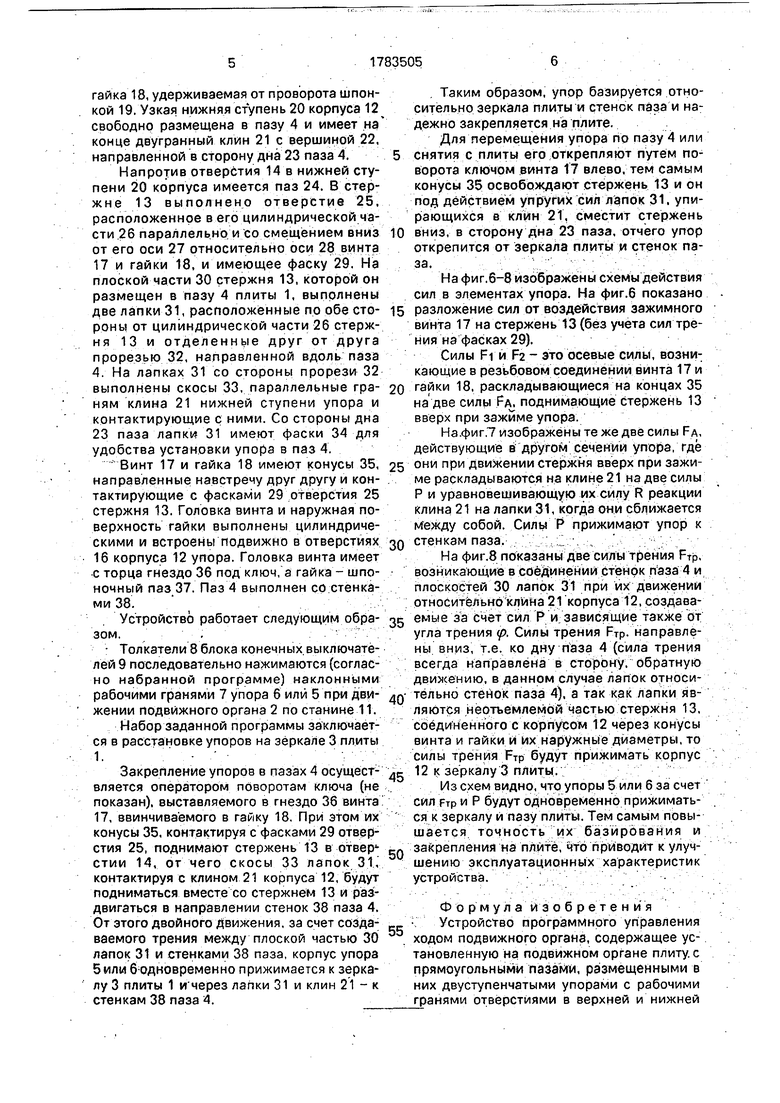
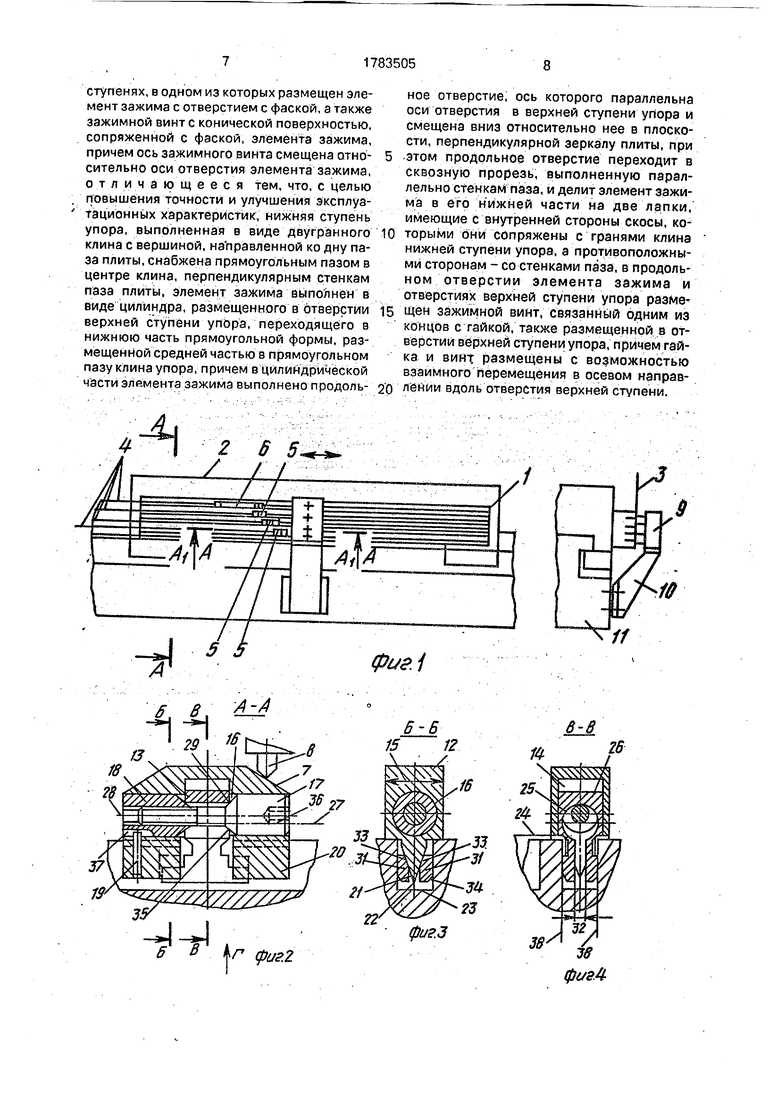
На фиг.1 показано предлагаемое уст0 ройство, вид спереди и сбоку, на фиг.2 - разрез А-А на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг 2; на фиг,5 - вид Г на фиг.2; на фиг,6 - схема расположения сщ
5 действующих в сечении А-А, без учета сил трения; на фиг.7 - то же, в сечении Б-Б; на фиг.8 - то же, в сечении В-В с учетом сил трения.
Устройство программного управления
Q ходом подвижного органа содержит плиту 1, закрепленную на подвижном органе 2. На зеркале 3 плиты имеются прямоугольные пазы 4, в которых размещены короткие упоры 5 и длинные упоры 6 с рабочими гранями
с 7. С этими гранями взаимодействуют толкатели 8 конечных выключателей, объединен- ных в блок 9, установленный через кронштейн 10 на станине 11.
В двухступенчатом корпусе 12 упоров 5
„ или 6 (в зависимости от их длины) содержится один или два зажимных элемента в виде стержня 13. В упоре 5 стержень 13 расположен в отверстии 14 по середине длины корпуса упора, а в упоре 6 - по обоим краям. Отверстие 14 выполнено в широкой, относительно паза 4, верхней ступени 15 корпуса 12 перпендикулярно зеркалу плиты 1. В двух других соосных отверстиях 16 перпендикулярных отверстию 14, расположены зажимной винт 17 с конической поверхностью и
5
гайка 18, удерживаемая от проворота шпонкой 19. Узкая нижняя ступень 20 корпуса 12 свободно размещена в пазу 4 и имеет на конце двугранный клин 21 с вершиной 22, направленной в сторону дна 23 паза А.
Напротив отверстия 14 в нижней ступени 20 корпуса имеется паз 24. В стер- жне 13 выполнено отверстие 25, расположенное в его цилиндрической части 26 параллельно и со смещением вниз от его оси 27 относительно оси 28 винта 17 и гайки 18, и имеющее фаску 29. На плоской части 30 стержня 13, которой он размещен в пазу 4 плиты 1, выполнены две лапки 31, расположенные по обе стороны от цилиндрической части 26 стержня 13 и отделенные друг от друга прорезью 32, направленной вдоль паза 4. На лапках 31 со стороны прорези 32 выполнены скосы 33, параллельные граням клина 21 нижней ступени упора и контактирующие с ними. Со стороны дна 23 паза лапки 31 имеют фаски 34 для удобства установки упора в паз 4.
Винт 17 и гайка 18 имеют конусы 35, направленные навстречу друг другу и контактирующие с фасками 29 отверстия 25 стержня 13. Головка винта и наружная поверхность гайки выполнены цилиндрическими и встроены подвижно в отверстиях 16 корпуса 12 упора. Головка винта имеет с торца гнездо 36 под ключ, а гайка - шпоночный паз 37. Паз 4 выполнен со стенками 38.
Устройство работает следующим образом.
Толкатели 8 блока конечных выключателей 9 последовательно нажимаются (согласно набранной программе) наклонными рабочими гранями 7 упора 6 или 5 при движении подвижного органа 2 по станине 11.
Набор заданной программы заключается в расстановке упоров на зеркале 3 плиты 1.
Закрепление упоров в пазах 4 осуществляется оператором поворотам ключа (не показан), выставляемого в гнездо 36 винта 17, ввинчиваемого в гайку 18, При этом их конусы 35, контактируя с фасками 29 отверстия 25, поднимают стержень 13 в отвер1- стии 14, от чего скосы 33 лапок 31, контактируя с клином 21 корпуса 12, будут подниматься вместе со стержнем 13 и раздвигаться в направлении стенок 38 паза 4. От этого двойного движения, за счет создаваемого трения между плоской частью 30 лапок 31 и стенками 38 паза, корпус упора 5 или 6 одновременно прижимается к зеркалу 3 плиты 1 и через лапки 31 и клин 21 - к стенкам 38 паза 4.
Таким образом, упор базируется относительно зеркала плиты и стенок паза и надежно закрепляется на плите.
Для перемещения упора по пазу 4 или
5 снятия с плиты его открепляют путем поворота ключом винта 17 влево, тем самым конусы 35 освобождают стержень 13 и он под действием упругих сил лапок 31. упирающихся в клин 21, сместит стержень
0 вниз, в сторону дна 23 паза, отчего упор открепится от зеркала плиты и стенок паза.
На фиг.6-8 изображены схемы действия сил в элементах упора. На фиг.б показано
5 разложение сил от воздействия зажимного винта 17 на стержень 13 (без учета сил трения на фасках 29).
Силы FI и Fa - это осевые силы, возникающие в резьбовом соединении винта 17 и
0 гайки 18, раскладывающиеся на концах 35 на две силы FA, поднимающие стержень 13 вверх при зажиме упора.
На.фиг.7 изображены те же две силы Гд, действующие в другом сечении упора, где
5 они при движении стержня вверх при зажиме раскладываются на клине 21 на две силы Р и уравновешивающую их силу R реакции клина 21 на лапки 31, когда они сближается между собой. Силы Р прижимают упор к
0 стенкам паза.
На фиг.8 показаны две силы трения FTp, возникающие в соединении стенок паза 4 и плоскостей 30 лапок 31 при их движении относительно клина 21 корпуса 12,создава5 емые за счет сил Р и зависящие также от угла трения р. Силы трения FTp. направлены вниз, т.е. ко дну паза 4 (сила трения всегда направлена в сторону, обратную движению, в данном случае лапок относи0 тельно стенок паза 4), а так как лапки являются неотъемлемой частью стержня 13, соединенного с корпусом 12 через конусы винта и гайки и их наружные диаметры, то силы трения FTp будут прижимать корпус
5 12 к зеркалу 3 плиты.
Из схем видно, что упоры 5 или 6 за счет сил ртр и Р будут одновременно прижиматься к зеркалу и пазу плиты. Тем самым повышается точность их базирования и
л закрепления на плите, что приводит к улучшению эксплуатационных характеристик устройства.
Формула изобретения Устройство программного управления ходом подвижного органа, содержащее установленную на подвижном органе плиту, с прямоугольными пазами, размещенными в них двуступенчатыми упорами с рабочими гранями отверстиями в верхней и нижней
ступенях, в одном из которых размещен элемент зажима с отверстием с фаской, а также зажимной винт с конической поверхностью, сопряженной с фаской, элемента зажима, причем ось зажимного винта смещена относительно оси отверстия элемента зажима, отличающееся тем, что, с целью повышения точности и улучшения эксплуатационных характеристик, нижняя ступень упора, выполненная в виде двугранного клина с вершиной, направленной ко дну паза плиты, снабжена прямоугольным пазом в центре клина, перпендикулярным стенкам паза плиты, элемент зажима выполнен в виде цилиндра, размещенного в отверстии верхней ступени упора, переходящего в нижнюю часть прямоугольной формы, размещенной средней частью в прямоугольном пазу клина упора, причем в цилиндрической части элемента зажима выполнено продольное отверстие, ось которого параллельна оси отверстия в верхней ступени упора и смещена вниз относительно нее в плоскости, перпендикулярной зеркалу плиты, при
этом продольное отверстие переходит в сквозную прорезь, выполненную параллельно стенкам паза, и делит элемент зажима в его нижней части на две лапки, имеющие с внутренней стороны скосы, которыми они сопряжены с гранями клина нижней ступени упора, а противоположными сторонам - со стенками паза, в продольном отверстии элемента зажима и отверстиях верхней ступени упора размещен зажимной винт, связанный одним из концов с гайкой, также размещенной в отверстии верхней ступени упора, причем гайка и винт размещены с возможностью взаимного перемещения в осевом направлейии вдоль отверстия верхней ступени.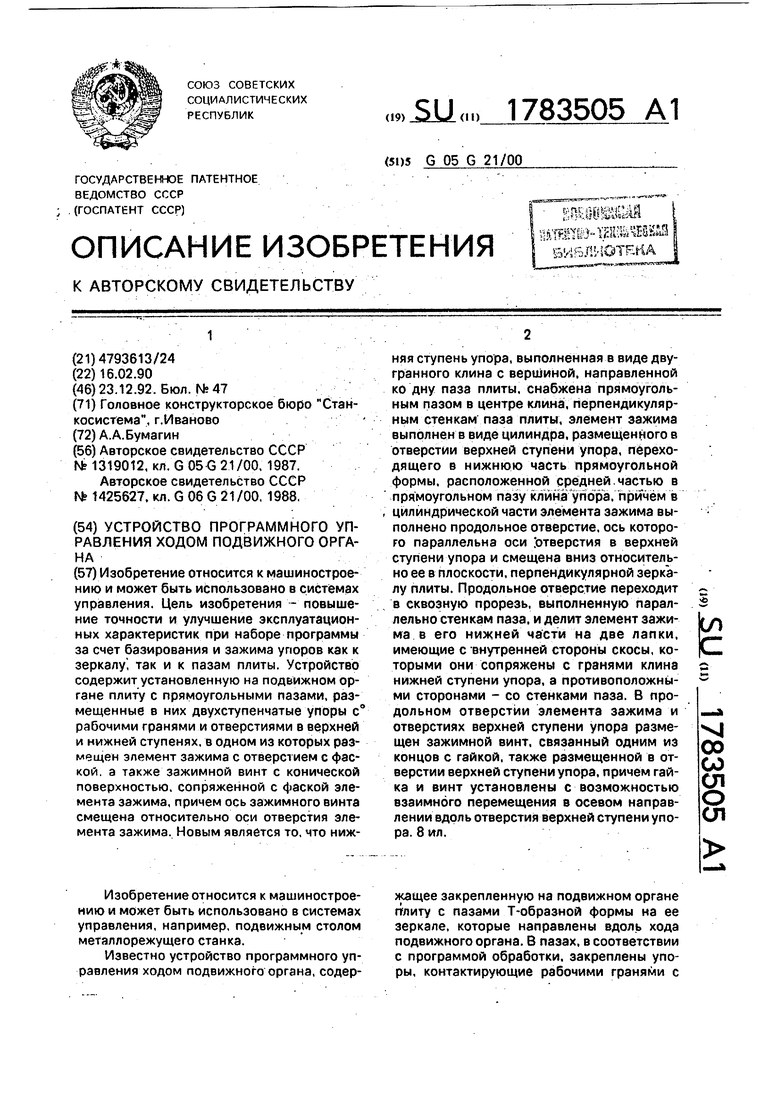

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления ходом подвижного органа | 1990 |
|
SU1817082A1 |
| Устройство программного управления ходом подвижного органа | 1989 |
|
SU1730613A1 |
| Устройство программного управления ходом подвижного органа | 1988 |
|
SU1647547A1 |
| Устройство программного управления ходом подвижного органа | 1986 |
|
SU1425627A1 |
| СБОРОЧНАЯ СИСТЕМА | 2008 |
|
RU2466303C2 |
| РАБОЧИЙ ОРГАН ГЛУБОКОРЫХЛИТЕЛЯ | 2017 |
|
RU2679035C2 |
| УСТАНОВКА ДЛЯ ВЫРЕЗКИ ДЕТАЛЕЙ ИЗ АРМИРОВАННОЙ ЗАГОТОВКИ | 2003 |
|
RU2248876C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1983 |
|
SU1125082A1 |
| Устройство для закрепления деталей | 1981 |
|
SU1038174A1 |
| Линия для динамической балансировки роторов электродвигателей | 1987 |
|
SU1490521A1 |
Изобретение относится к машиностроению и может быть использовано в системах управления. Цель изобретения - повышение точности и улучшение эксплуатационных характеристик при наборе программы за счет базирования и зажима упоров как к зеркалу , так и к пазам плиты. Устройство содержит установленную на подвижном органе плиту с прямоугольными пазами, размещенные в них двухступенчатые упоры с° рабочими гранями и отверстиями в верхней и нижней ступенях, в одном из которых размещен элемент зажима с отверстием с фаской, а также зажимной винт с конической поверхностью, сопряженной с фаской элемента зажима, причем ось зажимного винта смещена относительно оси отверстия элемента зажима. Новым является то, что нижняя ступень упора, выполненная в виде двугранного клина с вершиной, направленной ко дну паза плиты, снабжена прямоугольным пазом в центре клина, перпендикулярным стенкам паза плиты, элемент зажима выполнен в виде цилиндра, размещенного в отверстии верхней ступени упора, переходящего в нижнюю часть прямоугольной формы, расположенной средней частью в прямоугольном пазу клина упора, причем в , цилиндрической части элемента зажима выполнено продольное отверстие, ось которого параллельна оси Тотверстия в верхней ступени упора и смещена вниз относительно ее в плоскости, перпендикулярной зеркалу плиты. Продольное отверстие переходит в сквозную прорезь, выполненную параллельно стенкам паза, и делит элемент зажима в его нижней части на две лапки, имеющие с внутренней стороны скосы, которыми они сопряжены с гранями клина нижней ступени упора, а противоположными сторонами - со стенками паза. В продольном отверстии элемента зажима и отверстиях верхней ступени упора размещен зажимной винт, связанный одним из концов с гайкой, также размещенной в отверстии верхней ступени упора, причем гайка и винт установлены с возможностью взаимного перемещения в осевом направлении вдоль отверстия верхней ступени упора. 8 ил. ч-Ё VI 00 СО СЛ О СЛ
т
/
I )П
А-А
2ZZZ ZZZZZ
& В kr фиг2
/
фиг.1
6-8
фигЗ
ви&Г 24
т
ш:
фиг 6
30 У
-
1
20
X
(рсгг.5
30
Р
| Устройство для программного управления ходом подвижного органа | 1986 |
|
SU1319012A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство программного управления ходом подвижного органа | 1986 |
|
SU1425627A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
