/ ШШЙШШ 1
Фиг1
Изобретение относится к области подъемно-транспортного оборудования, а именно к устройствам для нагружения кранов при статических испытаниях без включения крановых механизмов, применяемых, в частности, при контроле прочности металлических конструкций кранов- акустико-эмиссионным методом.
Известны устройстёа для испытания грузопЬдъемНых кранов без включения кра- новых м« хаШэмов, Устройство состоит из тележк и eg встроенным электромагнитом, установленной на ферромагнитном листе Тележка через динамометр соединена с крюком крана и при подаче напряжения на электромагнит нагружает грузовой канат, Нагружение в устройстее осуществляется лебедкой, закрепленной в пазу неподвижного основания
Недостатками этих устройств являются невозможность обеспечения плавного дозированного нагружения, ограниченные эксплуатационные возможности вследствие стационарности установки и наличия постоянного источника энергии, при работе которого возникают электромагнитные и акустические поля, затрудняющие контроль прочности металлических конструкций кранов акустико-эмиссионным методом, являющимся в настоящее время единственным, позволяющим выявить увеличивающиеся дефекты (трещины, очаги пластичности и т.п.) под действием приложенной к конструкции нагрузки.
Наиболее близким к предлагаемому является нагружающее устройство для статических испытаний грузоподъемных кранов, содержащее основной груз, расположенный над ним, и кинематически связанный с ним вспомогательный груз и элемент для навешивания на крюк крана
В этом устройстве (наборнь.й груз) на- гружение металлоконструкции крана производится с помощью крановых подъемных механизмов, при этом не обеспечивается регулирование скорости изменения и величины испытательной статической нагрузки (нагрузка изменяется дискретно, т к. вначале с помощью крановых механизмов поднимают основной груз, а затем зацепленный с последним вспомогательный) Вследствие работы крановых механизмов возникают акустические поля, затрудняющие контроль прочности металлоконструкций кранов акустико-эмиссионным методом. При отключенных крановых механизмах это устройство не обеспечивает дозированного изменения величины испытательной статической нагрузки и не позволяет регулировать скорость изменения испытательной
статической нагрузки по величине Таким образом, известное устройство обладает ограниченными эксплуатационными возможностями.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения бесступенчатого дозированного изменения нагрузки с заданной скоростью. Для достижения указанной цели нагру0 жающее устройство для статических испытаний грузоподъемных кранов, содержащее основной груз, расположенный над ним, и кинематически связанный с ним вспомогательный груз и элемент для навешивания на
5 крюк крана, снабжено траверсой, на которой закреплен элемент для навешивания на крюк крана, а кинематическая связь содержит соединенный с траверсой своими элементами преобразователь усилия, гибкие
0 связи для соединения основного и вспомогательного грузов с элементами преобразователя усилия и устройство для регулирования скорости перемещения грузов и фиксации их положения.
5 Кроме того, поставленная цель достигается за счет использования частных признаков, таких, как:
преобразователь усилия включает в себя шарнирно закрепленный на траверсе по
0 оси ее симметрии балансир и симметрично расположенный относительно вертикальной оси траверсы сдвоенный полиспаст, ось блоков неподвижной обоймы которого закреплена на траверсе, а устройство для ре5 гулирования скорости перемещения грузов и фиксации их положения содержит размещенный между траверсой и вспомогательным грузом вертикально расположенный по оси симметрии траверсы гидроцилиндр, ре0 гулируемый дроссель и вентиль, через которые сообщены между собой полости гидроцилиндра, при этом подвижные части гидроцилиндра связаны с траверсой и подвижной обоймой полиспаста, к которой по5 средством соответствующей гибкой связи подвешен основной груз, при этом другие гибкие связи представляют собой канаты полиспаста, запасованные на блоках последнего, которые закреплены одними сво0 ими концами на плечах балансира, а другими - на вспомогательном грузе;
преобразователь усилия выполнен в виде полиспаста, ось с блоками неподвижной обоймы которого закреплена на траверсе, а
5 к оси с блоками подвижной обоймы посредством соответствующей гибкой связи подвешен основной груз, причем другие гибкие связи выполнены в виде каната полиспаста, запасованного на его блоках и закрепленного своими концами на вспомогательном грузе. а устройство для регулирования скорости перемещения грузов и фиксации их положения выполнено в виде тормоза, который установлен на оси неподвижной обоймы полиспаста, при этом крайние блоки неподвижной обоймы полиспаста закреплены на оси жестко;
преобразователь усилия выполнен в виде двух связанных с траверсой своими осями поворота неравноплечих рычагов, которые размещены под траверсой симметрично относительно вертикальной оси траверсы, а устройство для регулирования скорости перемещения грузов и фиксации их положения содержит вертикально расположенный по оси симметрии траверсы и раз- мещенный между рычагами и вспомогательным грузом гидроцилиндр, регулируемый дроссель и вентиль, через которые сообщены между собой ,полости гидроцилиндра, причем одна из подвижных частей гидроцилиндра соединена с траверсой, а другая подвижная часть гидроцилиндра соединена соответственно посредством первых гибких связей с меньшими плечами рычагов и второй гибкой связью - с основным грузом, при этом к большим плечам рычагов посредством третьих гибких связей подвешен вспомогательный груз;
преобразователь усилия выполнен в виде трех вертикально расположенных гидроцилиндров, штоки которых шарнирно связаны с траверсой, при этом к корпусу среднего гидроцилиндра меньшего диаметра посредством соответствующей гибкой связи подвешен вспомогательный груз, а к корпусам крайних гидроцилиндров большего диаметра, которые жестко связаны между собой, посредством других гибких связей подвешен основной груз, причем одноименные полости гидроцилиндров сообщены между собой, а устройство для регулирования скорости перемещения грузов и фиксации их положения выполнено в виде регулируемого дросселя и вентиля, установленных последовательно в одной из линий связи одноименных полостей гидроцилиндров.
На фиг.1,2,3,4 схематично показано нагружающее устройство в рабочем положении, выполненное соответственно по первому, второму, третьему и четвертому вариантам.
Нагружающее устройство (фиг.1,2,3,4) для статических испытаний грузоподьем- ных кранов содержит траверсу 1 с элементом 2 для навешивания на крюк 3 крана. С траверсой 1 кинематически связаны основной 4 и вспомогательный 5 грузы Вспомогательный груз 5 имеет массу меньше, чем основной груз 4.
Кинематическая связь основного 4 и вспомогательного 5 грузов с траверсой 1. 5 обеспечивает возможность их взаимного вертикального перемещения друг относительно друга и относительно траверсы 1 с регулируемой скоростью. Кинематическая связь обеспечивает также возможность
0 фиксации положения грузов 4 и 5. Подъем основного груза 4 большей массы осуществляется за счет накопленной при подъеме потенциальной энергии вспомогательного груза 5 меньшей массы и за счет того, что
5 кинематическая связь содержит преобразователь усилия. Основной 4 и вспомогательный 5 грузы связаны с элементами преобразователя усилия с помощью гибких связей. Кинематическая связь также вклю0 чает в себя устройство для регулирования скорости перемещения грузов 4 и 5 и фиксации их положения.
В нагружающем устройстве по первому варианту (фиг.1) преобразователь усилия
5 включает в себя шарнирно закрепленный на траверсе 1 балансир 6 и симметрично расположенный относительно вертикальной оси симметрии сдвоенный полиспаст. Ось блоков 7 неподвижной обоймы полиспаста
0 закреплена на траверсе 1, а к оси с блоками 8 подвижной обоймы, полиспаста посредством гибкой связи 9 подвешен основной груз 4. Устройство для регулирования скорости перемещения грузов 4 и 5 и фиксации их
3 положения выполнено в виде гидроцилиндра 10 (гидротормоз), регулируемого дросселя 11 и вентиля 12, которые установлены в перепускном трубопроводе 13, сообщающем полости гидроцилиндра 10.
0Шток 14 гидроцилиндра 10 связан страверсой 1. Нижнее основание корпуса гидроцилиндра 10 связано с подвижной обоймой полиспаста.
Канаты 15 полиспаста, представляю5 щие собой другие гибкие связи, одними своими концами закреплены на балансире 6, а другими - на вспомогательном грузе 5 и ззпасованы на блоках 7,8 полиспаста. Во вспомогательном грузе 5 выполнено отвер0 стие 16, в которое проходит гибкая связь 9.
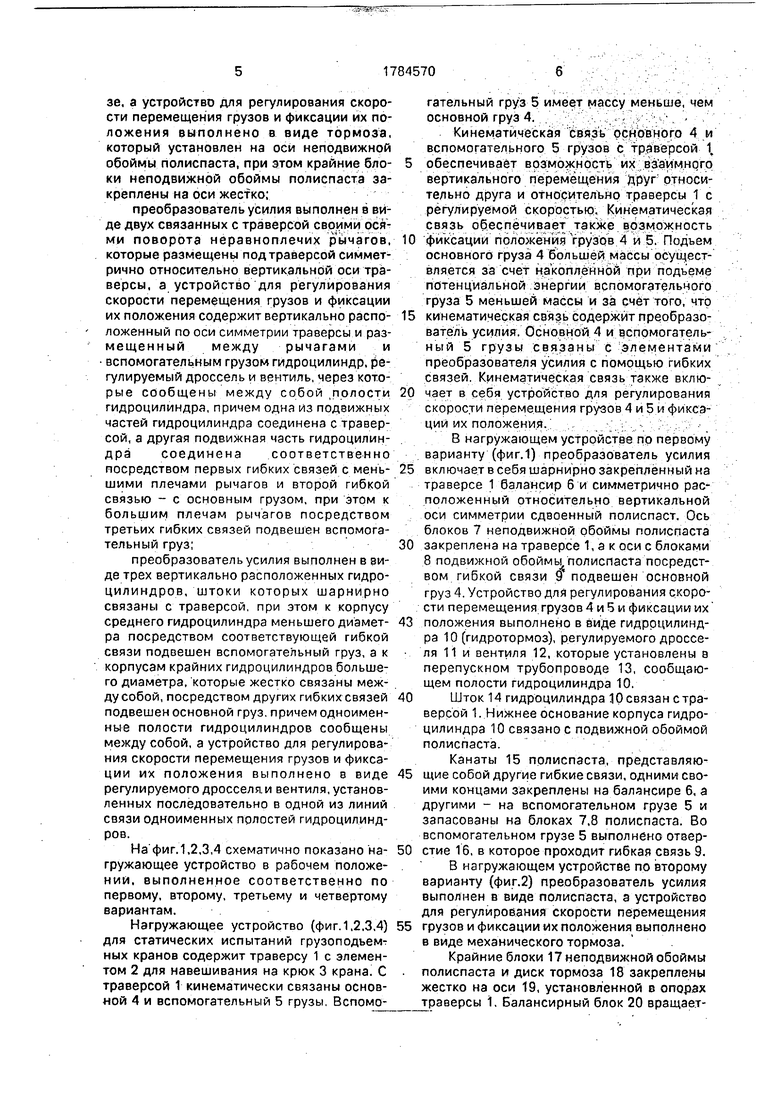
В нагружающем устройстве по второму
варианту (фиг.2) преобразователь усилия
выполнен в виде полиспаста, а устройство
для регулирования скорости перемещения
5 грузов и фиксации их положения выполнено в виде механического тормоза.
Крайние блоки 17 неподвижной обоймы
полиспаста и диск тормоза 18 закреплены жестко на оси 19, установленной в опорах траверсы 1. Балансирный блок 20 вращается на оси 19 свободно. К основанию блоков 21 подвижной обоймы подвешен на гибкой связи 22 основной груз 4. Канат 23 полиспаста, представляющий собой другие гибкие связи, обоими концами закреплен на вспомогательном грузе 5 и запасован на блоках 17,20,21 полиспаста. Во вспомогательном грузе 5 выполнено отверстие 24, в которое пропущена гибкая связь 22.
В нагружающем устройстве по третьему варианту (фиг.З) преобразователь усилия выполнен в виде двух неравноплечих рычагов 25. Неравноплечие рычаги 25 расположены под траверсой 1 симметрично относительно ее вертикальной оси и связаны с ней своими осями поворота. Меньшие плечи рычагов 25 соединены первыми гибкими связями 26 с нижней балкой 27, на которой закреплено нижнее основание корпуса гидроцилмндра 28. К нижней балке 27 посредством второй гибкой связи 29 подвешен основной груз 4. К большим плечам рычагов 25 посредством третьих гибких связей 30 подвешен вспомогательный груз 5 Вспомогательный груз 5 выполнен с отверстием 31 для гибкой связи 29 Гидроцилиндр 28 расположен вертикально по оси симметрии траверсы 1. Шток 32 гидроцилиндра 28 связан с траверсой 1. Перепускной трубопровод 33 с регулируемым дросселем 34 и вентилем 35 соединяет полости гидроцилиндра 28. Устройство для регулирования скорости перемещения грузов и фиксации их положения включает в себя гидроцилиндр 28 (гидротормоз), регулируемый дроссель 34 и вентиль 35.
В нагружающем устройстве по четвертому варианту (фиг 4) преобразователь усилия включает в себя три вертикально расположенных гидроцилиндра. Корпус среднего гидроцилиндра 36 меньшего диаметра соединен со вспомогательным грузом 5 гибкой связью 37, проходящей в отверстие 38 нижней балки 39. Корпусы двух других крайних гидроцилиндров 40 большего диаметра прикреплены к нижней балке 39, которая другими гибкими связями 41 соединена с основным грузом 4.
Нижняя балка 39 жестко связывает между собой корпуса крайних гидроцилиндров 40. Штоки 42,43 гидроцилиндров шар- нирно соединены траверсой 1.
Штоковые полости гидроцилиндров соединены между собой перепускным трубопроводом 44, снабженным регулируемым дросселем и вентилем 46, Поршневые полости гидроцилиндров соединены между собой перепускным трубопроводом 47. Регулируемый дроссель 45 и вентиль 46, последовательно установленные в линии связи (трубопроводе) 44, образуют устройство для регулирования скорости перемещения грузов 4 и 5 и фиксации их положения. Нагружающие устройства, изображенные на фиг. 1,3,4, снабжены приспособлениями для компенсации разницы объемов штоковых и поршневых полостей гидроцилиндров (на чертежах не показаны), т.к. при одинаковых перемещениях поршней штоковых и поршневых полостей гидроцилиндров вытесняются разные объемы жидкости. Устройства для компенсации разницы объемов выполнены в виде емкостей с рабочей жидкостью, присоединенных к соответствующим полостям гидроцилиндров.
Нагружающее устройство, изображенное на фиг.1, работает следующим образом; Вентиль 12 закрыт. С помощью грузоподъемного механизма крана поднимают
нагружающее устройство так, чтобы основной груз 4 оставался на земле и гибкая связь 9 не была бы натянута, а вспомогательный груз 5 был поднят. Затем отключают крановые механизмы и открывают вентиль 12.
При открытом вентиле 12 перепускного трубопровода жидкость вытесняется из над- поршневой полости в подпоршневую полость гидроцилиндра 10 со скоростью зависящей от размера отверстия регулируемого дросселя 11, вспомогательный груз 5 опускается, подвижная обойма с корпусом гидроцилиндрэ 10 поднимается, натягивая гибкую связь 9 вплоть до отрыва основного груза 4 от земли. Подъем основного груза 4
может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5.
Возврат нагружающего устройства в исходное положение осуществляется с помощью грузоподъемного механизма крана. Крюк 3 опускается до тех пор, пока грузы 4 и 5 не окажутся на земле, а гибкая связь 9 ц канаты 15 не получат достаточную слабину Под действием веса подвижной обоймы блоков 8 и гидроцилиндра 10 полиспаст растягивается до нужного размера. Затем вентиль 1$ перепускного трубопровода 13 перекрывается, и нагружающее устройство поднимаете краном в исходное полох ение.
Нагружающее устройство, изображен ное на фиг.2, работает следующим образом, Тормоз 18 закрыт. С помощью грузоподъемного механизма крана поднимают нагружающее устройство так, чтобы основной груз 4 оставался на земле и гибкая связь 22 не была бы натянута, а вспомогательный груз 5 был поднят. Затем отключают крановые механизмы и раскрывают тормоз 18. При раскрытом тормозе 18 вспомогательный груз 5 опускается, подвижная обойма полиспаста поднимается, натягивая гибкую связь 22 вплоть до отрыва основного груза 4 от земли Подъем основного груза 4 может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5.
Возврат нагружающего устройства в исходное положение осуществляется с помощью грузоподъемного механизма крана Крюк 3 опускается до тех пор, пока грузы 4 и 5 не окажутся на земле, а гибкая связь 22 и канат 23 не получат достаточную слабину Под действием веса подвижной обоймы блоков 21 полиспаст растягивается при открытом тормозе 18 до нужного размера Затем ось 19 затормаживается и нагружающее устройство поднимается краном в исходное положение.
Нагружающее устройство, изображенное на фиг 3, работает следующим образом
Вентиль 35 закрыт С помощью грузоподъемного механизма крана поднимают нагружающее устройство так, чтобы основной груз 4 оставался на земле и гибкая связь 29 не была бы натянута а вспомогательный груз 5 был поднят Затем отключают крановые механизмы и открывают вентиль 35
При открытом вентиле 35 перепускного трубопровода 33 жидкость вытесняется из надпоршневой полости в подпоршневую полость гидроцилиндра 28 со скоростью зависящей от размера отверстия регулируемого дросселя 34, вспомогательный груз 5 опускается, нижняя балка 27 поднимается натягивая гибкую связь 29 вплоть до отрыва основного груза 4 от земли Подъем основного груза 4 может продолжаться до тех пор пока он не придет в соприкосновение с вспомогательным грузом 5
Возвратиэгружающего устройства в исходное положение осуществляется с помощью грузоподъемного механизма крана Крюк 3 опускается до тех пор пока грузы 4 и 5 не окажутся на земле а гибкие связи 26 и 30 не получат достаточной слабины Под действием веса нижней балки 27 и гидроцилиндра 28 произойдет выдвижение штока 32 на нужную длину Затем вентиль 35 перепускного трубопровода 33 перекрывается и нагружающее устройство поднимается краном в исходное положение
Нагружающее устройство изображенное на фиг,2, работает следующим образом.
Вентиль 46 закрыт С помощью грузоподъемного механизма крана поднимают нагружающее устройство так, чтобы основ- ной груз 4 оставался на землей гибкие связи 41 не были бы натянуты а вспомогательный груз 5 был поднят. Затем отключают крановые механизмы и открывают вентиль 4б.
При открытом вентиле 46 перепускного тр убопровода 44 жидкость вытесняется из штоковой полости среднего гидроцилиндра 36 в штоковые полости крайних гидроцилиндров 40. При этом вспомогательный груз 5 опускается, а нижняя балка 39 поднимается, натягивая гибкие связи 41 вплоть до отрыва основного груза 4 от земли Жидкость из поршневых полостей крайних гидроци0 линдров 40 по перепускному трубопроводу 47 вытесняется в поршневую полость среднего гидроцилиндра 36 Скорость подъема нижней балки 39 зависит от размера отверстия регулируемого дросселя 45 в перепуск5 ном трубопроводе 44 Подъем основного груза 4 может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5
Возврат нагружающего устройства в ис0 ходное положение осуществляется с помощью грузоподъемного механизма крана. Крюк 3 опускается до тех пор, пока грузы 4 и 5 не окажутся на земле, а гибкие связи 37 и 41 не получат достаточной слабины Вен5 тиль 46 открыт Под действием веса нижней балки 39 гидроцилиндров 36 и 40 произойдет выдвижение штоков 42,43 на нужную длину Затем вентиль 46 перепускного трубопровода 44 перекрывается и нагружающее устрой0 ство поднимается краном в исходное положение Кратность полиспаста в устройстве (фиг 1 2) соотношения плеч рычагов (фиг 3) и соотношения диаметров в устройстве (фиг 4} выбираются такими, чтобы обеспечить
5 подъем основного груза большей массы за счет потенциальной энергии вспомогательного груза меньшей массы
Формула изобретения Устройство нагружения металлоконст0 рукции крана содержащее основной груз, расположенный над ним и кинематически связанный с ним вспомогательный груз и элемент для навешивания на крюк крана, отличающееся тем, что, с целью
5 расширения эксплуатационных возможностей путем обеспечения бесступен .этого изменения нагрузки с заданной скоростью без включения механизмов крана, оно снабжено траверсой, на которой закреплен эле0 мент для навешивания на крюк крана, а указанная кинематическая связь включает в себя гибкую тягу, преобразователь усилмя. выполненный в виде закрепленного на траверсе по оси ее симметрии балансира и сим5 метрично расположенного относительно вертикальной оси траверсы сдвоенного полиспаста, ось блоков неподвижной обоймы которого закреплена на траверсе, и устройство для регулирования скорости перемещения грузов и фиксации их положения.
выполненное в виде размещенного между траверсой и вспомогательным грузом вертикально расположенного по оси симметрии траверсы гидроцилиндра с регулируемым дросселем и вентилем, через которые сообщены между собой полости гидроцилиндра, при этом подвижные части
гидроцилиндра связаны с траверсой и с подвижной обоймой полиспаста, к которой посредством гибкой тяги подвешен основной груз, а канаты полиспаста, эапасованные на его блоках, закреплены одними концами на плечах балансира, а другими - на вспомогательном грузе.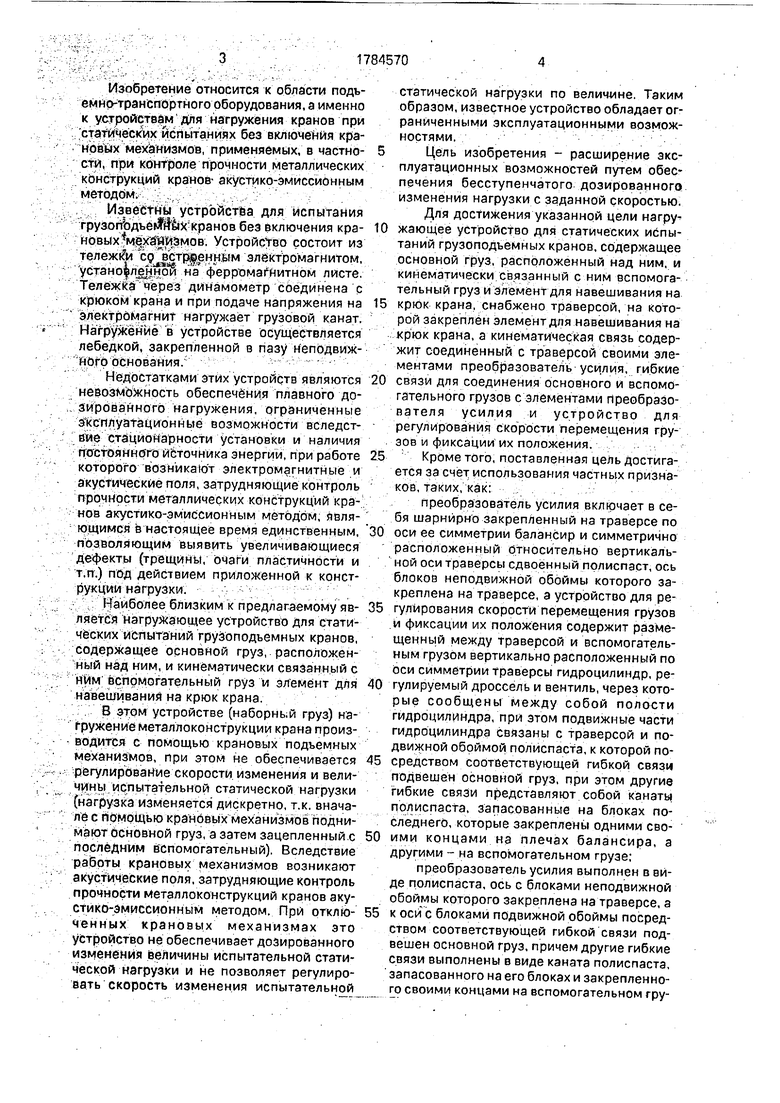


| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Устройство для обслуживания внутренних частей зданий | 1984 |
|
SU1194823A1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| КРАНОВОЕ УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК ПРИ ПОДЪЕМЕ И ПОСАДКЕ ГРУЗА | 1969 |
|
SU253332A1 |
| Башенный кран | 1988 |
|
SU1595785A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Способ производства такелажных работ несколькими грузоподъемными средствами и устройство для его осуществления | 1982 |
|
SU1092140A1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОВЫБРОСОВОГО ОБОРУДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2161691C2 |
| Устройство для мягкой посадки груза | 1971 |
|
SU458504A1 |
| Крюковая крановая подвеска | 1980 |
|
SU893800A1 |


Использование: подъемно-транспортное оборудование. Сущность: устройство нагружения металлоконструкции крана содержит траверсу 1, на которой закреплен элемент 2 для навешивания на крюк 3 крана, сдвоенный полиспаст, ось блоков 7 неподвижной обоймы которого закреплена на траверсе 1, блоки 8 подвижной обоймы соединены с корпусом гидроцилиндра 10, полости которого сообщены между собой посредством регулируемого дросселя 11, а шток 14 соединен с траверсой 1, основной груз 4, подвешенный на подвижной обойме указанного полиспаста, вспомогательный груз 5, соединенный с одними концами канатов 15 полиспаста, и смонтированный на траверсе 1 балансир 6, на плечах которого закреплены канаты 15 другими своими концами, 4 ил.
3
-2
Ј2/.
//
Фиг.2
/
25
4
f7/////7//////////
Шиаз
V,
ФиъЛ
| Устройство для испытания крана | 1978 |
|
SU670847A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для нагружения стрелового крана | 1978 |
|
SU821391A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Наборный груз | 1987 |
|
SU1418276A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
