Изобретение относится к управлению, подъемно-транспортными машинами, а именно к способам управления грузовыми тележками с „грузозахватными органами на гибком подвесе.
Цель изобретения - повышение надежно сти
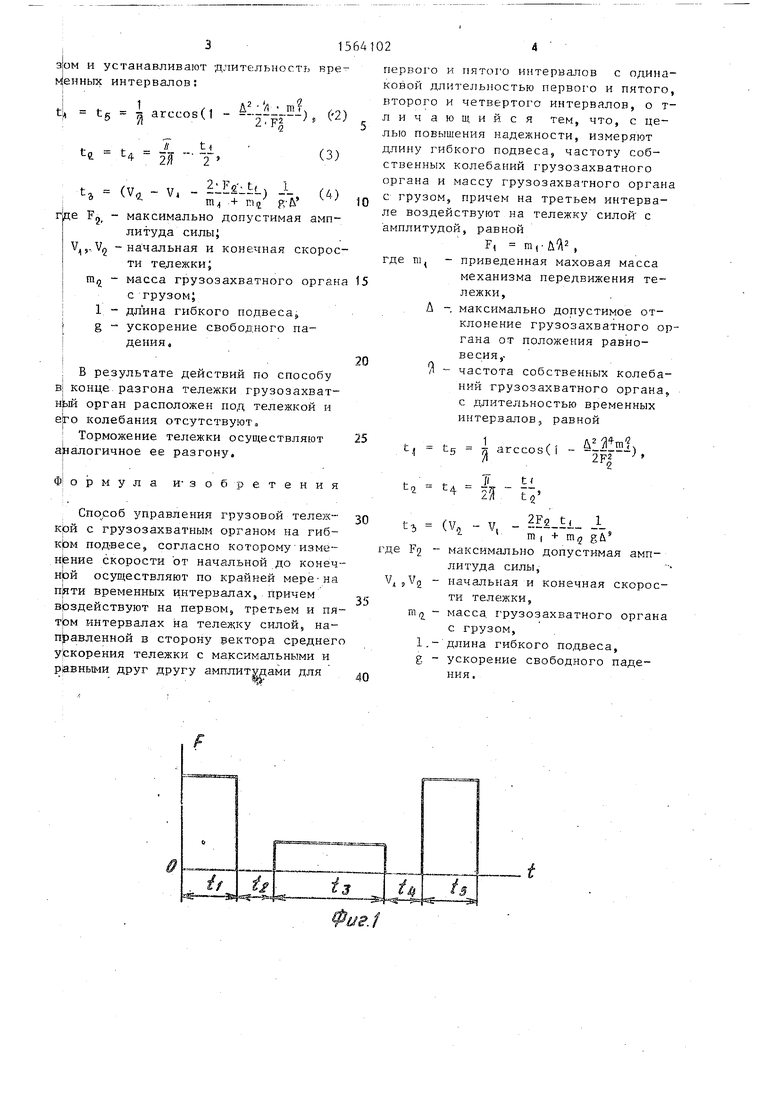
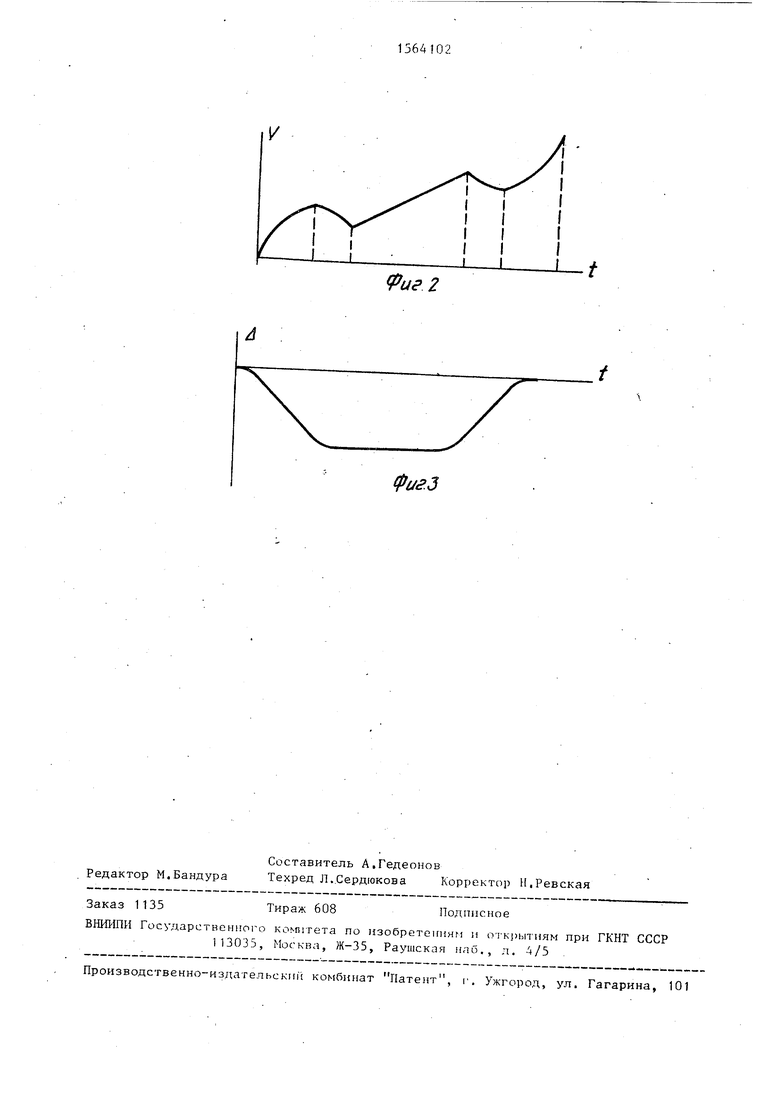
На фиг.1 показа ны при разгоне тележки графики зависимости во времени силы, действующей на тележку на фиг.2 - то же, скорости тележки на фиг.З - то же, отклонения грузозахватного органа от положения равновесия.
Согласно способу управления при разгоне тележки, изменение ее скорости осуществляют на пяти временных интервалах. На первом, третьем и пятом интервалах воздействуют на тележку силой, направленной в сторону вектора среднего ускорения тележки. На первом и пятом интервалах амплитуда силы принимается максимальной, а на третьем равна
F, тгД-Я;
О)
ел
О5 Ј
О
где пц - приведенная маховая масса механизма передвижения те- лежкп
Д - максимально допустимое отклонение грузозахватного органа от положения равновесия, Я - частота собственных колебаний грузозахватного органа. Измеряют длину гибкого подвеса и массу грузозахватного органа с
зом и устанавливают -длительность временных интервалов:
, te -я arccos(1
2 .,
А
т
Я
2 F
2Я
U
2 ,
- - (г и lEЈ l L L - (Va V т, + и/ gb
)s ( 2) (3) (4)
где F2 - максимально допустимая амплитуда силы;
V1S. VQ -начальная и конечная скорости тележки; { т - масса грузозахватного оргзна
с грузом;
1 - длина гибкого подвеса,, ( g - ускорение свободного падения,
В результате действий по способу в конце разгона тележки грузозахват- н|ый орган расположен под тележкой и его колебания отсутствуют,
Торможение тележки осуществляют аналогичное ее разгону.
Формула и зобаетения
Способ управления грузовой тележкой с грузозахватным органом на гиб- к|ом под-весе, согласно которому изменение скорости от начальной до конеч- нЬй осуществляют по крайней мере на временных интервалах, причем воздействуют на первом, третьем и пятом интервалах на тележку силой, направленной в сторону вектора среднего ускорения тележки с максимальными и
равными друг другу амплитудами для
«$
5
0
первого и пятого интервалов с одинаковой длительностью первого и пятого, второго и четвертого интервалов, о т- личающийся тем, что, с целью повышения надежности, измеряют длину гибкого подвеса, частоту собственных колебаний грузозахватного органа и массу грузозахватного органа с грузом, причем на третьем интервале воздействуют на тележку силой с амплитудой, равной
F, mrufl2 ,
где т - приведенная маховая масса механизма передвижения те- лежки,
А - максимально допустимое отклонение грузозахватного органа от положения равновесия,И - частота собственных колебаний грузозахватного органа, с длительностью временных интервалов, равной
1
t0 n arccos((
2F|
-),
ta t4
I 2ft
tt t
.- v - JL
1 m , + gu
ti, (Vu
где Fg - максимально допустимая амплитуда силы,
а начальная и конечная скорости тележки, т - масса грузозахватного органа
с грузом,
1,- длина гибкого подвеса, g - ускорение свободного падения.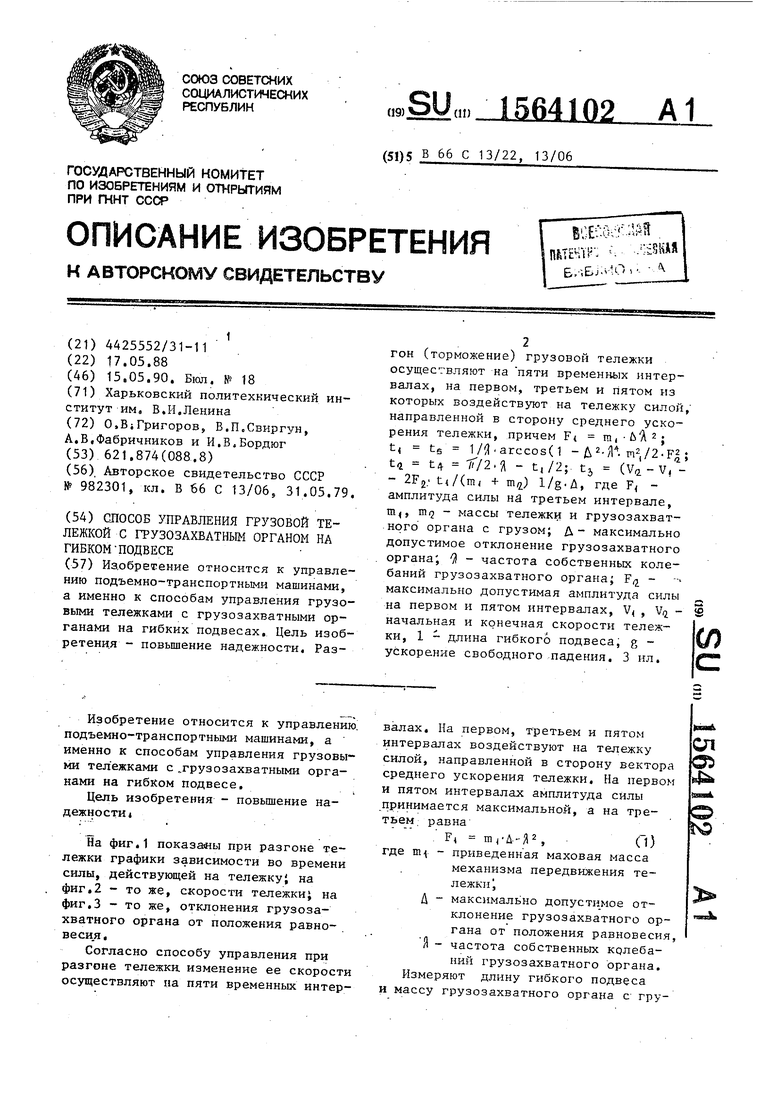
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления грузовой тележкой с гибким подвесом груза | 1988 |
|
SU1654243A1 |
| Способ адаптивного управления мостовым краном | 2020 |
|
RU2744647C1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для гашения колебаний грузозахватного органа крана | 1978 |
|
SU753778A1 |
Изобретение относится к управлению подъемно-транспортными машинами, а именно к способам управления грузовыми тележками с грузозахватными органами на гибких подвесах. Цель изобретения - повышение надежности. Разгон (торможение) грузовой тележки осуществляют на пяти временных интервалах, на первом, третьем и пятом из которых воздействуют на тележку силой, направленной в сторону среднего ускорения тележки, причем F1=M1.Δ.λ2
T1=T5=1/λ.ARC COS (1-Δ2.λ4.M2/2.F2
T2=T4=*8п/2.λ-T1/2
T3=(V2-V1-2F2.T1/M1+M2).L/G.Δ, где F1 - амплитуда силы на третьем интервале
M1,M2 - массы тележки и грузозахватного органа с грузом
Δ - максимально допустимое отклонение грузозахватного органа
λ - частота собственных колебаний грузозахватного органа
F2 - максимально допустимая амплитуда силы на первом и пятом интервалах
V1,V2 - начальная и конечная скорости тележки
L - длина гибкого подвеса
G - ускорение свободного падения. 3 ил.
фиг.1
Фиг 2
фигЗ
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа подъемно-транспортного средства | 1979 |
|
SU982301A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
