112
Изобретение относится к автоматическому измерению эксплуатационных параметров экскаватора-драглайна при выполнении вскрьппных бестранспортных работ и, в частности, предназначается для контроля положения ковша в плоскости стрелы.
Цель изобретения - упрощение и повьшение надежности определения опасной зоны нахождения ковша.,
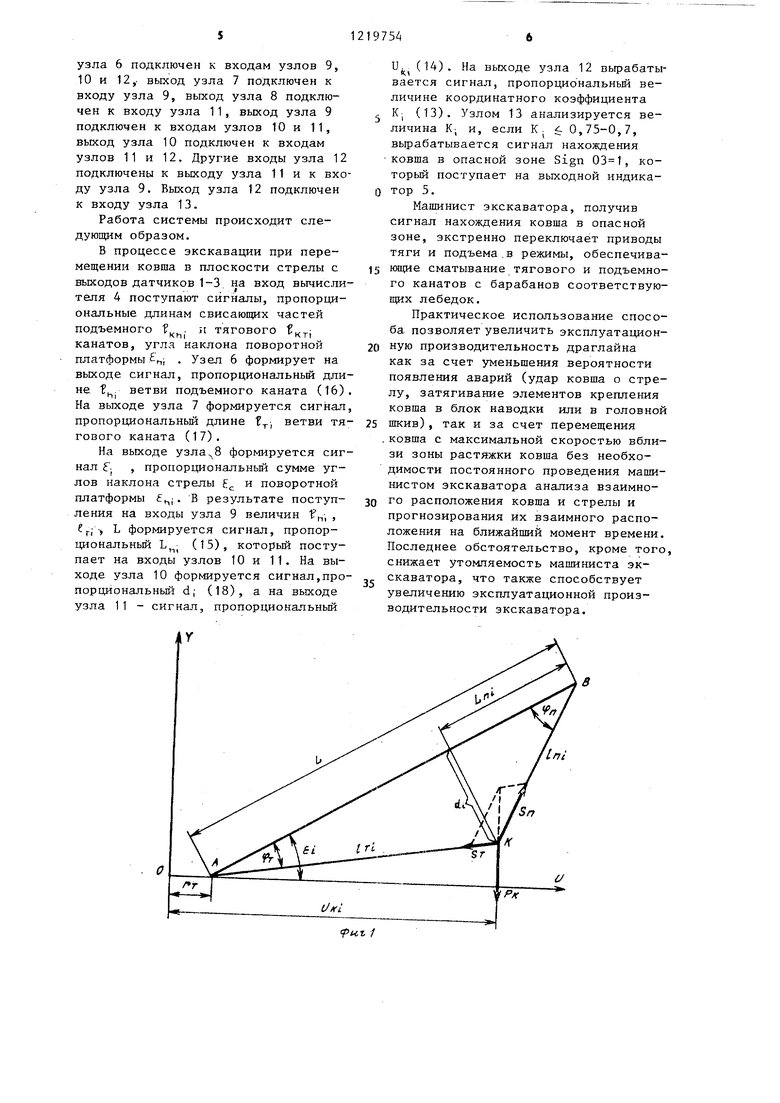
Действительно, из условия равновесия сил и усилий в тяговом и подъемном канатах для точки К (фиг.1) вдоль оси ои можно написать следующее уравнение:
S cos (; -) S sin (90° -, -I J
(1)
для оси OY:
q )(t, -)- OS(,()sin() 4COS ( Е;--,)
или же
-Рц )
S sin i +Гг )
можно записать (фиг.1)
(5)
t.- cos (fi ,) (6)
IT .
(7)
Ч J ri
тогда выражение (5) с учетом (7) можно переписать следующим образом:
К:
РП UK , - ГS, F,; sin ( 0(8)
По теореме синусов имеем:
.l
E.
Tt
t.; (9)
- 1 sin (90 -%)
fhi
4i
(10)
откуда
sin г
(11)
sin (Ч +Ч /) ----{- (12)
ц Тг
4I
S .m(, - J Р, (yO° f,,
-с 2 )
где S , S - усилия в тяговом и подъемном канатах;
f М углы сходов тягового и подъемного канатов с направляющих шкивов; Р. - масса ковша;
Р - Ц.С фактический угол наклона стрелы к горизонту; f f /- углы наклона стрелы и поворотной платформы к горизонту. Из фиг. 1 следует, что
. с
т - COS (., -Y, )(3)
после подстановки (3) в (2) и преобразований имеем
P.i
(4)
тогда
к: - |j5i-.. -1Н«1 Е .. (13) I ь d| L
Текущее значение .абсциссы движущегося ковша в плоскости стрелы определяют по формуле:
к, п - , с ±f.,-) +
+ d. sin (f )(14)
где
LH,
- - f r,- )
jji.
2L
(15)
и, f«,, + Кц «- o,i2e,., (16)
fr; tKTi + T 0,49f., (17)
(18)
d 14, - L,, .
длины свешивающихся час- тей подъемного и тягового
канатов;
длины подъемных и тяговых цепей;
радиусы вращения точек
схода с направляющих шкивов подъемного и тягового канатов;
3
L - расстояние между точками схода тягового и подъемного канатов с направляющих шкивов (условная ось стрелы).
Следует отметить, что величина , определяемая по формуле (14), учитывает фактический угол наклона плоскости платформы к горизонту . т.е. координатньй коэффициент К учитывает соответствующее измене ше допустимого положения ковша и стрелы в зависимости от значения €,;
В экскаваторах по конструктивным соображениям вьщерживается соотношение
h мокс
1,5 Р,
т.е. максимальное усилие в подъемном канате S равно полутора- кратной массе (номинальное значение) груженого ковша. Отсюда следует,что предельная величина координатного. коэффициента равна
1 1,5
0,666
Следовательно, при К 0,666 должна срабатывать защита и отключать главные приводы.
Экспериментально установлено, что при К; 0,75-0,7 (в зависимости от конструктивных особенностей экскаватора) достаточно подавать машинисту экскаватора сигнал о нахождении ковша в опасной зоне и он успевает предпринять необходимые меры по выводу ковша на безопасную траекторию движения.
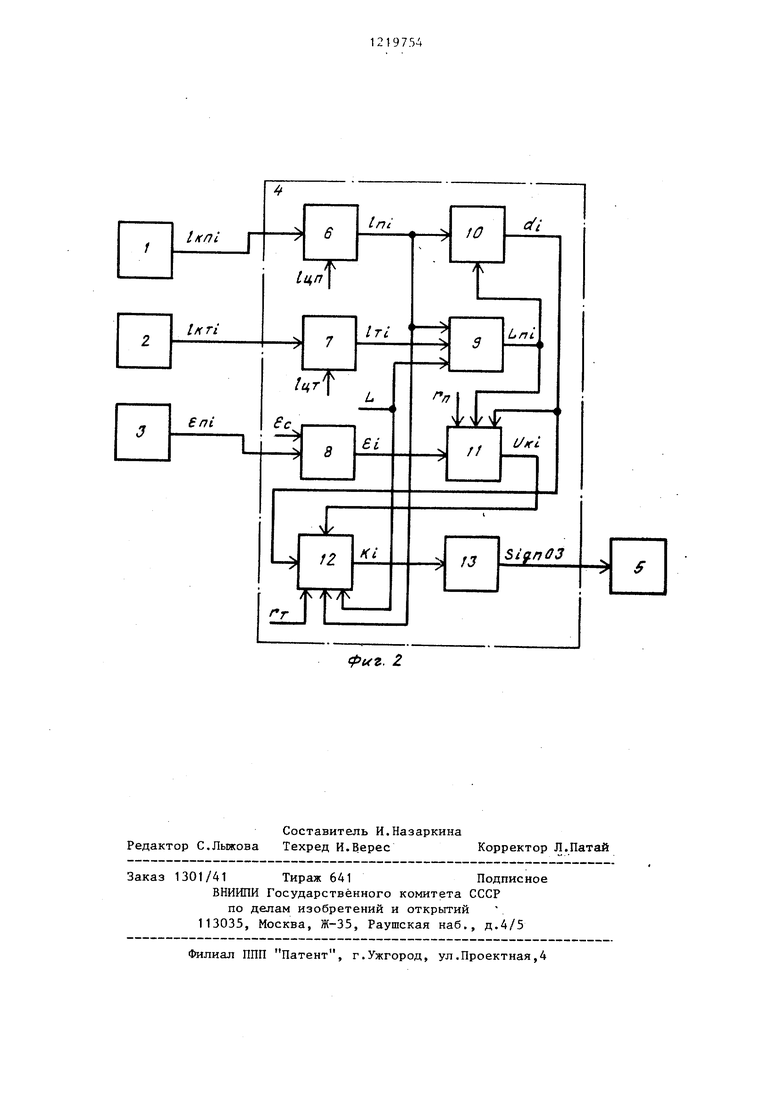
На фиг. 1 показана расчетная схема для определения координатного коэффициента; на фиг. 2 - структурная схема системы, реализующей способ контроля положения ковша экскаватора-драглайна.
Предлагаемый способ включает следующие основные операции: измеряют в процессе экскавации длину свешивающейся части тягового каната (|); измеряют в процессе экскавации длину - вешивающейся части подъемного каната (РК.); измеряют угол наклона плоскости поворотной платформы (f,,, ); определяют текущее значение абсциссы движущегося ковша в плоскости стрелы () по формулам (14)-(18); определяют текущее значение координатного
9754
коэффициента К;; по формуле (13)i формируют сигнал нахождения ковша в опасной зоне
5 sign 03 1,
если К 0,75 - 0,7.
Таким образом, в процессе экскавации обеспечивается формирование сигналов о нахождении ковша в опас0 ной зоне. Машинист, используя указанные сигналы, срочно вьшодит ковш в безопасную зону, тем самым обеспечивая безопасность эксплуатации экскаватора. Следует заметить, что
5 согласно предлагаемому способу при определении абсциссы движущегося ковша U.| учитьшается угол наклона
поворотной платформы к горизонтуf ...
( поэтому при определении текущего
0 значения координатного коэффициента К| 5 также учиты зается и угол j . Поскольку граница опасной зоны определена при . О, то учет фактических значений модуля и знака yглaf,j
5 позволяет формировать сигнал нахождения ковша в опасной зоне Sign 03 1 всегда в расчетной точке опасной , ёоны,, величина которой определена на интервале 0,7-0,75. Таким обра0 зом, угол наклона поворотной платфор- мы HP. влияет на погрешность определения границы опасной зоны, т.е. увеличивается надежность способа. Пример технической реализации способа показан на фиг. 2.
В состав системы входят датчики длин свисающих частей подъемного 1 и тягового 2 канатов, датчик 3 угла наклона плоскости поворотной плат- формы к горизонту, вычислитель 5, выходной индикатор 5. Датчики 1-3 подключены к соответствующим входам вычислителя 4, выход которого подключен к вьЕходному индикатору 5.
Вычислитель 4 содержит следующие
5
функциональные узлы: узел 6 определения длины ветви подъемного каната, узел 7 определения длины ветви тягового каната, узел 8 суммирования
углов, узел 9 определения проекции ветви подъемного каната, узел 10 определения расстояния центра тяжести ковша от условной оси стрелы, узел 11 определения абсциссы положения ковша, узел 12 определения
значения координатного коэффициента, узел 13 формирования сигнала нахождения ковша в опасной зоне. Выход
узла 6 подключен к входам узлов 9, 10 и 12,. выход узла 7 подключен к входу узла 9, выход узла 8 подключен к входу узла 11, выход узла 9 подключен к входам узлов 10 и 11, выход узла 10 подключен к входам узлов 11 и 12. Другие входы узла 12 подключены к выходу узла 11 и к входу узла 9. Выход узла 12 подключен к входу узла 13.
Работа системы происходит следующим образом.
В процессе экскавации при перемещении ковша в плоскости стрелы с выходов датчиков 1-3 на вход вычислителя 4 поступают сигналы, пропорциональные длинам свисающих частей подъемного f и тягового кг1 канатов, угла наклона поворотной платформы ы . Узел 6 формирует на выходе сигнал, пропорциональньи дли не f . ветви подъемного каната (16) На выходе узла 7 формируется сигнал пропорциональньи длине ) ветви тягового каната (17).
На выходе узла,8 формируется сигнал fj , пропорциональньи сумме углов наклона стрелы Е и поворотной платформы i. В результате поступления на входы узла 9 величин „, . е - L формируется сигнал, пропор- ци ональньй L, (15), который поступает на входы узлов 10 и 11. На выходе узла 10 формируется сигнал,пропорциональньи d; (18), а на выходе узла 11 - сигнал, пропорциональный
(14). На выходе узла 12 вырабаты
ается сигнал, пропорциональный не ичине координатного коэффициента (13). Узлом 13 анализируется ве- ичина К; и, если К :t 0,75-0,7, ьфабатывается сигнал нахождения ковша в опасной зоне Sign , ко- торьй поступает на выходной индикатор 3.
Машинист экскаватора, получив сигнал нахождения ковша в опасной зоне, экстренно переключает приводы тяги и подъема.в режимы, обеспечива- ннцие сматывание тягового и подъемного канатов с барабанов соответствующих лебедок.
Практическое использование способа позволяет увеличить эксплуатационную производительность драглайна как за счет уменьшения вероятности появления аварий (удар ковша о стрелу, затягивание элементов крепления ковша в блок наводки или в головной шкив), так и за счет перемещения
ковша с максимальной скоростью вблизи зоны растяжки ковша без необходимости постоянного проведения машинистом экскаватора анализа взаимного расположения ковша и стрелы и прогнозирования их взаимного расположения на ближайший момент времени. Последнее обстоятельство, кроме того, снижает утомляемость машиниста экскаватора, что также способствует увеличению эксплуатационной производительности экскаватора.
риг. Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ защиты стрелы драглайна от аварийного режима растяжки ковша | 1969 |
|
SU504855A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
