Изобретение относится к промышленному транспорту, а более точно - к устрой- стЈам для накопления и поштучной выдачи грузов с конвейера.
Целью настоящего изобретения является увеличение емкости конвейера накопителя.
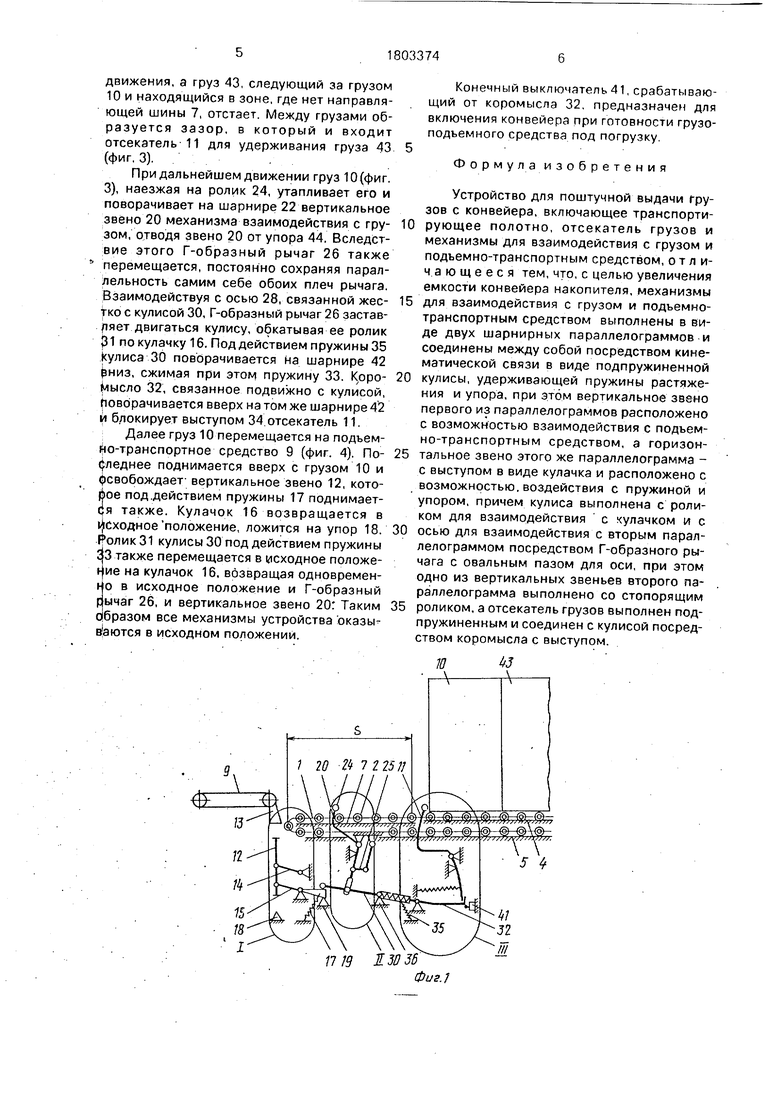
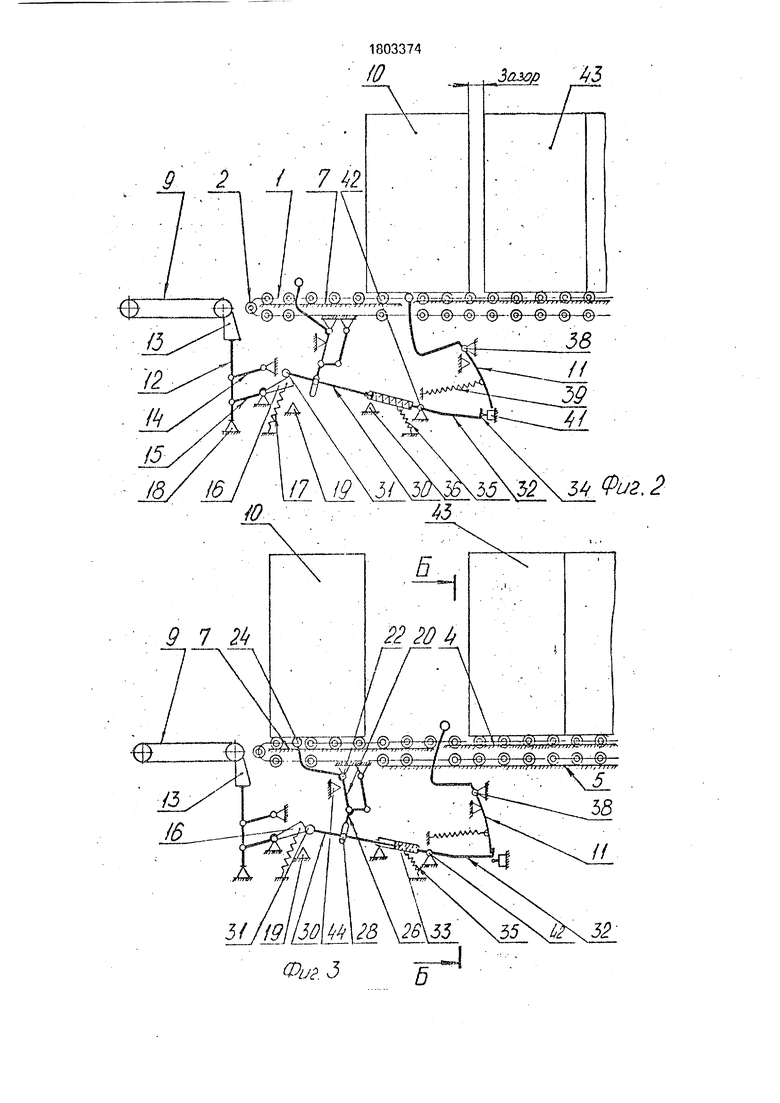
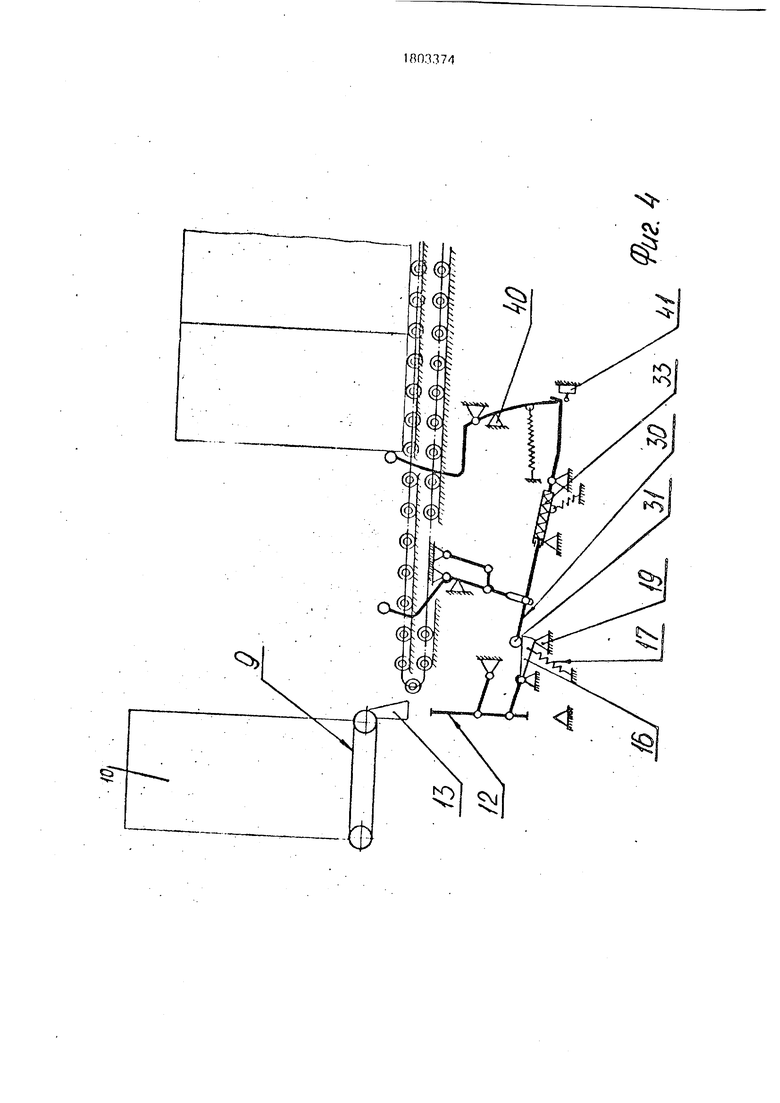
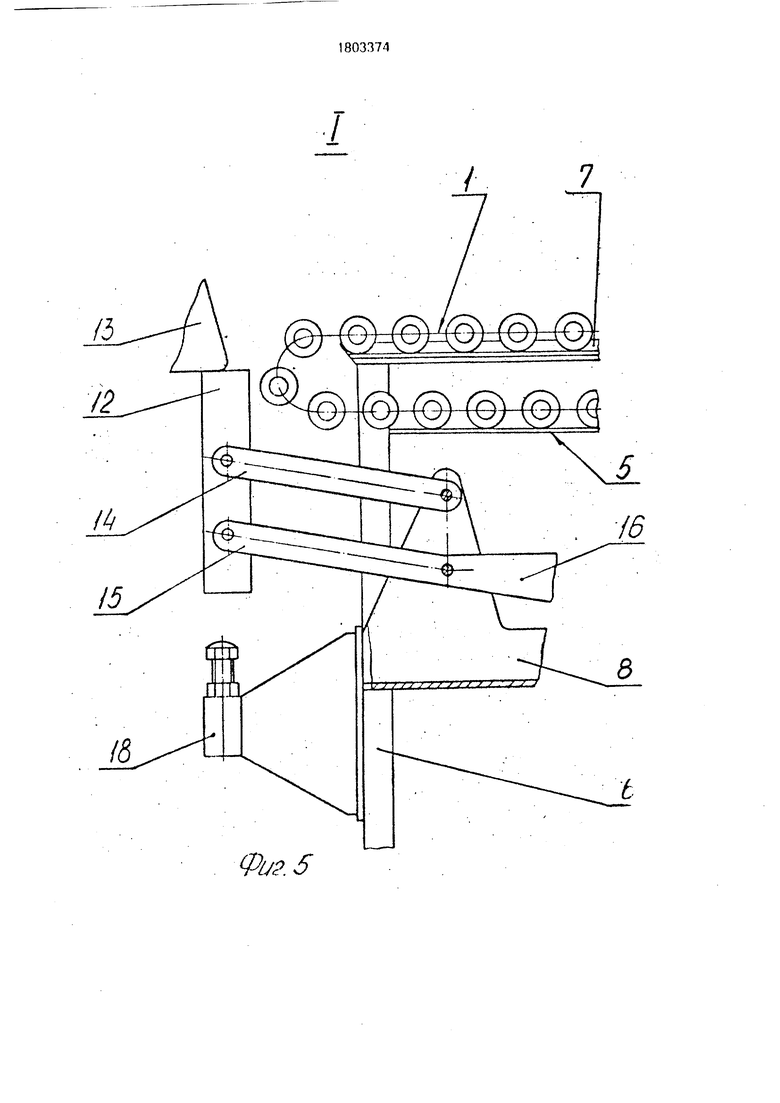
На фиг, 1, 2, 3 и 4 дают общий вид устройства на различных фазах его работы: фит. 1 - исходное положение устройства, ряд грузов удерживается на конвейере отсе- кателем, подъемно-транспортное средство на устройство не воздействует; фиг. 2 - подъемно-транспортное средство взаимодействует с устройством, снимая блокировку с отсекателя, груз, стоящий перед от4екателем, продвигается вперед и отделяете от следующего за ним груза; фиг. 3 - отсекатель блокируется при помощи механизма, взаимодействующего с грузом, толь- ко что отделившимся от общего ряда; на фиг. 4 - подъемно-транспортное средство вместе с грузом идет вверх, устройство освобождается и возвращается в исходное по- ложение; на фиг, 5 - узел, взаимодействующий с подъемно-транспортным средством; на фиг. 6 - узел, взаимодействующий с грузом; на фиг. 7 - конструкция отсекателя; на фиг; 8 - разрез А-А на фиг. 6; на фиг. 9 - разрез Б-Б на фиг. 3; на фиг. 10 - разрез В-В на фиг. 6.
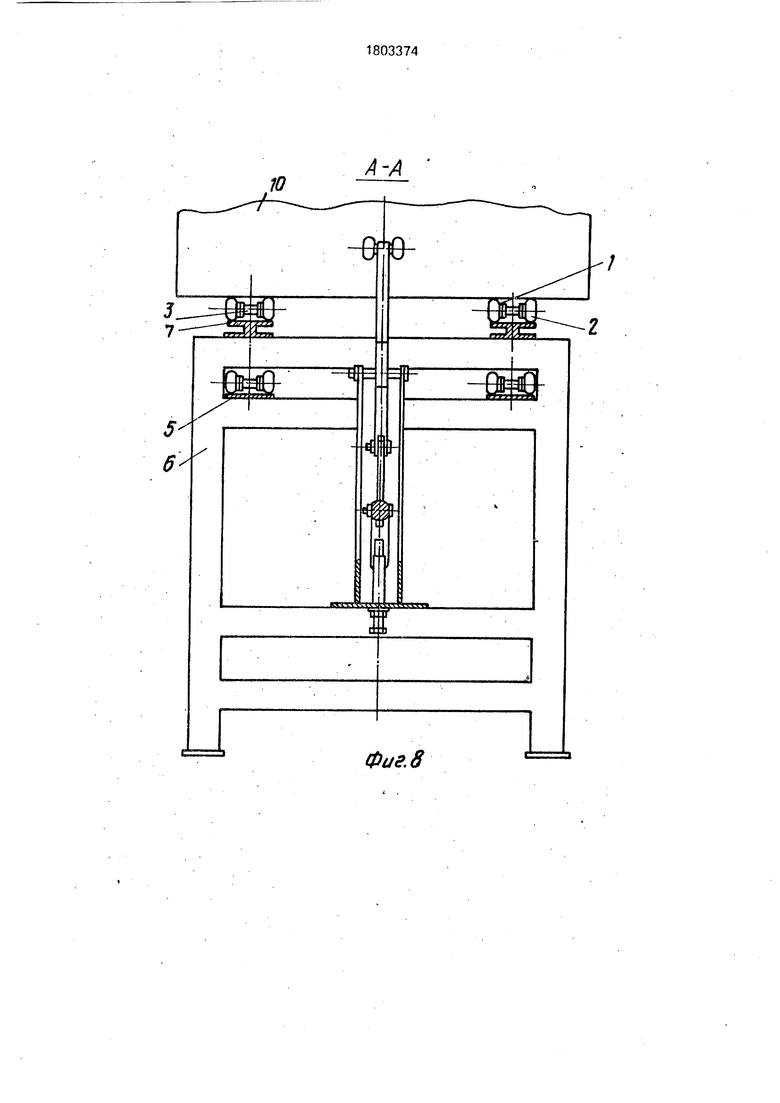
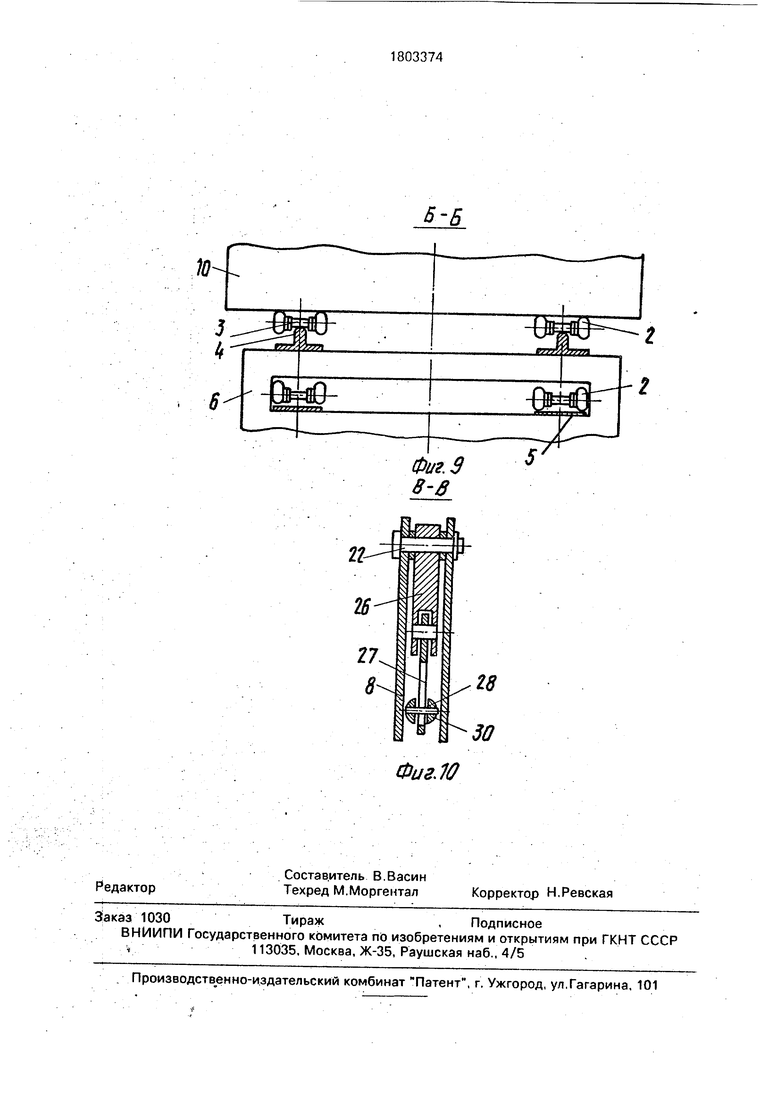
Устройство для поштучной выдачи грузов с конвейера имеет транспортирующее полотно, состоящее из двух вертикально замкнутых цепей 1 (фиг. 1), соосно с шарнирами которых закреплены свободно вращающиеся ролики 2 (фиг. 8). Верхние ветви цепей 1 роликами 3 (фиг. 9) опираются на
00
о ы со XJ
направляющие 4, а нижние - роликами 2 - на направляющие 5, установленные на раме 6 конвейера. В зоне поштучной выдачи (фиг.
I, 8) установлены направляющие шины 7 (фиг. 5), на которые опираются свободно вращающиеся ролики 2, обеспечивающие дополнительную скорость перемещаемому грузу.
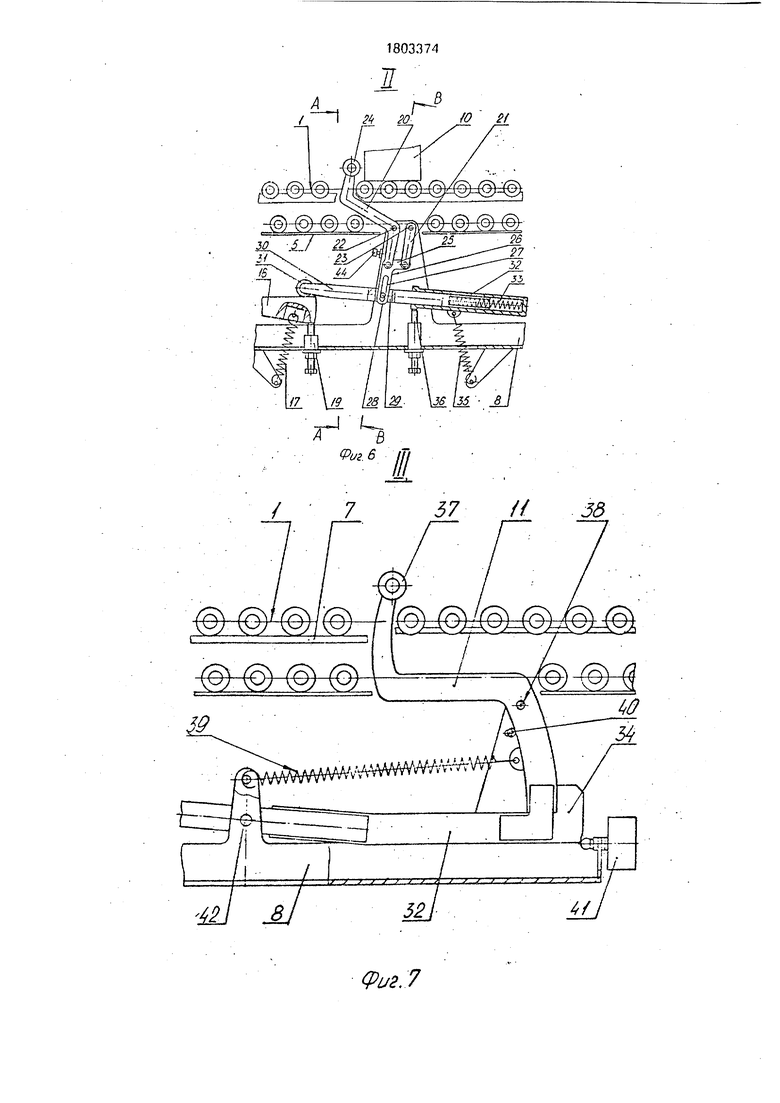
На раме б со стороны выдачи груза (фиг, 5) установлен корпус 8, на котором смонтированы механизмы взаимодействия с подъ- емно транспортным средством 9 и грузом 10, а также отсекатель грузов 11 (фиг, 7). Механизм взаимодействия с подъемно- транспортным средством 9 представляет собою шарнирный параллелограмм. Вертикальное звено 12 (фиг 5) этого параллелограмма подвижно и взаимодействует с упором 13 подъемно-транспортного средства 9. Неподвижным вертикальным звеном является корпус 8, на котором шарнирно закреплены горизонтальные звенья 14 и 15. Причем звено 15 имеет на конце выступ, выполненный в виде кулачка 16. Поворот этого кулачка вверх происходит под воздействием упора 13 подъемно-транспортного средства 9, а возврат в исходное положение - под действием пружины 17 (фиг. 1). Перемещение вертикального звена 12 вниз ограничено упором 18, а кулачка 16 - упором 19.
Механизм взаимодействия с грузом также представляет собою шарнирный параллелограмм, вертикальные звенья 20 и 21 которого (фиг. 6) установлены на шарнирах 22 и 23 в корпусе 8, причем одно из них 20 оканчивается роликом 24, выступающим над полотном конвейера. Неподвижный корпус 8 составляют одно из горизонтальных звеньев этого параллелограмма, а другое горизонтальное его звено 25 (фиг. 6) выполнено в виде Г-образного рычага 26 с овальным отверстием 27. Ролик 24 взаимодействует с грузом 10, а Г-образный рычаг 26 своим овальным отверстием 27 обкатывается около оси 28, закрепленной неподвижно в пазу 29 кулисы 30. Один конец этой кулисы взаимодействует с кулачком 16 через ролик 31, а другой ее конец имеет подвижное телескопическое соединение с левым концом коромысла 32 (фиг. 7). Между коромыслом 32 и кулисой 30 установлена пружина 33 сжатия (фиг. 6), обеспечивающая возврат кулисы в исходное положение после отведения вертикального звена 12 от упора 13 подъемно-транспортного средства 9. Коромысло 32, управляемое кулисой 30, блокирует выступом 34 (фиг, 7) отсекатель
II. Возврат коромысла 32 в исходное поло. жение обеспечивается пружиной 35 (фиг. 1, 6) и ограничивается упором 36.
Отсекатель 11 (фиг. 7) снабжен роликом 37, предназначен для удержания ряда грузов на конвейере и закреплен на шарнире 38 в корпусе 8. Он может поворачиваться под действием груза 10 после разблокирования его коромыслом 32 с выступом 34. Возврат отсекателя 11 в исходное положение осуществляется пружиной 39 (фиг. 2 и 7). Ограничение хода отсекателя 11 создается упором 40(фиг. 7). Для включения конвейера при посадке упора 13 подъемно-транспортного средства 9 на вер5 тикальное звено 12 корпус 8 снабжен конечным выключателем 41, взаимодействующим с выступом 34 коромысла 32, поворачивающегося, в свою очередь, на шарнире 42. Работа устройства осуществляется сле0 дующим образом.
Исходное положение (фиг, 1): грузы 10, поступающие по транспортирующему полотну, удерживаются от дальнейшего продвижения отсекателем 11. Коромыслом 32
5 отсекатель 11 в это время удерживается от поворота, хотя движущаяся лента роликового цепного конвейера 1 проскальзвтает под . неподвижным грузом 10. Само коромысло 32 в этом положении удерживается пружи0 ной 35 и упором 36. Вертикальное звено 12 механизма взаимодействия с подъемно- транспортным средством 9 находится в вер- хнем положении, поскольку звено 15 шарнирного параллелограмма пружиной 17
5 подтягивается к упору 19. Вертикальное звено 20 механизма взаимодействия с грузом также находится в верхнем положении, а его ролик 24 выступает над транспортирующим полотном.
0 При выдаче груза 10 с конвейера на подъемно-транспортное средство 9 (фиг. 2) последнее, опускаясь под погрузку, своим упором 13 нажимает на вертикальное звено 12, которое также опускается и поворачив.а
5 ет горизонтальное звено 15 с кулачком 16. Этот кулачок, преодолевая сопротивление пружины 17 и обкатывающегося по нему ролика 31, поворачивает кулису 30 вверх и отводит ее от упора 36. Коромысло 32 при
0 этом поворачивается вниз на шарнире 42 (фиг. 7). Отсекатель 11, удерживаемый выступом 34, также поворачивается под действием груза, преодолевая усилие пружины 35.
5 Утопив отсекатель 11, груз 10 перемещается в зону S поштучной выдачи грузов. В этой зоне ролики 2, на которых оказывается груз, вступает во взаимодействие с направляющей шиной 7 (фиг. 2). В результате этого груз 10 получает удвоенную скорость
движения, а груз 43, следующий за грузом 10 и находящийся в зоне, где нет направляющей шины 7, отстает. Между грузами образуется зазор, в который и входит отсекатель 11 для удерживания груза 43 (фиг, 3).
При дальнейшем движении груз 10(фиг. 3), наезжая на ролик 24, утапливает его и поворачивает на шарнире 22 вертикальное звено 20 механизма взаимодействия с грузом, отводя звено 20 от упора 44. Вследствие этого Г-образный рычаг 26 также перемещается, постоянно сохраняя параллельность самим себе обоих плеч рычага. Взаимодействуя с осью 28, связанной жес- 1-ко с кулисой 30, Г-образный рычаг 26 заставляет двигаться кулису, обкатывая ее ролик |31 по кулачку 16. Под действием пружины 35 Кулиса 30 поворачивается на шарнире 42 рниз, сжимая при этом пружину 33. Коро- Мысло 32, связанное подвижно с кулисой, Поворачивается вверх на том же шарнире 42 и блокирует выступом 34 отсекатель 11.
Далее груз 10 перемещается на подъем- йо-транспортное средство 9 (фиг. 4). По- фледнее поднимается вверх с грузом 10 и фсвобождает- вертикальное звено 12, которое под .действием пружины 17 поднимает- с|я также. Кулачок 16 возвращается в сходное положение, ложится на упор 18. Ролик 31 кулисы 30 под действием пружины 3 также перемещается в исходное положение на кулачок 16, возвращая одновремен- йо в исходное положение и Г-образный рычаг 26, и вертикальное звено 20: Таким
Образом все механизмы устройства оказы- в аются в исходном положении.
5
0
5
0
0
5
Конечный выключатель 41, срабатывающий от коромысла 32, предназначен для включения конвейера при готовности грузоподъемного средства под погрузку.
Формула изобретения
Устройство для поштучной выдачи грузов с конвейера, включающее транспортирующее полотно, отсекатель грузов и механизмы для взаимодействия с грузом и подъемно-транспортным средством, о т л и- ч.ающееся тем, что, с целью увеличения емкости конвейера накопителя, механизмы для взаимодействия с грузом и подъемно- транспортным средством выполнены в виде двух шарнирных параллелограммов и соединены между собой посредством кинематической связи в виде подпружиненной кулисы, удерживающей пружины растяжения и упора, при этом вертикальное звено первого из параллелограммов расположено с возможностью взаимодействия с подъемно-транспортным средством, а горизонтальное звено этого же параллелограмма - с выступом в виде кулачка и расположено с возможностью, воздействия с пружиной и упором, причем кулиса выполнена с роликом для взаимодействия с кулачком и с осью для взаимодействия с вторым параллелограммом посредством Г-образного рычага с овальным пазом для оси, при этом одно из вертикальных звеньев второго параллелограмма выполнено со стопорящим роликом, а отсекатель грузов выполнен подпружиненным и соединен с кулисой посредством коромысла с выступом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор ориентации и загрузки штучных заготовок | 1990 |
|
SU1722782A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Подвесной конвейер | 1985 |
|
SU1283174A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Устройство для загрузки подвесок подвесного конвейера | 1987 |
|
SU1507695A1 |
| Транспортно-складская система | 1986 |
|
SU1370032A1 |
| Устройство для погрузки штучных грузов в вагон | 1989 |
|
SU1735170A1 |
Сущность изобретения: механизмы для взаимодействия с грузом и подъёмно-транспортным средством, выполнены в виде двух шарнирных параллелограммов и соединены между собой посредством кинематической связи в виде подпружиненной кулисы, удерживающей пружины растяжения и упора, при этом вертикальное звено первого из параллелограммов расположено с возможностью взаимодействия с подъемно-транспортным средством, а горизонтальное звено этого же параллелограмма выполнено с выступом в виде кулачка и расположено с возможностью взаимодействия с пружиной и с упором. Кулиса выполнена с роликом для взаимодействия со вторым параллелограммом посредством Г-образного рычага с овальным пазом для оси, при этом одно из вертикальных звеньев второго параллелограмма выполнено со стопорящим роликом, а отсекатель грузов выполнен подпружиненным и соединен с кулисой посредством коромысла с выступом. 10 ил.
