Изобретение относится к производству медицинской техники и может быть использовано для непрерывной намотки хирургической нити,
Цель изобретения - повышение производительности.
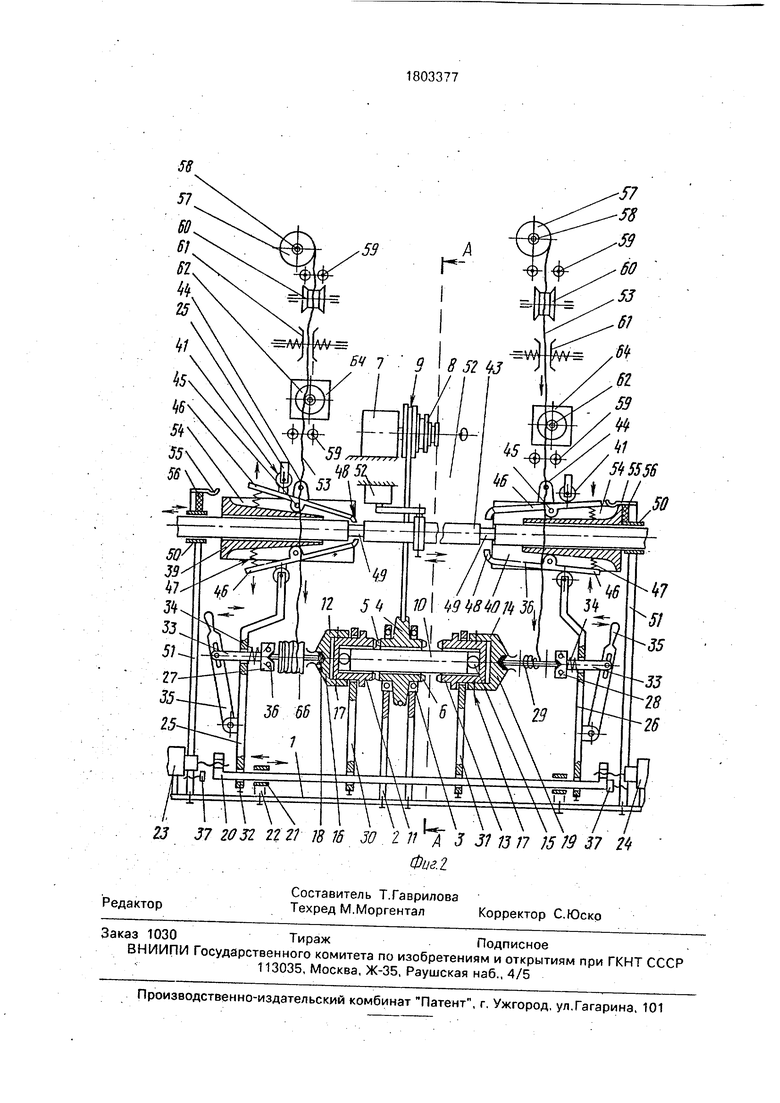
На фиг. 1 изображен общий вид станка в разрезе; на фиг. 2 -. кинематическая схема станка,
Станок для непрерывной намотки хирургической нити содержит основание 1, на котором закреплены неподвижно стойки 2, удерживающие в подшипниковых опорах 3 приводной шкив 4 с торцовыми полумуфтами 5 и 6. Приводной шкив 4 для намотки хирургической нити связан с приводом намотки 7 через ступенчатый шкив 8 посредством ременной передачи 9. Внутри приводного шкива 4 смонтирована направляющая распорная ось 10 с возможностью вращательно-постунательного движения, концы .которой расположены соосно в торцевой полумуфте 11 левостороннего шпинделя 12 и торцевой полумуфте 13 правостороннего шпинделя 14. В торцах направляющей распорной оси 10 и торцовых полумуфт 11, 13 расположены опорные шарики 15. Левосторонний шпиндель 12 содержит держатель шпули 16 жестко закрепленный на торцовой полумуфте 11 штифтом 17 и эластичный упор 18, а правосторонний шпиндель 14 содержит держатель шпули 19, жестко закрепленный на торцовой полумуфте 13 штифтом 17 и эластичный упор 18. Соосность шпинделей 12 и 14 и приводного шкива 14 обеспечивается направляющей распорной осью 10. Механизм переключения шпинделей 12 и .14 выполнен в виде подвижной рамы 20 в направляющих 21 сто- ек 22, соединенную с приводами 23, 24. На подвижной раме 20 закреплены кронштейны управления укладки 25 и 26, на которых смонтированы головки прижима 27, 28 шпули 29, а кронштейны 30 и 31 для удержа- .ния левостороннего 12 и правостороннего шпинделя 14. При этом головки прижима 27 и 28 шпуль 29 и шпинделей 12 и 14 смонтированы соосно приводного шкива 4 с возможностью их взаимодействия посредством торцовых полумуфтовых соединений 11 и 13, 5 и 6. Кронштейны 25, 26, 30, 31 смонтированы на подвижной раме 20 с возможностью регулирования, а их положение фиксируется винтами 32, Головки прижима 27, 28 шпуль 29 содержат шток 33, пружину 34, рычаг 35, подшипник 36 с эластичным упором 18. Перемещение подвижной рамы 20 ограничивается регулируемыми упорами 37. Механизм переключения укладки хирургической нити ср держит кронштейны управления укладки 25, 26 в которых с противоположной стороны крепления к подвижной раме 20 выполнены С-образные вырезы 38 для поочередного
взаимодействия с муфтами 39, 40 механизма укладки нити. Для уменьшения сил трения противоположные стороны С-образного выреза 38 выполнены в виде прижимных роликов 41, свободно смонтированных на
эксцентричных осях 42 для регулирования их положения. Механизм укладки хирургической нити выполнен в виде муфт 39, 40, свободно насаженных на несущую штангу 43, расположенную по центру С-образного
выреза 38. Муфты 39, 40, оборудованы ните- укладчиками 44 поворотными на осях 45 двуплечими рычагами-собачками, 46, пружинами 47 с одной стороны и рабочими но- совыми частями 48 на другой для
взаимодействия с соответствующим углублением 49 на несущей штанге 43, которая смонтирована в направляющих 50 стоек 51 с возможностью непрерывного возвратно- поступательного движения приводом 52 совместно с одной из муфт укладки 39 или 40 нити 53 с одновременным воздействием С- образным вырезом 38 на двуплечие рычаги- собачки 46 прот.ивополохсной муфты для ее отключения. Рабочие носовые части 48 двуплечих рычагов-собачек 46 муфт 39, 40 укладки нити 53 расположены в направлении С-образных вырезов 38 кронштейнов управления укладки 25, 26. На корпусах муфт 39, 40 выполнены углубления 54 для их удержания пластинчатым фиксатором 55 в нерабочем крайнем положении при ее отключении. Для смягчения удара муфт 39, 40 в крайних положениях на стойках 51 закреплены эластичные амортизаторы 56. Механизм подачи нити 53 содержит бобину 57, свободно насаженную на ось 58 с вертикальными 59 и горизонтальными 60 роликами, тормозное устройство 61 для регулирования натяжения нити 53, измерительные ролики 62 и
нитенаправитель 63., механизм отсчета мет- ража 64, направляющую планку 65, рулончик /шпуля с намотанной хирургической нитью/ 66.. .
Станок для непрерывной намотки хирургической нити работает следующим образом..
Бобины 57 с нитью 53 насаживаются на ось 58. Нить 53 пропускается через вертикальные 59 и горизонтальные 60 ролики,
тормозное устройство 61 и наматываются 2 ,,,3 петли нити 53 на измерительный ролик 62 механизма отсчета метража 64 с одновременным отсчетом метража протягиваемой нити 53 и через нитенаправители 63 нитеукладчики 44, закрепляется ее конец на
шпулях 29. Перемещением рычага 35 шток 33 совместно с головкой прижима 27 шпули 29 перемещается влево, увеличивая расстояние между головкой прижима 27 шпули 29 и держателем шпули 16. В это время шпуля 29 с закрепленным концом нити 53 .заводится в держатель шпули 16, освобождая рычаг 35, пружина 34 перемещает головку прижима 27 шпули 29 вправо и прижимает шпулю 29 в держателе 16 к эластичному упору 18. Заправка шпули 29 в держатель шпули 19 правостороннего шпинделя 14 с
прижимом головкой 28 производится аналогично левостороннего шпинделя 12. После заправки шпуль 29 с закрепленными концами хирургической нити 53 включается привод намотки 7 и привод 52 укладки нити. В зависимости от положения подвижной рамы 20 осуществляется вращение левостороннего 12 или правостороннего шпинделей 14 посредством торцовых полумуфт 11 и 5 или 13 и 6. На фиг. 2 показан момент сцепления торцовой полумуфты 11 с торцовой полумуфтой 5 приводного шкива 4, взаимодействующего через ременную передачу 9 со ступенчатым шкивом 8 привода намотки 7. Торцовая полумуфта 11 приводит во вращательное движение держатель шпули 16 с эластичным упором 18 шпулю 29 с закреплённым концом хирургической нити 53, что приводит к процессу намотки нити 53. При этом правосторонний шпиндель 14 неподвижен. Одновременно привод 52 механизма укладки нити приводит в возвратно-поступательное движение несущую штангу 43, которая углублением 49 и рабочим насосовыми частями 48 двуплечих рычагов-собачек 46 передает движение муфте 39 с нитеукладчиком 44, что производит укладку нити 53 при ее намотке на шпулю 29. Причем муфта 40 удерживается от перемещения пластинчатым фиксатором 55 в углублений 54, а рабочие носовые части 48 двуплечих рычагов, собачек 46 выведены из
углубления 49. несущей штанги 43, так как кронштейн управления укладки 26 находится в крайнем правом положении и прижимными роликами 41 воздействует на собачки ,46. По окончании намотки нити 53 на шпулю 29 левосторонним шпинделем 12 и образования рулончика 66, измерительный ролик 62 через механизм отсчета метража 64 дает ;команду /сигнал/ приводу 23, который перемещает подвижную раму 20 с кронштейнами 25, 26, 30, 31 влево до регулируемого упора 37. При этом кронштейны 30 и 31 перемещают шпиндели 12 и 14 влево и выводят торцовую полумуфту 11 из зацепления с торцовой полумуфтой 6, что приводит к остановке левостороннего шпинделя 12 с
одновременным перемещением правостороннего шпинделя 14 влево до зацепления торцовой полумуфтой 13 с торцовой полумуфтой 6, что приведет к вращательному 5 движению шпиндель 14, держатель шпули 19 с эластичным упором 18 шпулю 29 с закрепленным концом хирургической нити 53, Одновременно кронштейн управления укладки 25 перемещается влево, наезжает ро0 ликами прижима 41 на хвостовую часть собачек 46, при этом рабочие носовые части 48 собачек 46 выходят из зацепления с углублением 49 несущей штанги 43, что приводит к отключению и остановке муфты 39 в
5 крайнем положении внутри С-образного выреза 38 с вхождением пластинчатого фиксатора 55 в углубление 54 муфты 39. Одновременно кронштейн управления укладки 26 освобождает собачки 46, которые
0 .рабочими носовыми частями 48 прижимаются пружиной 47 и входят в углубление 49 на несущей штанге 43, приводит муфту 40 к возвратно-поступательному движению с нитеукладчиком 44, что осуществляет уклад5 ку нити 53 в рулончик 66, при этом пластинчатый фиксатор 55 выходит из углубления 54 на муфте 40. Во время намотки нити 53 правосторонним шпинделем 14 нить 53 левостороннего шпинделя 12 отрезается, ры0 чаг 35 отжимается влево, расстояние между головкой прижима 27 и держателем шпули 16 увеличивается, шпулю 29 с рулончиком 66 извлекают из держателя шпули 16 Берется свободная шпуля 29, конец нити 53 про5 тягивается и закрепляется на ней. Рычаг 35 перемещается влево, шпуля 29 заправляется в держатель шпули 16. Рычаг 35 освобождается, пружина 34 перемещает головку прижима 27 вправо,-шпуля 29 прижимается
0 к эластичному упору 18 держателя шпули; 16. После этого левая сторона подготовлена к намотке нити 53 на шпулю 29. При достижении заданного метража на шпуле 29 правостороннего шпинделя 14, измерительный
5 ролик 62 механизма отсчета метража 64 дает сигнал на срабатывание привода 23, который перемещает подвижную раму 20 вправо до регулируемого упора 37 с кронштейнами 25, 26, 30, 31. При этом торцовая
0 полумуфта 13 выходит из зацепления с торцовой полумуфтой 6 и шпиндель 14 останавливается, а торцовая полумуфта 11 входит в зацепление с торцовой полумуфтой 5, что приводит во вращательное движение шпин5 дель 12 со шпулей 29 и с закрепленным концом нити 53. Одновременно ролики прижима 41 кронштейна управления укладки 25 .освобождают двуплечие рычаги 46, а пружины 47 прижимают рабочие носовые части 48 К соответствующему углублению 49 несущей штанги 43, которая приводит в возвратно-поступательное движение муфту 39 совместно с нитеукладчиком 44, и тем самым осуществляется укладка нити 53 в рулончик 66. Одновременно ролики прижима 41 кронштейна управления укладки 26 наезжают на двуплечие рычаги 46 и выводят рабочие носовые части 48 из углубления 49 несущей штанги 43, муфта 40 совместно с нитеукладчиком 44 упирается в эластичный амортизатор 56 и останавливается в крайнем правом положении внутри С-образного выреза 38 и удерживается пластинчатым фиксатором 55. Цикл работы последующей намотки хирургической нити повторяется.
Предлагаемый станок для непрерывной намотки хирургической нити позволяет повысить производительность труда за счет непрерывного поочередного вращения шпинделей,снизить расход электроэнергии на единицу намотки за счет снижения времени холостой работы привода намотки, улучшить условия труда обслуживающего персонала, кроме того регулируемые усилия дисков тормозного устройства для натяжения нити дают возможность производить ее намотку на шпулю различной толщины. - Формула изобретения 1. Станок для непрерывной намотки нитевидного материала, преимущественно хирургической нити, содержащий два соосных шпинделя для шпулей, связанные с приводом вращения посредством ременной передачи и муфт сцепления и имеющие привод осевого перемещения, рычажный механизм, укладки нити и механизм переключения, о т- ли чающийся тем, что, с целью повышения производительности, механизм
переключения выполнен в виде приводной рамы с кронштейнами, на которых смонтированы шпиндели, снабженные головками прижима, а внутри приводного шкива смонтирована направляющая распорная ось с возможностью вращательного поступательного перемещения, при этом механизм укладки включает несущую штангу с углублениями и установленные на штанге
муфты с двуплечими подпружиненными собачками для поочередного размещения их носовых частей в углублениях штанги, а 9в кронштейнах выполнены С-образные вырезы, в которых размещена несущая штанга с
возможностью совместного возвратно-поступательного перемещения поочередно с каждой из муфт.
2. Станок поп. 1,отличающийся тем, что противоположные рабочие стороны С-образного выреза имеют прижимные ролики, установленные на эксцентричных осях.
3. Станок по п. 1,отличающийся тем, что рабочие носовые части собачек рас- положены в направлении С-образного выреза.
4. Станок по п. 1,отличающийся тем, что кронштейны приводной рамы смонтированы с возможностью регулирования и фиксации их положения. . .
5. Станок по п. 1,отличающийся там, что направляющая распорная ось смонтирована в -приводном шкиве соосно шпинделям и своими концами расположена в них. 6. Станок по п. 1,отличающийся тем, что кронштейны на участках в С-образ- ных вырезов жестко соединены посредством направляющей планки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2007 |
|
RU2348529C1 |
| Станок для фасонной резки труб | 1979 |
|
SU829363A1 |
| АВТОМАТ ДЛЯ ДОМОТОКИ ШПУЛЬ | 1952 |
|
SU98613A1 |
| Станок для намотки ленточного материала | 1986 |
|
SU1317500A1 |
| Станок для непрерывной намотки нитевидного материала на шпули | 1975 |
|
SU611843A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАМАТЫВАНИЯ НИТИ НА ЧЕЛНОЧНУЮ ШПУЛЮ ШВЕЙНОЙ МАШИНЫ | 1973 |
|
SU367200A1 |
| СТАНОК ДЛЯ НАМОТКИ ВИТКОВ НИТИ НА КОРПУС ТОПЛИВНОГО ФИЛЬТРА | 1949 |
|
SU90544A1 |
| СТАНОК ДЛЯ НАМОТКИ ЛЕНТЫ В РУЛОНЧИКИ | 1970 |
|
SU271297A1 |
| Мотальная машина для крестовой намотки швейных и т.п. ниток на бумажные гильзы | 1931 |
|
SU26949A1 |
| Устройство для перемотки текстильных нитей | 1986 |
|
SU1395715A1 |